基于机器人自主移动实现SLAM建图
基于[移动机器人运动规划及运动仿真],详见之前的博客
参考链接
环境配置
ubuntu 18.04
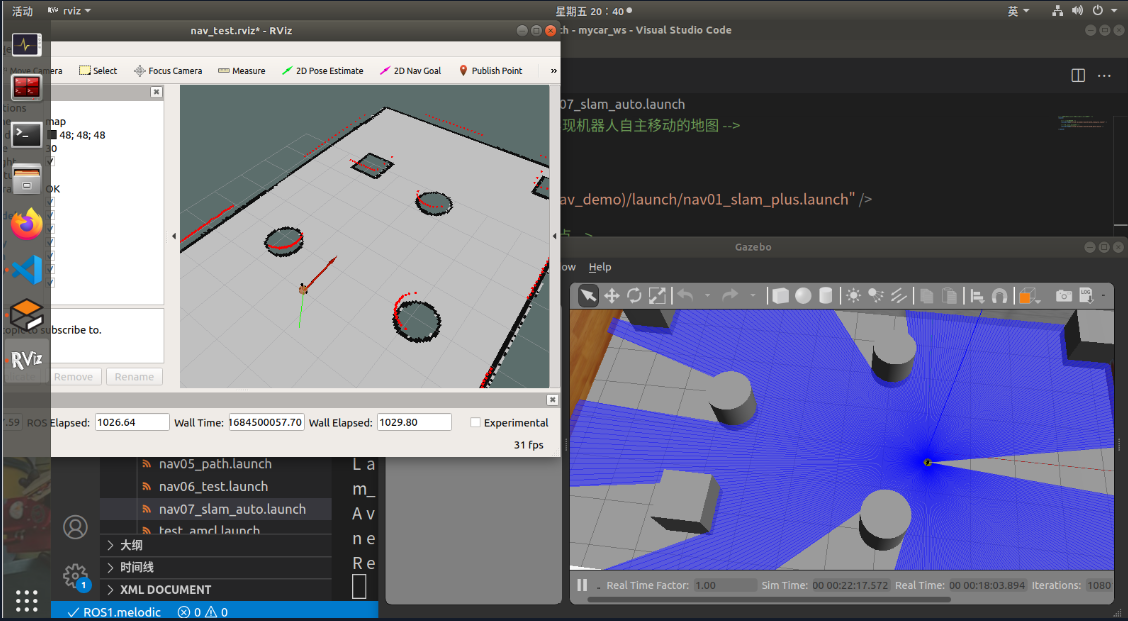
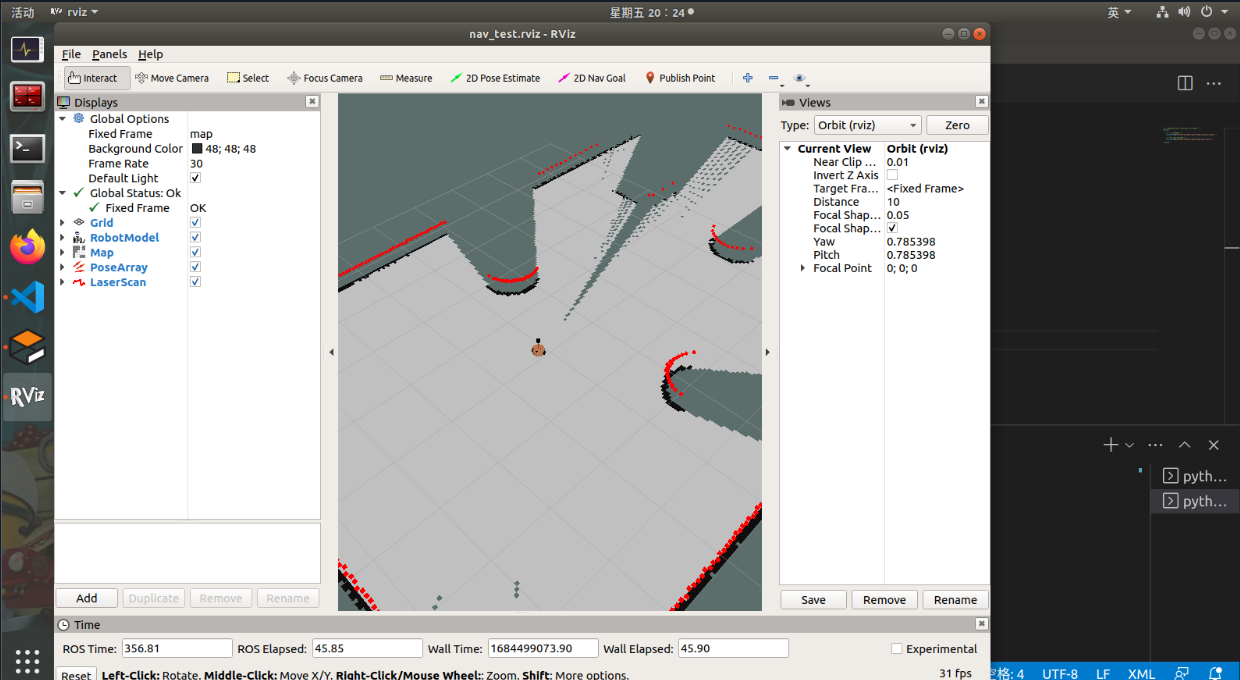
成果图
编写 launch 文件
mycar_ws/src/nav_demo/launch/nav01_slam_plus.launch
<launch>
<!-- 仿真环境下,将该参数设置为true -->
<param name="use_sim_time" value="true"/>
<!-- gmapping -->
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen">
<!-- 设置雷达话题 -->
<remap from="scan" to="scan"/>
<!-- 关键参数:坐标系 -->
<param name="base_frame" value="base_footprint"/><!--底盘坐标系-->
<param name="map_frame" value="map"/>
<param name="odom_frame" value="odom"/> <!--里程计坐标系-->
<param name="map_update_interval" value="5.0"/>
<param name="maxUrange" value="16.0"/>
<param name="sigma" value="0.05"/>
<param name="kernelSize" value="1"/>
<param name="lstep" value="0.05"/>
<param name="astep" value="0.05"/>
<param name="iterations" value="5"/>
<param name="lsigma" value="0.075"/>
<param name="ogain" value="3.0"/>
<param name="lskip" value="0"/>
<param name="srr" value="0.1"/>
<param name="srt" value="0.2"/>
<param name="str" value="0.1"/>
<param name="stt" value="0.2"/>
<param name="linearUpdate" value="1.0"/>
<param name="angularUpdate" value="0.5"/>
<param name="temporalUpdate" value="3.0"/>
<param name="resampleThreshold" value="0.5"/>
<param name="particles" value="30"/>
<param name="xmin" value="-50.0"/>
<param name="ymin" value="-50.0"/>
<param name="xmax" value="50.0"/>
<param name="ymax" value="50.0"/>
<param name="delta" value="0.05"/>
<param name="llsamplerange" value="0.01"/>
<param name="llsamplestep" value="0.01"/>
<param name="lasamplerange" value="0.005"/>
<param name="lasamplestep" value="0.005"/>
</node>
<node pkg="joint_state_publisher" name="joint_state_publisher" type="joint_state_publisher" />
<node pkg="robot_state_publisher" name="robot_state_publisher" type="robot_state_publisher" />
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find nav_demo)/config/nav_test.rviz"/>
</launch>
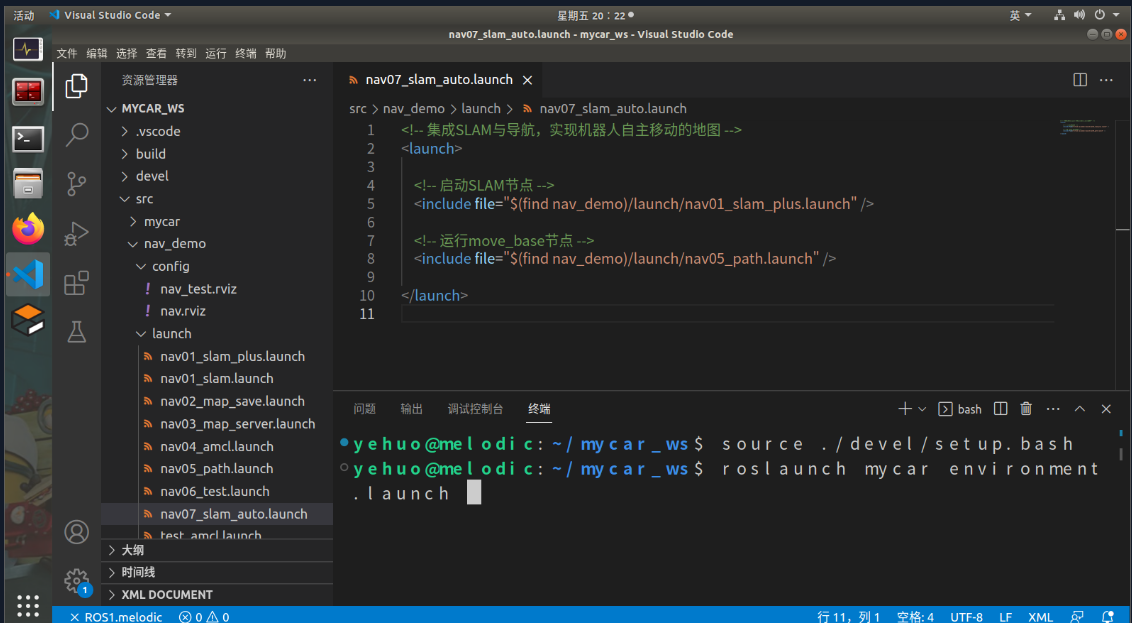
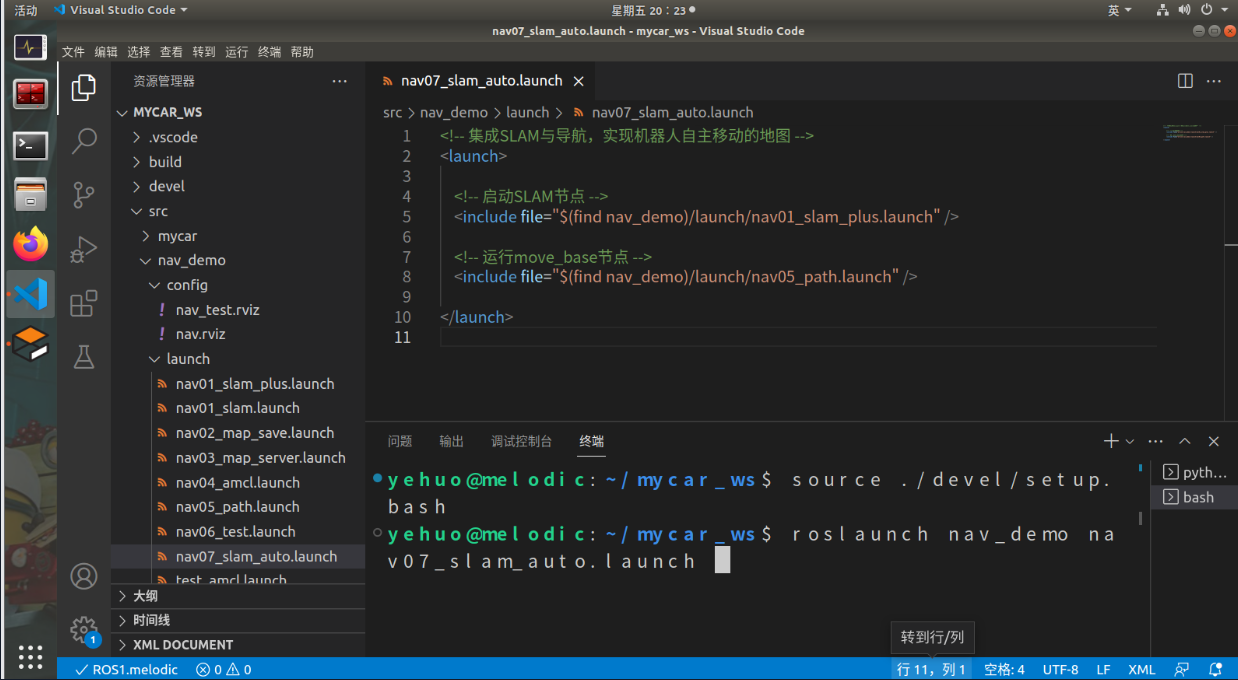
mycar_ws/src/nav_demo/launch/nav07_slam_auto.launch
<!-- 集成SLAM与导航,实现机器人自主移动的地图 -->
<launch>
<!-- 启动SLAM节点 -->
<include file="$(find nav_demo)/launch/nav01_slam_plus.launch" />
<!-- 运行move_base节点 -->
<include file="$(find nav_demo)/launch/nav05_path.launch" />
</launch>
编译+启动 gazebo 仿真环境
source ./devel/setup.bash
roslaunch mycar environment.launch
编译+启动 rviz
source ./devel/setup.bash
roslaunch nav_demo nav06_test.launch

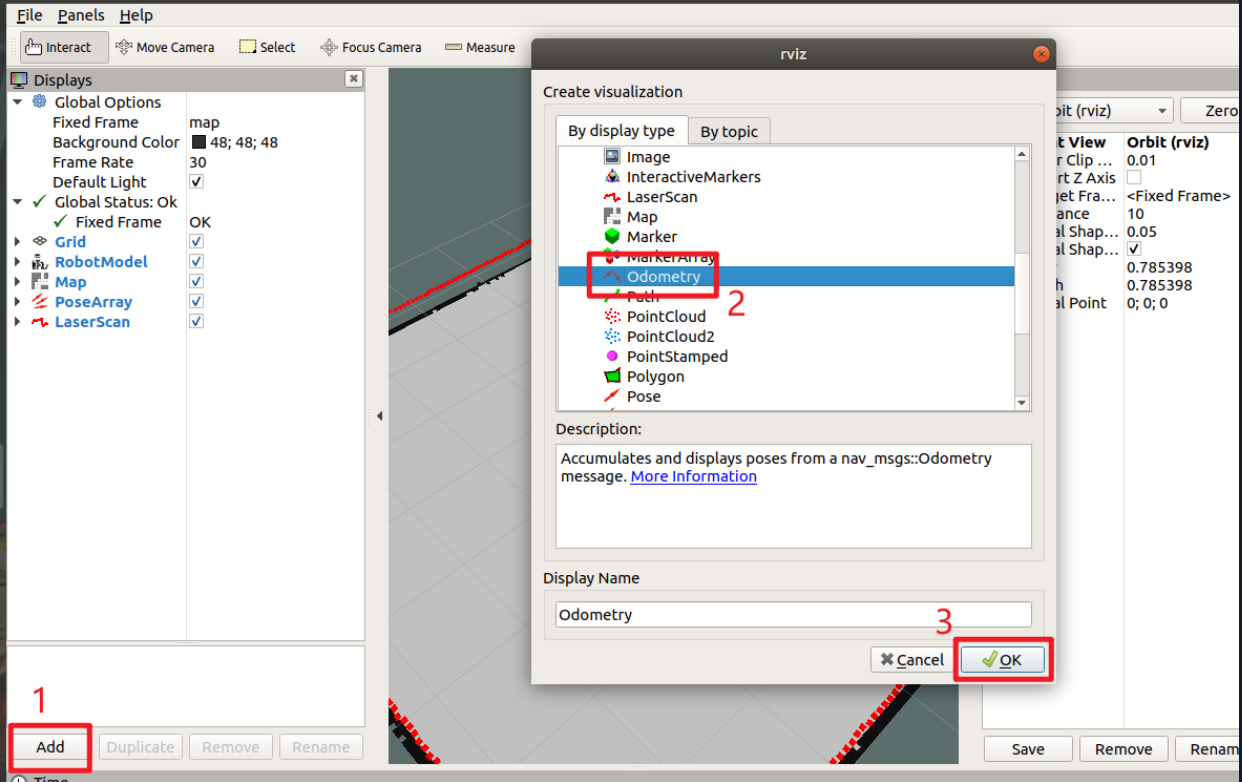
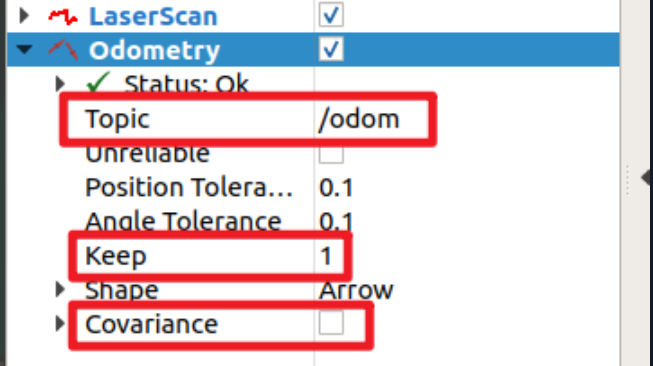
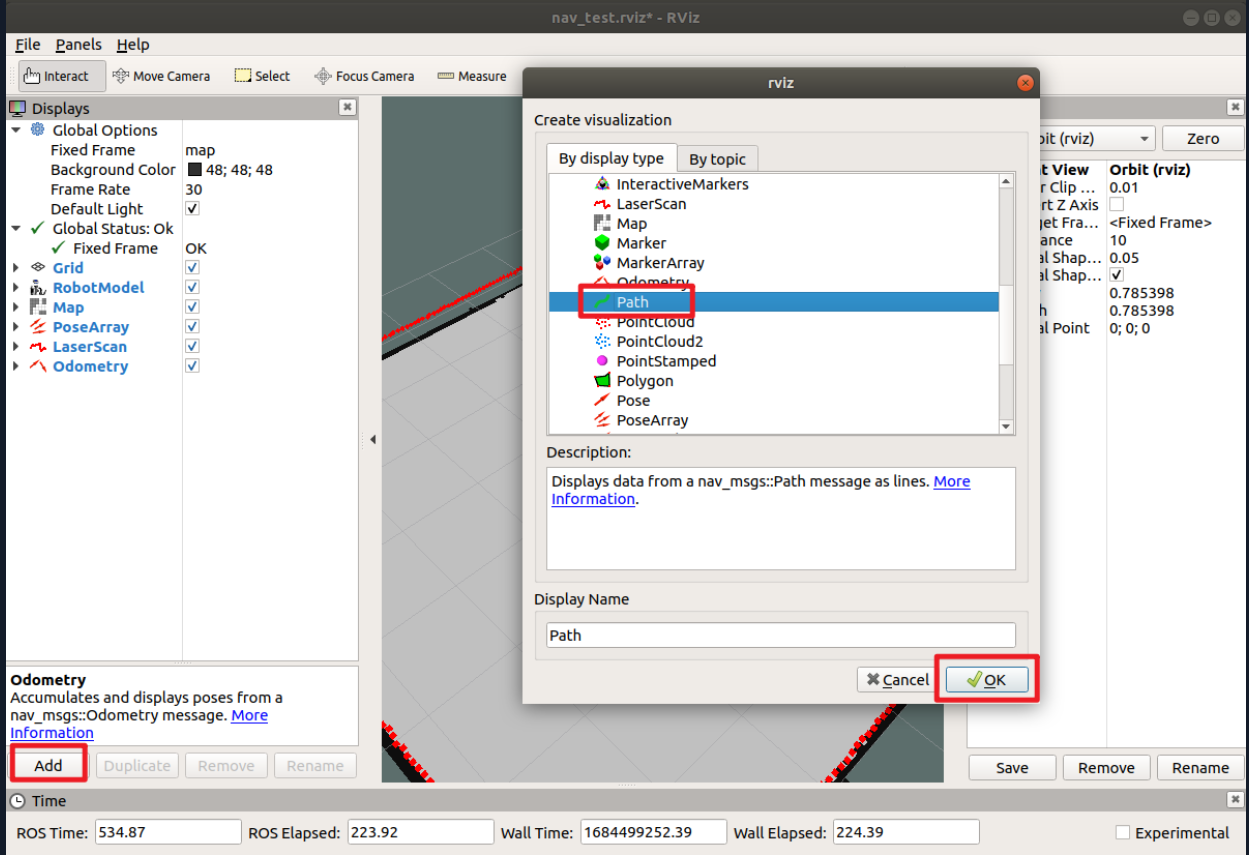
配置 rviz
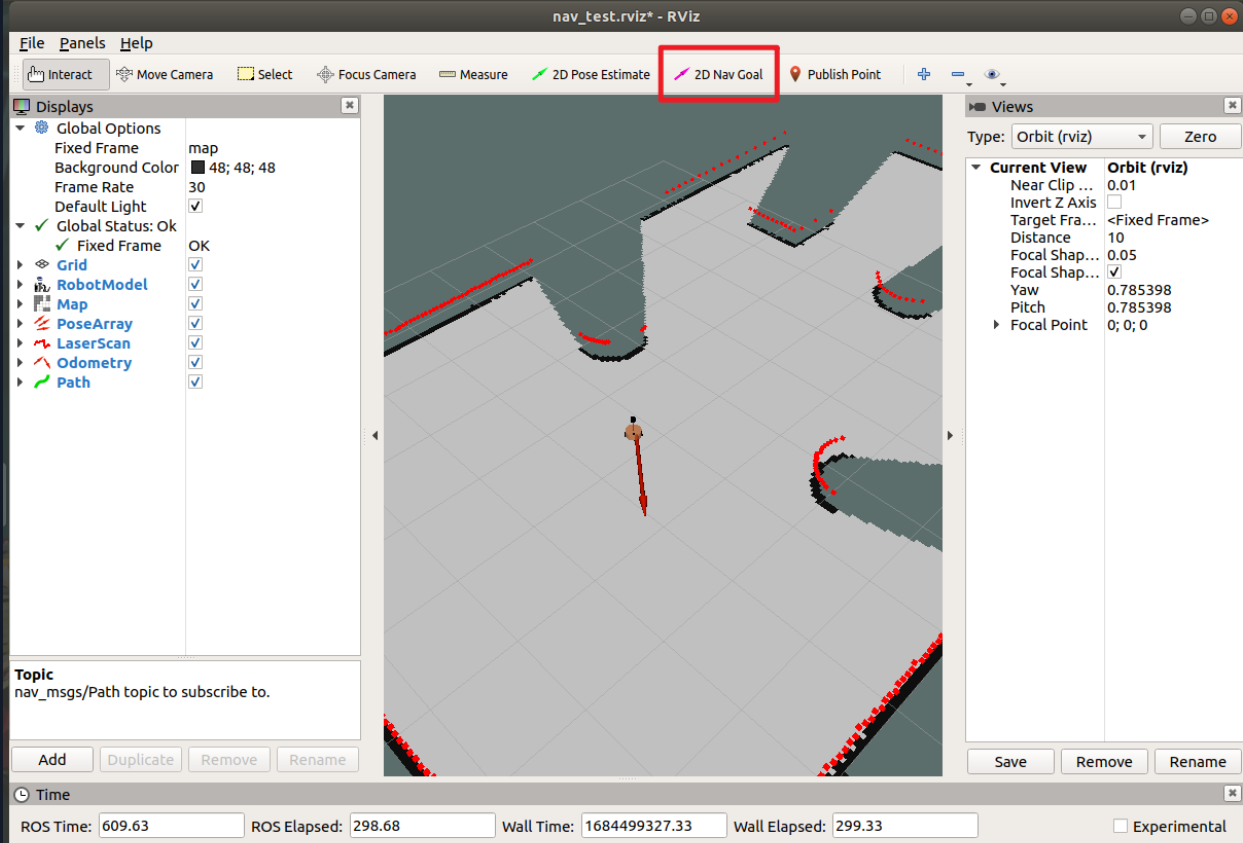
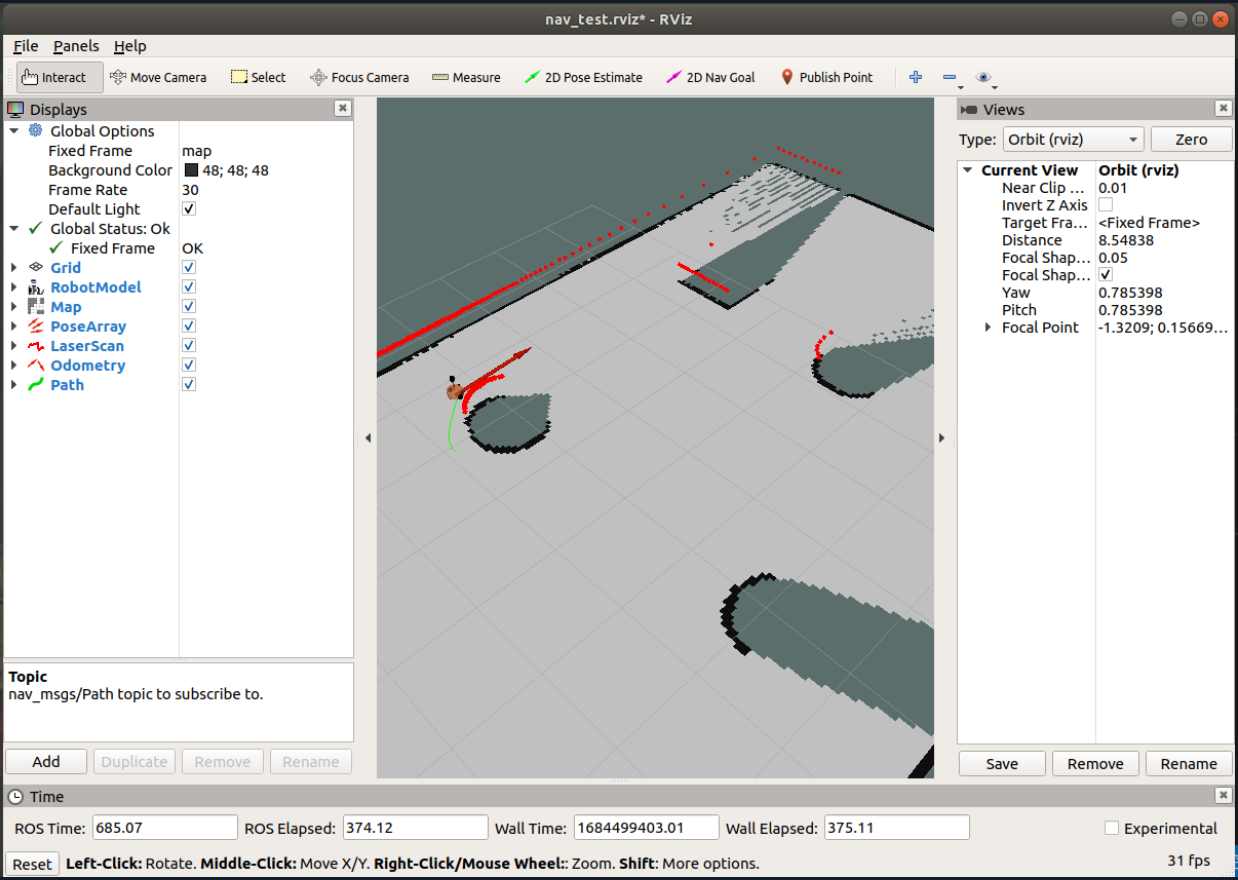
运行测试

基于机器人自主移动实现SLAM建图的更多相关文章
- SLAM+语音机器人DIY系列:(六)SLAM建图与自主避障导航——2.google-cartographer机器人SLAM建图
摘要 通过前面的基础学习,本章进入最为激动的机器人自主导航的学习.在前面的学习铺垫后,终于迎来了最大乐趣的时刻,就是赋予我们的miiboo机器人能自由行走的生命.本章将围绕机器人SLAM建图.导航避障 ...
- cartographer环境建立以及建图测试(详细级)
- 机器人自主移动的秘密:实际应用中,SLAM究竟是如何实现的?(二)
博客转载自:https://www.leiphone.com/news/201612/FRzmoEI8Iud6CmT2.html 雷锋网(公众号:雷锋网)按:本文作者SLAMTEC(思岚科技公号sla ...
- 基于ros2 dashing的建图导航探索
基于ros2 dashing的建图导航探索 1. 环境准备 安装ros2 dashing, 参考链接: https://index.ros.org/doc/ros2/Installation/Dash ...
- 机器人自主移动的秘密,从SLAM技术说起(一)
博客转载自:https://www.leiphone.com/news/201609/c35bn1M9kgVaCCef.html 雷锋网(公众号:雷锋网)按:本文作者SLAMTEC(思岚科技公号sla ...
- 除了ROS ,机器人自主定位导航还能怎么做?
博客转载自:https://www.leiphone.com/news/201609/10QD7yp7JFV9H9Ni.html 雷锋网(公众号:雷锋网)按:本文作者科技剪刀手,思岚科技技术顾问. 随 ...
- 从零开始一起学习SLAM | 理解图优化,一步步带你看懂g2o代码
首发于公众号:计算机视觉life 旗下知识星球「从零开始学习SLAM」 这可能是最清晰讲解g2o代码框架的文章 理解图优化,一步步带你看懂g2o框架 小白:师兄师兄,最近我在看SLAM的优化算法,有种 ...
- 使用hector-slam和Kinect V1建图
一.建图实际操作 下载源码测试源码,depthimage_to_laserscan,参考https://blog.csdn.net/u010925447/article/details/5649468 ...
- ROS 八叉树地图构建 - 使用 octomap_server 建图过程总结!
构建语义地图时,最开始用的是 octomap_server,后面换成了 semantic_slam: octomap_generator,不过还是整理下之前的学习笔记. 一.增量构建八叉树地图步骤 为 ...
- TurtleBot3 Waffle (tx2版华夫)(9)建图-gmapping建图(A2雷达)
9.1. 说明 这一节我们来讲 Turtlebot3 的 SLAMSLAM(The Simultaneous Localization and Mapping) 同步定位与地图构建: 希望机器人从未知 ...
随机推荐
- Java笔记第二弹
List常用集合子类的特点 ArrayList底层数据结构是数组 查询快,增删慢 LinkedList底层数据结构是链表 查询慢,增删快 练习: //ArrayList实现 import java.u ...
- 如何使用Github创建一个仓库
创建仓库(对我来说,这是新建) 点击这里的Create repository: 进入到这样一个界面: 其中,Repository name,是我们即将创建完成的仓库名称: 而这里: 需要填写的是对仓库 ...
- Nacos与OpenFeign开发
目录 1.前言 2.生产者 3.消费者 4.扩展 1.前言 我的话是微服务B调用微服务A的controller层 2.生产者 微服务A请求接口如下: @GetMapping("/listUn ...
- Debiased Contrastive Learning of Unsupervised Sentence Representations 论文精读
1. 介绍(Introduction) 问题: 由PLM编码得到的句子表示在方向上分布不均匀, 在向量空间中占据一个狭窄的锥形区域, 这在很大程度上限制了它们的表达能力. 已有的解决办法: 对比学习. ...
- [灾备]独立磁盘阵列(RAID)技术
本文是对3个月前临时出差前往客户现场,安装交付我司大数据产品时使用的一项硬件级的灾备技术的简要复盘. 1 独立磁盘阵列--RAID:概述 1.1 定义 RAID := Redundant Arrays ...
- 太坑了吧!一次某某云上的redis读超时排查经历
一次排查某某云上的redis读超时经历 性能排查,服务监控方面的知识往往涉及量广且比较零散,如何较为系统化的分析和解决问题,建立其对性能排查,性能优化的思路,我将在这个系列里给出我的答案. 问题背景 ...
- vue-element-admin 动态菜单改造
vue-element-admin 动态菜单改造 vue-element-admin 是一款优秀后台前端解决方案,它基于 vue 和 element-ui实现.开源后台管理系统解决方案项目 Boot- ...
- Puppeteer+RabbitMQ:Node.js 批量加工pdf服务架构设计与落地
全文约8500字,阅读时长约10分钟. 智慧作业最近上线「个性化手册」(简称个册)功能,一份完整的个性化手册分为三部分: •学情分析:根据学生阶段性的学习和考试情况进行学情分析.归纳.总结,汇总学情数 ...
- 06-打包html资源
/** * loader:1. 下载 2. 使用(配置loader) * plugins:1. 下载 2. 引入 3. 使用 */ const { resolve } = require('path' ...
- Java的final修饰符
final 实例域 可以将实例域定义为 final.对于 final 域来说,构建对象时必须初始化 final 实例域,构造对象之后就不允许改变 final 实例域的值了.也就是说,必须确保在每一个构 ...