在PCL中如何实现点云压缩(2)
博客转载自:http://www.pclcn.org/study/shownews.php?lang=cn&id=125
压缩配置文件:
压缩配置文件为PCL点云编码器定义了参数集。并针对压缩从OpenNI采集器获取的普通点云进行了优化设置。请注意,解码对象不需要用参数表示,因为它在解码时检测并获取对应的编码参数配置。下面的压缩配置文件是可用的:
LOW_RES_ONLINE_COMPRESSION_WITHOUT_COLOR:分辨率1cm3,无颜色,快速在线编码
LOW_RES_ONLINE_COMPRESSION_WITH_COLOR:分辨率1cm3,有颜色,快速在线编码
MED_RES_ONLINE_COMPRESSION_WITHOUT_COLOR:分辨率5mm3,无颜色,快速在线编码
MED_RES_ONLINE_COMPRESSION_WITH_COLOR:分辨率5mm3,有颜色,快速在线编码
HIGH_RES_ONLINE_COMPRESSION_WITHOUT_COLOR:分辨率1mm3,无颜色,快速在线编码
HIGH_RES_ONLINE_COMPRESSION_WITH_COLOR:分辨率1mm3,有颜色,快速在线编码
LOW_RES_OFFLINE_COMPRESSION_WITHOUT_COLOR:分辨率1cm3,无颜色,高效离线编码
LOW_RES_OFFLINE_COMPRESSION_WITH_COLOR:分辨率1cm3,有颜色,高效离线编码
MED_RES_OFFLINE_COMPRESSION_WITHOUT_COLOR:分辨率5mm3,无颜色,高效离线编码
MED_RES_OFFLINE_COMPRESSION_WITH_COLOR:分辨率5mm3,有颜色,高效离线编码
HIGH_RES_OFFLINE_COMPRESSION_WITHOUT_COLOR:分辨率5mm3,无颜色,高效离线编码
HIGH_RES_OFFLINE_COMPRESSION_WITH_COLOR:分辨率5mm3,有颜色,高效离线编码
MANUAL_CONFIGURATION允许为高级参数化进行手工配置
高级参数化:
为了能完全控制压缩相关的参数,PointCloudCompression类的构造函数可以在初始化时附加压缩参数。请注意,为了启用高级参数化,compressionProfile_arg参数需要被设置成MANUAL_CONFIGURATION。
PointCloudCompression (compression_Profiles_e compressionProfile_arg,
bool showStatistics_arg,
const double pointResolution_arg,
const double octreeResolution_arg,
bool doVoxelGridDownDownSampling_arg,
const unsigned int iFrameRate_arg,
bool doColorEncoding_arg,
const unsigned char colorBitResolution_arg)
下面解释高级参数化设置:
compressionProfile_arg:为了启用高级参数化,该参数应该被设置成MANUAL_CONFIGURATION。
showStatistics_arg:把压缩相关的统计信息打印到标准输出。
pointResolution_arg:定义点坐标的编码精度,该参数应该设置成小于传感器精度的一个值。
octreeResolution_arg:该参数定义展开了的octree的体素大小,较大的体素分辨率使得压缩更快,但是压缩质量下降,这在较高的帧速率(上传速率)和压缩效率中间进行了折中设置。
doVoxelGridDownDownSampling_arg:如果激活该参数,那么只编码分层octree的数据结构,解码对象在体素中心生成点,通过这种方法,点云在压缩期间被下采样,同时达到了较高的压缩性能。
iFrameRate_arg:点云压缩模式对点云进行差分编码压缩,用这种方法,对新引入的点云和之前编码的点云之间的差分进行编码,以便获得最大压缩性能,iFrameRate_arg允许指定数据流中的某一帧速率,在这一速率下传输的点云就不进行差分编码压缩(和视频编码中的I/P帧类似)。
doColorEncoding_arg:该选项启用彩色纹理成分编码压缩。
colorBitResolution_arg:该参数定义每一个彩色成分编码后的占比特数。
PCL点云数据流压缩的命令行工具
PCL应用程序工具中包含点云流数据压缩命令行工具openni_stream_compression.exe,用户可以可以查看选项的完整列表(注意:屏幕上的输出可能不同)。该工具可以安装好的PCL的bin目录下找到。用户可以自行试验,看看其强大的功能,具体参看其命令行帮助提示。例如它可以通过网络进行点云压缩传输。
为了通过TCP/IP传输压缩点云,可以用下面的命令启动服务器:
...>openni_stream_compression.exe -s
它会监听6666端口看是否有接入连接请求,用下面的命令开启客户端:
...>openni_stream_compression -c SERVER_NAME
远程采集到的点云可以通过点云查看工具在本地显示,笔者测试结果如图所1所示。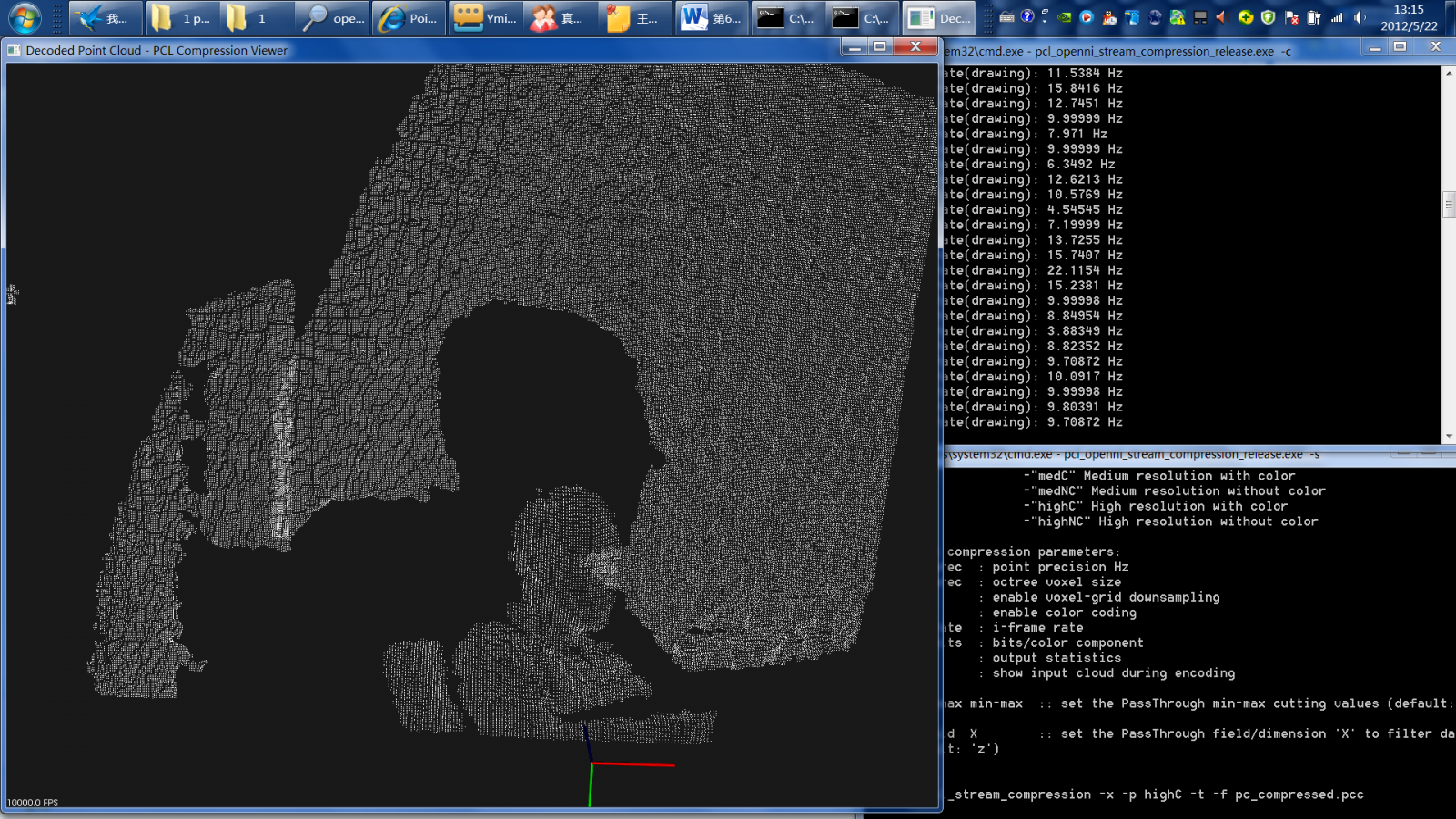
图1 点云数据流压缩结果
敬请关注PCL(Point Cloud Learning)中国更多的点云库PCL(Point Cloud Library)相关官方教程。
参考文献:
1.朱德海、郭浩、苏伟.点云库PCL学习教程(ISBN 978-7-5124-0954-5)北京航空航天出版社2012-10
在PCL中如何实现点云压缩(2)的更多相关文章
- 在PCL中如何实现点云压缩(1)
点云由庞大的数据集组成,这些数据集通过距离.颜色.法线等附加信息来描述空间三维点.此外,点云能以非常高的速率被创建出来,因此需要占用相当大的存储资源,一旦点云需要存储或者通过速率受限制的通信信道进行传 ...
- PCL中的OpenNI点云获取框架(OpenNI Grabber Framework in PCL)
从PCL 1.0开始,PCL(三维点云处理库Point Cloud Library)提供了一个通用采集接口,这样可以方便地连接到不同的设备及其驱动.文件格式和其他数据源.PCL集成的第一个数据获取驱动 ...
- PCL中outofcore模块---基于核外八叉树的大规模点云的显示
写在前面 最近公众号的活动让更多的人加入交流群,尝试提问更多的我问题,群主也在积极的招募更多的小伙伴与我一起分享,能够相互促进. 这里总结群友经常问,经常提的两个问题,并给出我的回答: (1) ...
- 基于传统方法点云分割以及PCL中分割模块
之前在微信公众号中更新了以下几个章节 1,如何学习PCL以及一些基础的知识 2,PCL中IO口以及common模块的介绍 3,PCL中常用的两种数据结构KDtree以及Octree树的介绍 ...
- PCL中的类
1. PCLBase pcl_base.h中定义了PCL中的基类PCLBase,PCL中的大部分算法都使用了其中的方法. PCLBase实现了点云数据及其索引的定义和访问. 两个主要的变量input_ ...
- PCL—低层次视觉—点云分割(基于凹凸性)
1.图像分割的两条思路 场景分割时机器视觉中的重要任务,尤其对家庭机器人而言,优秀的场景分割算法是实现复杂功能的基础.但是大家搞了几十年也还没搞定——不是我说的,是接下来要介绍的这篇论文说的.图像分割 ...
- PCL—低层次视觉—点云分割(邻近信息)
分割给人最直观的影响大概就是邻居和我不一样.比如某条界线这边是中华文明,界线那边是西方文,最简单的分割方式就是在边界上找些居民问:"小伙子,你到底能不能上油管啊?”.然后把能上油管的居民坐标 ...
- PCL—低层次视觉—点云分割(RanSaC)
点云分割 点云分割可谓点云处理的精髓,也是三维图像相对二维图像最大优势的体现.不过多插一句,自Niloy J Mitra教授的Global contrast based salient region ...
- mac中vmware tools进行磁盘压缩和vmware-tools-cli的使用方法
前言: 高高兴兴的在vmware9.0中安装了mac10.8系统,然后学习iphone开发,但是发现下载的pdf都是基于xcode3.2.5的,又在10.8上面安装3.2.5,出现“五国”无法解决,最 ...
随机推荐
- HDFS常见问题
在HDFS里面,data node上的块大小默认是64MB(或者是128MB或256MB) 问题: 为什么64MB(或128MB或256MB)是最优选择? 为什么不能远少于64MB(或128MB或25 ...
- 格式化namenode时 报错 No Route to Host from node1/192.168.1.111 to node3:8485 failed on socket timeout exception: java.net.NoRouteToHostException: No route to host
// :: FATAL namenode.NameNode: Failed to start namenode. org.apache.hadoop.hdfs.qjournal.client.Quor ...
- Bootstrap(二)段落+强调内容
在Bootstrap中为文本设置了一个全局的文本样式(这里所说的文本是指正文文本): 1.全局文本字号为14px(font-size). 2.行高为1.42857143(line-height),大约 ...
- 简单封装的Log4net
1. [代码]使用 log = new Logger(this.GetType());log.Info("Hello world.");2. [代码]第二个版本,修复了Co ...
- 微信等webview中无法修改document.title的情况
// hack在微信等webview中无法修改document.title的情况 var $iframe = $('<iframe src="https://www.bbtree.co ...
- Oracle使用hs odbc连接mssql2008
1.创建odbc 2.在 product\11.2.0\dbhome_1\hs\admin\ 下拷贝initdg4odbc,把名字改为initcrmsql(init+所建odbc的名称) HS_FD ...
- Unity3D之Mesh(二)为三角形添加纹理
一.直接開始上步驟 首先繪製一個三角形 創建一個材質,以便後續使用: 1)材質使用的貼圖 2)上代碼 using UnityEngine; using System.Collections; /* = ...
- 如何使用SSDT进行SQL数据库的自动化部署到生产环境和版本控制
简介 在开发过程,我们常常会遇到数据库环境部署的问题,当部署正式环境中,数据库产生的多文件脚本在管理上就容易出现混乱,特别是你还没有权限访问正式环境的情况,就更为困难.SSDT为我们提供了很好的解决方 ...
- PyCharm配置过程记录
也可以通过命令行来上传和下载git bash here 同步最新代码到本地: git fetch git pull 上传文件至git仓库: git commit git push 安装第三方模块方式 ...
- Tomcat_异常_02_IOException while loading persisted sessions: java.io.EOFException
异常原因: EOFException表示输入过程中意外地到达文件尾或流尾的信号,导致从session中获取数据失败. 这是由于tomcat上次非正常关闭时有一些活动session被持久化(表现为一些临 ...