ROS(机器人URDF模型优化)
URDF模型

xacro优化后的URDF模型
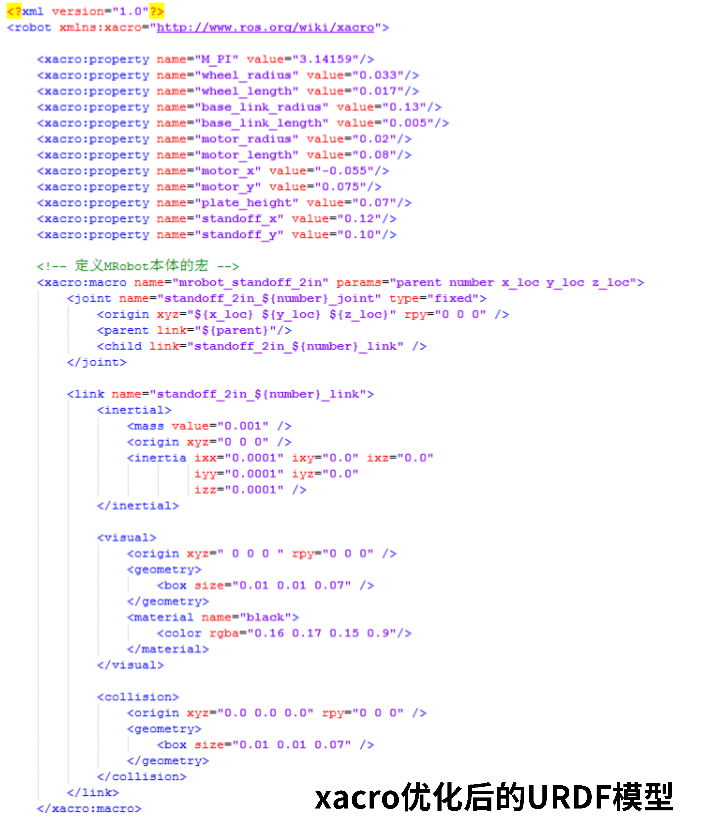
1.精简模型代码(创建宏定义,文件包含)
2.提供可编程接口(常量,变量,数学计算,条件语句)
常量定义:

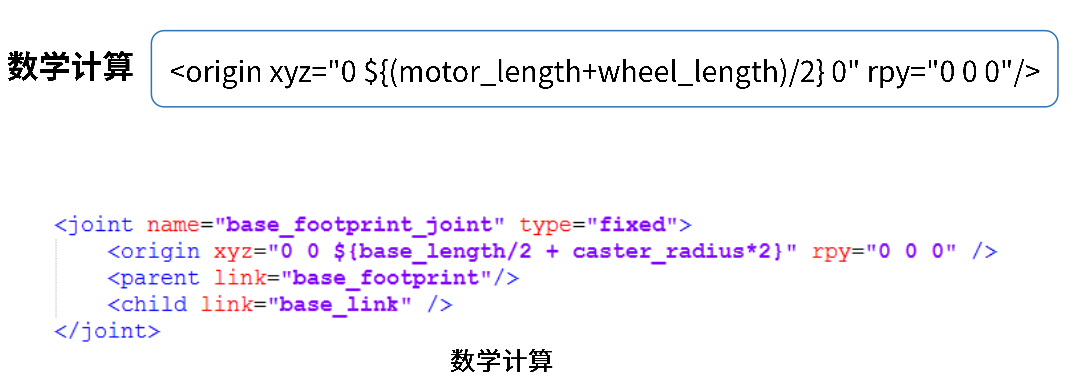
name:base_length的值value定义为0.16,之后被使用:$(base_length/2 + caster_radius*2)。
数学计算:
宏定义:
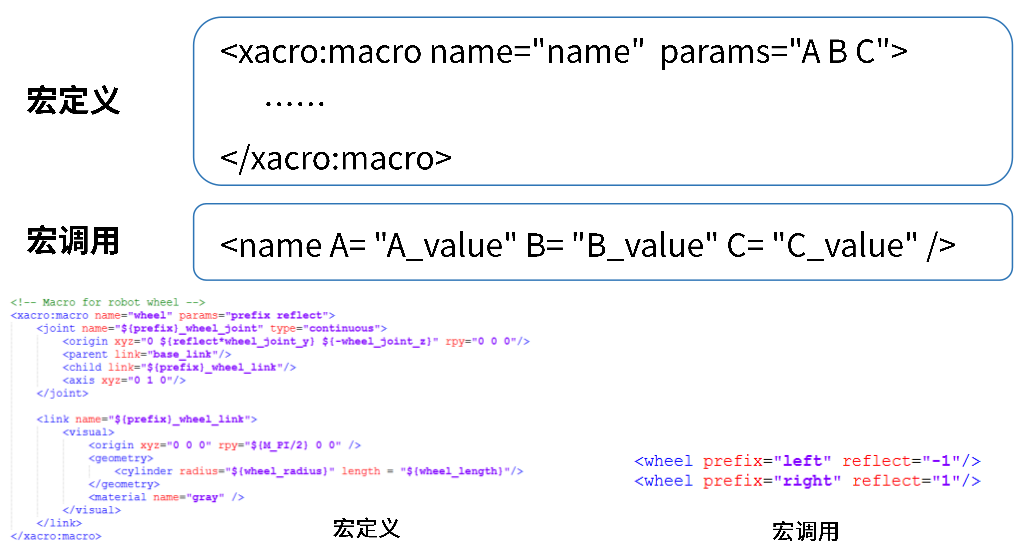
其中宏定义params = "prefix reflect",宏调用prefix = "left" reflect = "-1"。
文件包含:

xacro文件支持文件包含。
优化后的xacro文件(mbot_base.xacro)
<?xml version="1.0"?>
<robot name="mbot" xmlns:xacro="http://www.ros.org/wiki/xacro"> <!-- PROPERTY LIST -->
<xacro:property name="M_PI" value="3.1415926"/>
<xacro:property name="base_radius" value="0.20"/>
<xacro:property name="base_length" value="0.16"/> <xacro:property name="wheel_radius" value="0.06"/>
<xacro:property name="wheel_length" value="0.025"/>
<xacro:property name="wheel_joint_y" value="0.19"/>
<xacro:property name="wheel_joint_z" value="0.05"/> <xacro:property name="caster_radius" value="0.015"/> <!-- wheel_radius - ( base_length/2 - wheel_joint_z) -->
<xacro:property name="caster_joint_x" value="0.18"/> <!-- Defining the colors used in this robot -->
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material>
<material name="gray">
<color rgba="0.75 0.75 0.75 1"/>
</material> <!-- Macro for robot wheel -->
<xacro:macro name="wheel" params="prefix reflect">
<joint name="${prefix}_wheel_joint" type="continuous">
<origin xyz="0 ${reflect*wheel_joint_y} ${-wheel_joint_z}" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="${prefix}_wheel_link"/>
<axis xyz="0 1 0"/>
</joint> <link name="${prefix}_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0" />
<geometry>
<cylinder radius="${wheel_radius}" length = "${wheel_length}"/>
</geometry>
<material name="gray" />
</visual>
</link>
</xacro:macro> <!-- Macro for robot caster -->
<xacro:macro name="caster" params="prefix reflect"><!-- 宏定义 -->
<joint name="${prefix}_caster_joint" type="continuous">
<origin xyz="${reflect*caster_joint_x} 0 ${-(base_length/2 + caster_radius)}" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="${prefix}_caster_link"/>
<axis xyz="0 1 0"/>
</joint> <link name="${prefix}_caster_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="${caster_radius}" />
</geometry>
<material name="black" />
</visual>
</link>
</xacro:macro> <xacro:macro name="mbot_base">
<link name="base_footprint">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="0.001 0.001 0.001" />
</geometry>
</visual>
</link> <joint name="base_footprint_joint" type="fixed">
<origin xyz="0 0 ${base_length/2 + caster_radius*2}" rpy="0 0 0" />
<parent link="base_footprint"/>
<child link="base_link" />
</joint> <link name="base_link">
<visual>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="${base_length}" radius="${base_radius}"/>
</geometry>
<material name="yellow" />
</visual>
</link> <wheel prefix="left" reflect="-1"/>
<wheel prefix="right" reflect="1"/> <caster prefix="front" reflect="-1"/>
<caster prefix="back" reflect="1"/>
</xacro:macro>
</robot>
不过还需要一个上层文件(mbot.xacro),以上文件只相当于一个类文件。
<?xml version="1.0"?>
<robot name="arm" xmlns:xacro="http://www.ros.org/wiki/xacro"> <xacro:include filename="$(find mbot_description)/urdf/xacro/mbot_base.xacro" /> <mbot_base/> </robot>
为什么要有上层文件?可将机器人底盘作为一个零部件,一个宏定义。
模型显示:
1.将xacro文件转换为URDF文件

生成mbot.urdf文件。
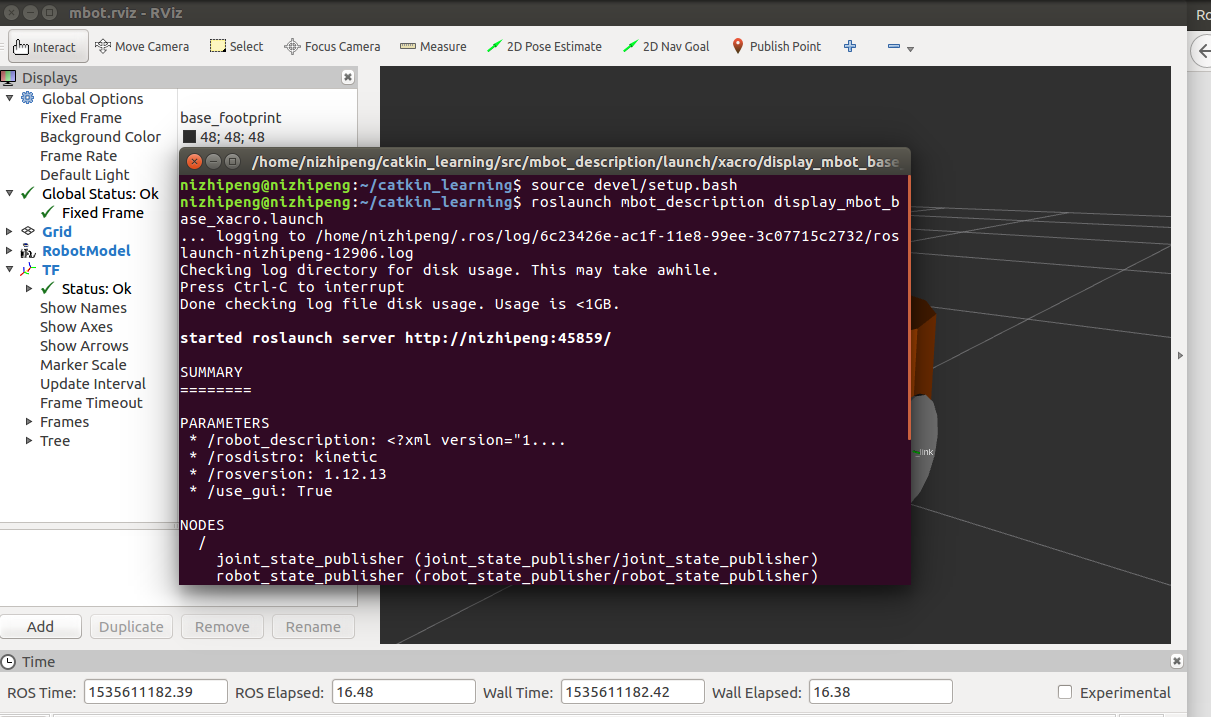
2.直接调用xacro文件解析器
在display_mbot_base_xacro.launch文件中直接写入解析器

将mbot.xacro 的解析结果放入robot_description参数中去。
<launch>
<arg name="model" default="$(find xacro)/xacro --inorder '$(find mbot_description)/urdf/xacro/mbot.xacro'" />
<arg name="gui" default="true" /> <param name="robot_description" command="$(arg model)" /> <!-- 设置GUI参数,显示关节控制插件 -->
<param name="use_gui" value="$(arg gui)"/> <!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" /> <!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" /> <!-- 运行rviz可视化界面 -->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find mbot_description)/config/mbot.rviz" required="true" /> </launch>
运行
ROS(机器人URDF模型优化)的更多相关文章
- ROS机器人程序设计(原书第2版)补充资料 (柒) 第七章 3D建模与仿真 urdf Gazebo V-Rep Webots Morse
ROS机器人程序设计(原书第2版)补充资料 (柒) 第七章 3D建模与仿真 urdf Gazebo V-Rep Webots Morse 书中,大部分出现hydro的地方,直接替换为indigo或ja ...
- ROSCon 2016视频和幻灯片发布 ROS机器人操作系统重要参考资料
ROSCon 2016视频和幻灯片发布 By Tully Foote on 十月19,2016 7:28 AM 全部PPT下载地址:http://pan.baidu.com/s/1gf2sn2F RO ...
- ROS机器人操作系统相关书籍、资料和学习路径
作者:Top Liu链接:https://zhuanlan.zhihu.com/p/30391098来源:知乎著作权归作者所有.商业转载请联系作者获得授权,非商业转载请注明出处. 本文是易科机器人实验 ...
- ros机器人开发概述
1. ROS项目开发流程? 参照古月大神写的ROS探索总结系列:http://blog.exbot.net/archives/619 具体项目设计可看看<程序员>杂志的最新一篇 ...
- ROS机器人程序设计(原书第2版)补充资料 教学大纲
ROS机器人程序设计(原书第2版) 补充资料 教学大纲 针对该书稍后会补充教学大纲.教案.多媒体课件以及练习题等. <ROS机器人程序设计>课程简介 课程编号:XXXXXX 课程名称:RO ...
- 星火计划ROS机器人Spark
星火计划ROS机器人Spark 1 http://wiki.ros.org/Robots/Spark 2 https://github.com/NXROBO/spark ---- Spark Spar ...
- ROS机器人程序设计(原书第2版)补充资料 (拾) 第十章 使用MoveIt!
ROS机器人程序设计(原书第2版)补充资料 (拾) 第十章 使用MoveIt! 书中,大部分出现hydro的地方,直接替换为indigo或jade或kinetic,即可在对应版本中使用. MoveIt ...
- ROS机器人程序设计(原书第2版)学习镜像分享及使用说明
ROS机器人程序设计(原书第2版)学习镜像分享及使用说明 系统用于ROS爱好者学习交流,也可用于其他用途,并不局限于ROS. 这款镜像文件是基于一年前的Ubuntu ROS Arduino Gazeb ...
- ROS机器人程序设计(原书第2版)补充资料 (捌) 第八章 导航功能包集入门 navigation
ROS机器人程序设计(原书第2版)补充资料 (捌) 第八章 导航功能包集入门 navigation 书中,大部分出现hydro的地方,直接替换为indigo或jade或kinetic,即可在对应版本中 ...
随机推荐
- 使用opencv3+python实现视频运动目标检测
本文主要实现了伯乐在线上的一个实践小项目,原文链接,用以巩固opencv视频操作知识内容.整个项目均有代码注释,通俗易懂,短短几十行就可以达到还算不错的实现效果,做起来成就感满满哒.打开编辑器,一起来 ...
- sdc-docker
ssh root@109.105.7.96 sdc-login docker /opt/smartdc/docker ls /var/svc/log/ cat smartdc-application- ...
- tomcat服务编码集设置
有三处需要记住修改 截图如下效果图: 第一处,对控制台右键,选择“默认值”找到,并设置为gbk: 第二处,在conf中找到server.xml文件并设置: 第三处:找到bin文件,找到tomcat80 ...
- 转载《spring定时任务轮询(spring Task)》
亲测可用 原文网址:http://blog.csdn.net/wanglha/article/details/51026697 本博主注:xmlns:task="http://www.spr ...
- libevent 简单学习
//NetworkManager.h #ifndef _NET_WORK_MANAGER_ #define _NET_WORK_MANAGER_ #include "event2/util. ...
- [SoapUI]怎样保存response到本地文件夹
def myOutFile = "D:/AUS/Aspect Huntley feed URLs/Automation Save Responses/ahresearch.xml" ...
- Java 设计模式系列(十五)观察者模式(Observer)
Java 设计模式系列(十五)观察者模式(Observer) Java 设计模式系列目录(https://www.cnblogs.com/binarylei/p/10198698.html) Java ...
- GCT英语口语复试中的常见问题总汇
英语口语复试中常见的问题: 1. Where do you come from? 2. What kind of landscape surrounds your hometown? 3. What ...
- 微信小程序 tp5上传图片
test.wxml页面 <view class="title">请选择要反馈的问题</view> <view> <picker bindc ...
- swift学习之UITabelView ----UITableViewCell
// // OneViewController.swift // tab // // Created by su on 15/12/7. // Copyright © 2015年 tian. ...