Kinect For Windows V2开发日志九:侦测并绘制人体骨架
# 简介
在上一篇[《侦测、追踪人体骨架》](http://www.cnblogs.com/xz816111/p/5187424.html)里,介绍了关节点的使用办法,这一篇记录将关节点与`OpenCV`结合的绘图方法。
代码
#include <iostream>
#include <opencv2\imgproc.hpp>
#include <opencv2\calib3d.hpp>
#include <opencv2\highgui.hpp>
#include <Kinect.h>
using namespace std;
using namespace cv;
void draw(Mat & img, Joint & r_1, Joint & r_2, ICoordinateMapper * myMapper);
int main(void)
{
IKinectSensor * mySensor = nullptr;
GetDefaultKinectSensor(&mySensor);
mySensor->Open();
IColorFrameSource * myColorSource = nullptr;
mySensor->get_ColorFrameSource(&myColorSource);
IColorFrameReader * myColorReader = nullptr;
myColorSource->OpenReader(&myColorReader);
int colorHeight = 0, colorWidth = 0;
IFrameDescription * myDescription = nullptr;
myColorSource->get_FrameDescription(&myDescription);
myDescription->get_Height(&colorHeight);
myDescription->get_Width(&colorWidth);
IColorFrame * myColorFrame = nullptr;
Mat original(colorHeight, colorWidth, CV_8UC4);
//**********************以上为ColorFrame的读取前准备**************************
IBodyFrameSource * myBodySource = nullptr;
mySensor->get_BodyFrameSource(&myBodySource);
IBodyFrameReader * myBodyReader = nullptr;
myBodySource->OpenReader(&myBodyReader);
int myBodyCount = 0;
myBodySource->get_BodyCount(&myBodyCount);
IBodyFrame * myBodyFrame = nullptr;
ICoordinateMapper * myMapper = nullptr;
mySensor->get_CoordinateMapper(&myMapper);
//**********************以上为BodyFrame以及Mapper的准备***********************
while (1)
{
while (myColorReader->AcquireLatestFrame(&myColorFrame) != S_OK);
myColorFrame->CopyConvertedFrameDataToArray(colorHeight * colorWidth * 4, original.data, ColorImageFormat_Bgra);
Mat copy = original.clone(); //读取彩色图像并输出到矩阵
while (myBodyReader->AcquireLatestFrame(&myBodyFrame) != S_OK); //读取身体图像
IBody ** myBodyArr = new IBody *[myBodyCount]; //为存身体数据的数组做准备
for (int i = 0; i < myBodyCount; i++)
myBodyArr[i] = nullptr;
if (myBodyFrame->GetAndRefreshBodyData(myBodyCount, myBodyArr) == S_OK) //把身体数据输入数组
for (int i = 0; i < myBodyCount; i++)
{
BOOLEAN result = false;
if (myBodyArr[i]->get_IsTracked(&result) == S_OK && result) //先判断是否侦测到
{
Joint myJointArr[JointType_Count];
if (myBodyArr[i]->GetJoints(JointType_Count, myJointArr) == S_OK) //如果侦测到就把关节数据输入到数组并画图
{
draw(copy, myJointArr[JointType_Head], myJointArr[JointType_Neck], myMapper);
draw(copy, myJointArr[JointType_Neck], myJointArr[JointType_SpineShoulder], myMapper);
draw(copy, myJointArr[JointType_SpineShoulder], myJointArr[JointType_ShoulderLeft], myMapper);
draw(copy, myJointArr[JointType_SpineShoulder], myJointArr[JointType_SpineMid], myMapper);
draw(copy, myJointArr[JointType_SpineShoulder], myJointArr[JointType_ShoulderRight], myMapper);
draw(copy, myJointArr[JointType_ShoulderLeft], myJointArr[JointType_ElbowLeft], myMapper);
draw(copy, myJointArr[JointType_SpineMid], myJointArr[JointType_SpineBase], myMapper);
draw(copy, myJointArr[JointType_ShoulderRight], myJointArr[JointType_ElbowRight], myMapper);
draw(copy, myJointArr[JointType_ElbowLeft], myJointArr[JointType_WristLeft], myMapper);
draw(copy, myJointArr[JointType_SpineBase], myJointArr[JointType_HipLeft], myMapper);
draw(copy, myJointArr[JointType_SpineBase], myJointArr[JointType_HipRight], myMapper);
draw(copy, myJointArr[JointType_ElbowRight], myJointArr[JointType_WristRight], myMapper);
draw(copy, myJointArr[JointType_WristLeft], myJointArr[JointType_ThumbLeft], myMapper);
draw(copy, myJointArr[JointType_WristLeft], myJointArr[JointType_HandLeft], myMapper);
draw(copy, myJointArr[JointType_HipLeft], myJointArr[JointType_KneeLeft], myMapper);
draw(copy, myJointArr[JointType_HipRight], myJointArr[JointType_KneeRight], myMapper);
draw(copy, myJointArr[JointType_WristRight], myJointArr[JointType_ThumbRight], myMapper);
draw(copy, myJointArr[JointType_WristRight], myJointArr[JointType_HandRight], myMapper);
draw(copy, myJointArr[JointType_HandLeft], myJointArr[JointType_HandTipLeft], myMapper);
draw(copy, myJointArr[JointType_KneeLeft], myJointArr[JointType_FootLeft], myMapper);
draw(copy, myJointArr[JointType_KneeRight], myJointArr[JointType_FootRight], myMapper);
draw(copy, myJointArr[JointType_HandRight], myJointArr[JointType_HandTipRight], myMapper);
}
}
}
delete[]myBodyArr;
myBodyFrame->Release();
myColorFrame->Release();
imshow("TEST", copy);
if (waitKey(30) == VK_ESCAPE)
break;
}
myMapper->Release();
myDescription->Release();
myColorReader->Release();
myColorSource->Release();
myBodyReader->Release();
myBodySource->Release();
mySensor->Close();
mySensor->Release();
return 0;
}
void draw(Mat & img, Joint & r_1, Joint & r_2, ICoordinateMapper * myMapper)
{
//用两个关节点来做线段的两端,并且进行状态过滤
if (r_1.TrackingState == TrackingState_Tracked && r_2.TrackingState == TrackingState_Tracked)
{
ColorSpacePoint t_point; //要把关节点用的摄像机坐标下的点转换成彩色空间的点
Point p_1, p_2;
myMapper->MapCameraPointToColorSpace(r_1.Position, &t_point);
p_1.x = t_point.X;
p_1.y = t_point.Y;
myMapper->MapCameraPointToColorSpace(r_2.Position, &t_point);
p_2.x = t_point.X;
p_2.y = t_point.Y;
line(img, p_1, p_2, Vec3b(0, 255, 0), 5);
circle(img, p_1, 10, Vec3b(255, 0, 0), -1);
circle(img, p_2, 10, Vec3b(255, 0, 0), -1);
}
}
详细说明
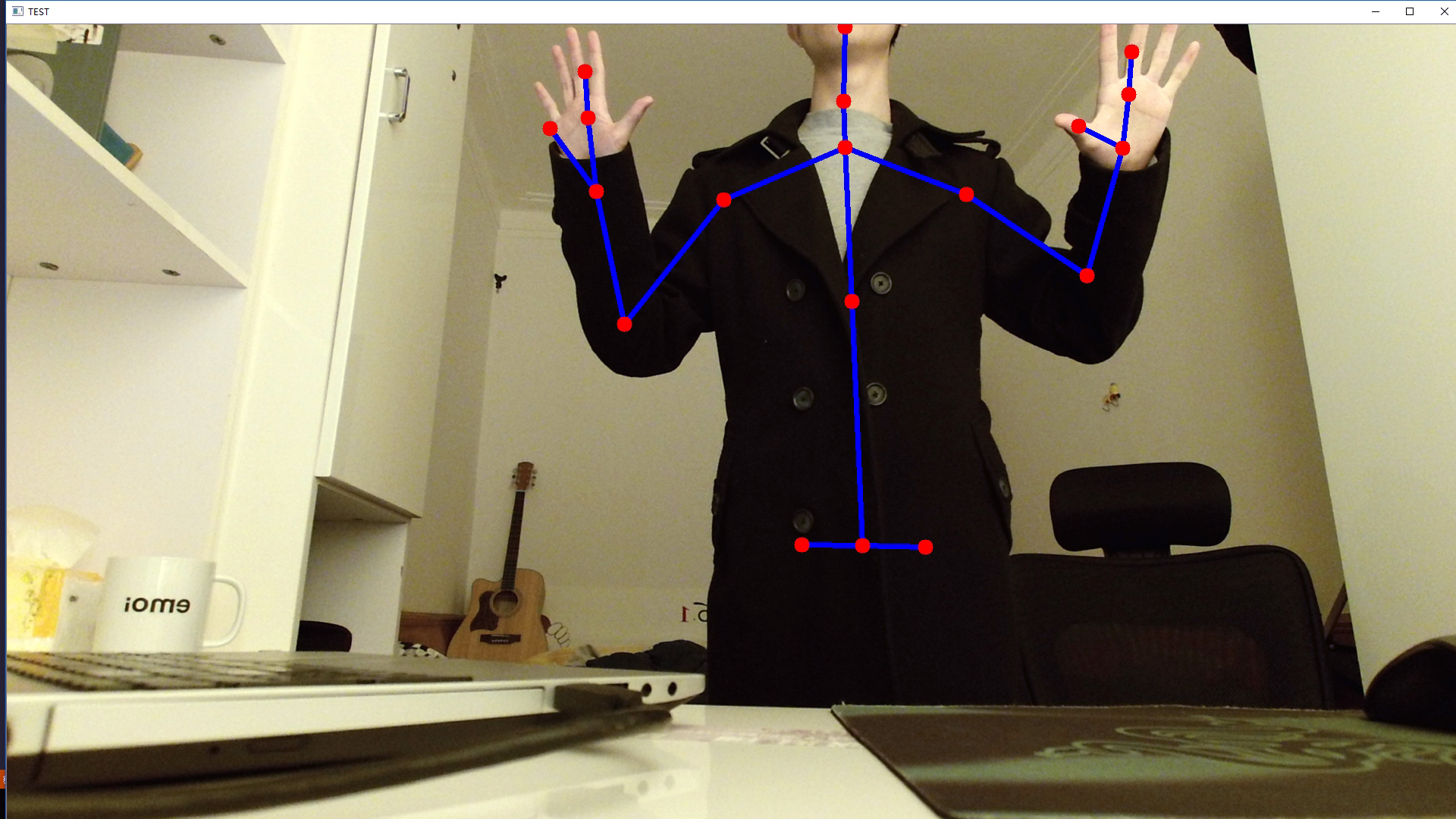
不难发现代码跟前面一篇非常类似,不同的地方就在于绘图部分。首先要将关节点用的CameraSpace转换到ColorSpace,这一操作可以借助ICoordinateMapper完成,然后就用两个关节点来作为线段的两端画线。这里采用了广度优先的办法,从上到下一层一层选取关节点。
效果图
Kinect For Windows V2开发日志九:侦测并绘制人体骨架的更多相关文章
- Kinect For Windows V2开发日志八:侦测、追踪人体骨架
简介 Kinect一个很强大的功能就是它可以侦测到人体的骨骼信息并追踪,在Kinect V2的SDK 2.0中,它最多可以同时获取到6个人.每个人25个关节点的信息,并且通过深度摄像头,可以同时获取到 ...
- Kinect For Windows V2开发日志一:开发环境的配置
算是正式进军Kinect了,前段时间学的东西现在就忘了,于是从此开始记录一下. 目前为止大部分的学习资料来自于Heresy的博客,写的非常优秀,清晰明了,十分感谢.开发语言为C++,应该会一直使用,但 ...
- Kinect For Windows V2开发日志六:人体的轮廓的表示
Kinect中带了一种数据源,叫做BodyIndex,简单来说就是它利用深度摄像头识别出最多6个人体,并且用数据将属于人体的部分标记,将人体和背景区别开来.利用这一特性,就可以在环境中显示出人体的轮廓 ...
- Kinect For Windows V2开发日志五:使用OpenCV显示彩色图像及红外图像
彩色图像 #include <iostream> #include <Kinect.h> #include <opencv2\highgui.hpp> using ...
- Kinect For Windows V2开发日志七:照片合成与背景消除
上一篇里讲到了Kinect可以从环境中区分出人体来.因此可以利用这个功能,来把摄像头前的人合成进照片里,和利用Photoshop不同的是,这样合成进去的人是动态且实时的. 简单的思路 BodyInde ...
- Kinect For Windows V2开发日志四:使用OpenCV显示深度图像
代码示例: #include <Kinect.h> #include <iostream> #include <opencv2\highgui.hpp> using ...
- Kinect For Windows V2开发日志三:简单的深度读取
代码示例: #include <Kinect.h> #include <iostream> using namespace std; int main(void) { IKin ...
- Kinect For Windows V2开发日志二:Kinect V2的基本参数
以下内容节选自Heresy的博客: 彩色影像:1920 x 1080 @ 30 / 15 FPS(根据环境亮度) 深度影像:512 x 424 @ 30 FPS.16bit 距离值(mm).可侦测 ...
- Kinect for Windows V2开发教程
教程 https://blog.csdn.net/openbug/article/details/80921437 Windows版Kinect SDK https://docs.microsoft. ...
随机推荐
- 支付宝修改回调地址后 issign=false
原因: verifyReturn 拼接url的时候,php自动添加了url参数,而url是本不需要的,所以导致md5对比出错. 修改 alipay_notify.class.php 77行的函数 ...
- 功能强大支持64位操作系统的转Flash软件(doc转swf):Print2Flash
Print2Flash是一个虚拟打印机类的文档转换软件,因此只要是可打印的文档,都可以轻松转换为Flash文件,即SWF动画,特别是用于转换PDF.Word.Excel.PowerPoint等文档为S ...
- Oracle中decode方法的作用
DECODE(条件,值1,翻译值1,值2,翻译值2,...值n,翻译值n,缺省值) 该函数含义如下: IF 条件=值1 THEN RETURN (翻译值1) ELSIF 条件=值2 THEN ...
- C#利用SharpZipLib解压或压缩文件夹实例操作
最近要做一个项目涉及到C#中压缩与解压缩的问题的解决方法,大家分享. 这里主要解决文件夹包含文件夹的解压缩问题. )下载SharpZipLib.dll,在http://www.icsharpcode. ...
- 使用Android Studio与ArcGIS Android SDK的开发环境部署和HelloWorld
android studio(以下简称AS)是google推荐的android专用IDE,替代目前主流的eclipse,另外arcgis也把AS作为推荐的android IDE 本文不介绍androi ...
- JavaScript创建Map对象(转)
JavaScript 里面本身没有map对象,用JavaScript的Array来实现Map的数据结构. /* * MAP对象,实现MAP功能 * * 接口: * size() 获取MAP元素 ...
- Nazo解密游戏攻略
啊,终于腾出时间来玩这个游戏了,顺手写一下攻略吧…… 第0关:http://cafebabe.cc/nazo/ 第一关:第一关很简单 点一下就好了 http://cafebabe.cc/nazo/le ...
- Android 使用 TableLayout 布局拉伸宽度
转自:http://www.cnblogs.com/ghj1976/archive/2011/04/21/2023850.html 布局文件 <?xml version="1.0&qu ...
- 【原创】PostSharp入门笔记
最近写了一个抓取软件,用户反映软件偶尔会抛异常: 由于当时写代码时没有注意异常处理,大部分方法都没有写try…catch…finally的语句,所以很难找出异常是出在哪个地方,难道要为所有方法加上tr ...
- Gridview全选
1.js代码 <script language="javascript" type="text/javascript"> ...