深度增强学习--A3C
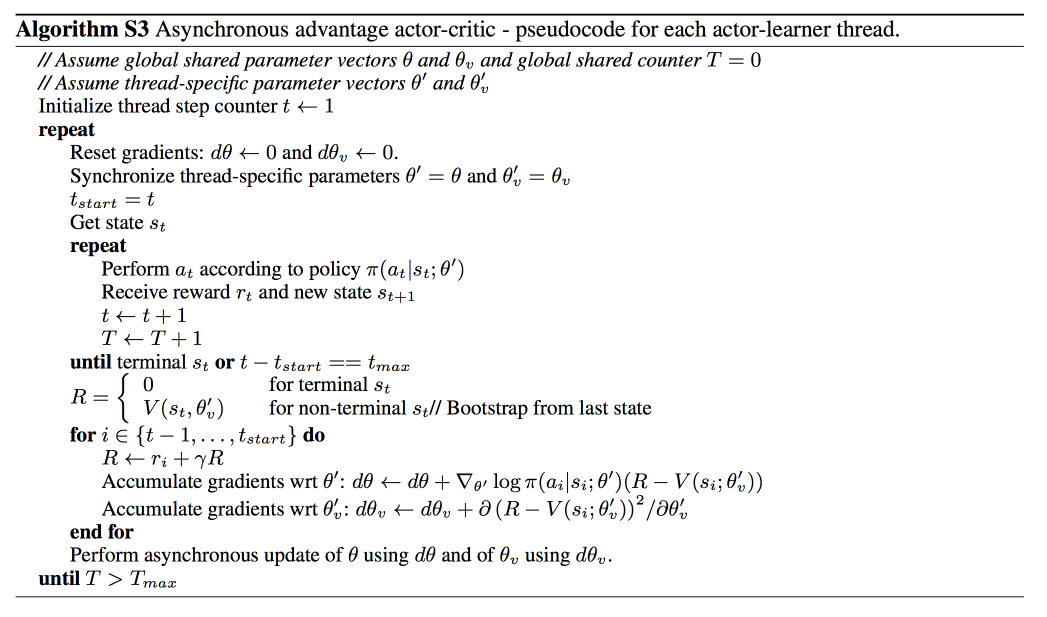
它会创建多个并行的环境, 让多个拥有副结构的 agent 同时在这些并行环境上更新主结构中的参数. 并行中的 agent 们互不干扰, 而主结构的参数更新受到副结构提交更新的不连续性干扰, 所以更新的相关性被降低, 收敛性提高
import threading
import numpy as np
import tensorflow as tf
import pylab
import time
import gym
from keras.layers import Dense, Input
from keras.models import Model
from keras.optimizers import Adam
from keras import backend as K # global variables for threading
episode = 0
scores = [] EPISODES = 2000 # This is A3C(Asynchronous Advantage Actor Critic) agent(global) for the Cartpole
# In this example, we use A3C algorithm
class A3CAgent:
def __init__(self, state_size, action_size, env_name):
# get size of state and action
self.state_size = state_size
self.action_size = action_size # get gym environment name
self.env_name = env_name # these are hyper parameters for the A3C
self.actor_lr = 0.001
self.critic_lr = 0.001
self.discount_factor = .99
self.hidden1, self.hidden2 = 24, 24
self.threads = 8 #8个线程并行 # create model for actor and critic network
self.actor, self.critic = self.build_model() # method for training actor and critic network
self.optimizer = [self.actor_optimizer(), self.critic_optimizer()] self.sess = tf.InteractiveSession()
K.set_session(self.sess)
self.sess.run(tf.global_variables_initializer()) # approximate policy and value using Neural Network
# actor -> state is input and probability of each action is output of network
# critic -> state is input and value of state is output of network
# actor and critic network share first hidden layer
def build_model(self):
state = Input(batch_shape=(None, self.state_size))
shared = Dense(self.hidden1, input_dim=self.state_size, activation='relu', kernel_initializer='glorot_uniform')(state) actor_hidden = Dense(self.hidden2, activation='relu', kernel_initializer='glorot_uniform')(shared)
action_prob = Dense(self.action_size, activation='softmax', kernel_initializer='glorot_uniform')(actor_hidden) value_hidden = Dense(self.hidden2, activation='relu', kernel_initializer='he_uniform')(shared)
state_value = Dense(1, activation='linear', kernel_initializer='he_uniform')(value_hidden) actor = Model(inputs=state, outputs=action_prob)
critic = Model(inputs=state, outputs=state_value) actor._make_predict_function()
critic._make_predict_function() actor.summary()
critic.summary() return actor, critic # make loss function for Policy Gradient
# [log(action probability) * advantages] will be input for the back prop
# we add entropy of action probability to loss
def actor_optimizer(self):
action = K.placeholder(shape=(None, self.action_size))
advantages = K.placeholder(shape=(None, )) policy = self.actor.output good_prob = K.sum(action * policy, axis=1)
eligibility = K.log(good_prob + 1e-10) * K.stop_gradient(advantages)
loss = -K.sum(eligibility) entropy = K.sum(policy * K.log(policy + 1e-10), axis=1) actor_loss = loss + 0.01*entropy optimizer = Adam(lr=self.actor_lr)
updates = optimizer.get_updates(self.actor.trainable_weights, [], actor_loss)
train = K.function([self.actor.input, action, advantages], [], updates=updates)
return train # make loss function for Value approximation
def critic_optimizer(self):
discounted_reward = K.placeholder(shape=(None, )) value = self.critic.output loss = K.mean(K.square(discounted_reward - value)) optimizer = Adam(lr=self.critic_lr)
updates = optimizer.get_updates(self.critic.trainable_weights, [], loss)
train = K.function([self.critic.input, discounted_reward], [], updates=updates)
return train # make agents(local) and start training
def train(self):
# self.load_model('./save_model/cartpole_a3c.h5')
agents = [Agent(i, self.actor, self.critic, self.optimizer, self.env_name, self.discount_factor,
self.action_size, self.state_size) for i in range(self.threads)]#建立8个local agent for agent in agents:
agent.start() while True:
time.sleep(20) plot = scores[:]
pylab.plot(range(len(plot)), plot, 'b')
pylab.savefig("./save_graph/cartpole_a3c.png") self.save_model('./save_model/cartpole_a3c.h5') def save_model(self, name):
self.actor.save_weights(name + "_actor.h5")
self.critic.save_weights(name + "_critic.h5") def load_model(self, name):
self.actor.load_weights(name + "_actor.h5")
self.critic.load_weights(name + "_critic.h5") # This is Agent(local) class for threading
class Agent(threading.Thread):
def __init__(self, index, actor, critic, optimizer, env_name, discount_factor, action_size, state_size):
threading.Thread.__init__(self) self.states = []
self.rewards = []
self.actions = [] self.index = index
self.actor = actor
self.critic = critic
self.optimizer = optimizer
self.env_name = env_name
self.discount_factor = discount_factor
self.action_size = action_size
self.state_size = state_size # Thread interactive with environment
def run(self):
global episode
env = gym.make(self.env_name)
while episode < EPISODES:
state = env.reset()
score = 0
while True:
action = self.get_action(state)
next_state, reward, done, _ = env.step(action)
score += reward self.memory(state, action, reward) state = next_state if done:
episode += 1
print("episode: ", episode, "/ score : ", score)
scores.append(score)
self.train_episode(score != 500)
break # In Policy Gradient, Q function is not available.
# Instead agent uses sample returns for evaluating policy
def discount_rewards(self, rewards, done=True):
discounted_rewards = np.zeros_like(rewards)
running_add = 0
if not done:
running_add = self.critic.predict(np.reshape(self.states[-1], (1, self.state_size)))[0]
for t in reversed(range(0, len(rewards))):
running_add = running_add * self.discount_factor + rewards[t]
discounted_rewards[t] = running_add
return discounted_rewards # save <s, a ,r> of each step
# this is used for calculating discounted rewards
def memory(self, state, action, reward):
self.states.append(state)
act = np.zeros(self.action_size)
act[action] = 1
self.actions.append(act)
self.rewards.append(reward) # update policy network and value network every episode
def train_episode(self, done):
discounted_rewards = self.discount_rewards(self.rewards, done) values = self.critic.predict(np.array(self.states))
values = np.reshape(values, len(values)) advantages = discounted_rewards - values self.optimizer[0]([self.states, self.actions, advantages])
self.optimizer[1]([self.states, discounted_rewards])
self.states, self.actions, self.rewards = [], [], [] def get_action(self, state):
policy = self.actor.predict(np.reshape(state, [1, self.state_size]))[0]
return np.random.choice(self.action_size, 1, p=policy)[0] if __name__ == "__main__":
env_name = 'CartPole-v1'
env = gym.make(env_name) state_size = env.observation_space.shape[0]
action_size = env.action_space.n env.close() global_agent = A3CAgent(state_size, action_size, env_name)
global_agent.train()
深度增强学习--A3C的更多相关文章
- 深度增强学习--DPPO
PPO DPPO介绍 PPO实现 代码DPPO
- 深度增强学习--DDPG
DDPG DDPG介绍2 ddpg输出的不是行为的概率, 而是具体的行为, 用于连续动作 (continuous action) 的预测 公式推导 推导 代码实现的gym的pendulum游戏,这个游 ...
- 深度增强学习--DQN的变形
DQN的变形 double DQN prioritised replay dueling DQN
- 深度增强学习--Actor Critic
Actor Critic value-based和policy-based的结合 实例代码 import sys import gym import pylab import numpy as np ...
- 深度增强学习--Policy Gradient
前面都是value based的方法,现在看一种直接预测动作的方法 Policy Based Policy Gradient 一个介绍 karpathy的博客 一个推导 下面的例子实现的REINFOR ...
- 深度增强学习--Deep Q Network
从这里开始换个游戏演示,cartpole游戏 Deep Q Network 实例代码 import sys import gym import pylab import random import n ...
- 常用增强学习实验环境 II (ViZDoom, Roboschool, TensorFlow Agents, ELF, Coach等) (转载)
原文链接:http://blog.csdn.net/jinzhuojun/article/details/78508203 前段时间Nature上发表的升级版Alpha Go - AlphaGo Ze ...
- 马里奥AI实现方式探索 ——神经网络+增强学习
[TOC] 马里奥AI实现方式探索 --神经网络+增强学习 儿时我们都曾有过一个经典游戏的体验,就是马里奥(顶蘑菇^v^),这次里约奥运会闭幕式,日本作为2020年东京奥运会的东道主,安倍最后也已经典 ...
- 增强学习 | AlphaGo背后的秘密
"敢于尝试,才有突破" 2017年5月27日,当今世界排名第一的中国棋手柯洁与AlphaGo 2.0的三局对战落败.该事件标志着最新的人工智能技术在围棋竞技领域超越了人类智能,借此 ...
随机推荐
- sql server 2008 R2无法连接127.0.0.1报错 Server error:40(错误:53)
在公司用sql server 2008 R2很好的,回家连接127.0.0.1就报错.sql server2008R2主机名和.都可以登录,连接127.0.0.1出错,在与 SQL Server 建立 ...
- 微信小程序实战篇-下拉刷新与加载更多
下拉刷新 实现下拉刷新目前能想到的有两种方式 1. 调用系统的API,系统有提供下拉刷新的API接口 2. 监听scroll-view,自定义下拉刷新,还记得scroll-view里面有一个binds ...
- [知识复习] C语言文件读写
文件打开 fopen() 返回FILE* 对象,如果打开失败返回NULL,错误代码存入errno中 FILE *fopen( const char * filename, const char * m ...
- JavaScript best practices JS最佳实践
JavaScript best practices JS最佳实践 0 简介 最佳实践起初比较棘手,但最终会让你发现这是非常明智之举. 1.合理命名方法及变量名,简洁且可读 var someItem = ...
- tmpfs文件系统
centos 7测试OK 创建挂载点,挂载 mkdir -p /run/testdirmount -nt tmpfs -o size=500m,mode=755 tmpfs /run/testdir
- cocos2d-x addImageAsync()异步加载资源成功之后的场景跳转问题
http://blog.csdn.net/w20175357/article/details/23546985 1.先说说addImageAsync()异步加载图片的问题 做游戏的时候现在资源的比较大 ...
- POJ 2777 Count Color(线段树 + 染色问题)
传送门:Count Color Description Chosen Problem Solving and Program design as an optional course, you are ...
- 0822JDBC--Java连接数据库
JDBC定义: JDBC全称: Java DataBase Connectivity 独立于特定数据管理系统, 通用的sql数据库存取和操作的公共接口, 是一种面向接口编程 JDB ...
- 0821Servlet基础
什么是servlet jsp页面的前身是servlet, 但是servlet和jsp是两个不同概念 servlet是运行在服务器端的一段程序, 是可以直接运行一段java后台代码 ...
- 删除元素(LintCode)
删除元素 给定一个数组和一个值,在原地删除与值相同的数字,返回新数组的长度. 元素的顺序可以改变,并且对新的数组不会有影响. 样例 给出一个数组 [0,4,4,0,0,2,4,4],和值 4 返回 4 ...