压缩感知重构算法之SP算法python实现
压缩感知重构算法之OMP算法python实现
压缩感知重构算法之CoSaMP算法python实现
压缩感知重构算法之SP算法python实现
压缩感知重构算法之IHT算法python实现
压缩感知重构算法之OLS算法python实现
压缩感知重构算法之IRLS算法python实现
SP(subspace pursuit)算法是压缩感知中一种非常重要的贪婪算法,它有较快的计算速度和较好的重构概率,在实际中应用较多。本文给出了SP算法的python和matlab代码,以及完整的仿真过程。
参考文献:Dai W, Milenkovic O. Subspace pursuit for compressive sensing signal reconstruction[J]. Information Theory, IEEE Transactions on, 2009, 55(5): 2230-2249.
SP算法流程:
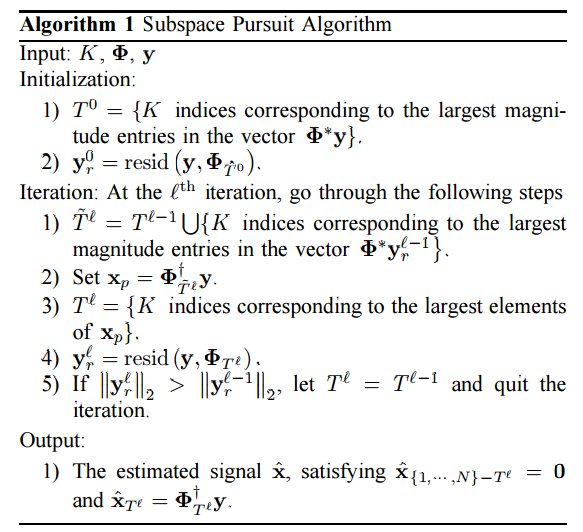
代码
要利用python实现,电脑必须安装以下程序
- python (本文用的python版本为3.5.1)
- numpy python包(本文用的版本为1.10.4)
- scipy python包(本文用的版本为0.17.0)
- pillow python包(本文用的版本为3.1.1)
另外需要下载lena图片放在和程序同一个目录下面
#coding:utf-8
#%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
# DCT基作为稀疏基,重建算法为SP算法 ,图像按列进行处理
# 参考文献: W. Dai and O. Milenkovic, “Subspace Pursuit for Compressive
# Sensing Signal Reconstruction,” 2009.
#%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
#导入集成库
import math
# 导入所需的第三方库文件
import numpy as np #对应numpy包
from PIL import Image #对应pillow包
#读取图像,并变成numpy类型的 array
im = np.array(Image.open('lena.bmp'))#图片大小256*256
#生成高斯随机测量矩阵
sampleRate=0.7 #采样率
Phi=np.random.randn(256*sampleRate,256)
#生成稀疏基DCT矩阵
mat_dct_1d=np.zeros((256,256))
v=range(256)
for k in range(0,256):
dct_1d=np.cos(np.dot(v,k*math.pi/256))
if k>0:
dct_1d=dct_1d-np.mean(dct_1d)
mat_dct_1d[:,k]=dct_1d/np.linalg.norm(dct_1d)
#随机测量
img_cs_1d=np.dot(Phi,im)
#SP算法函数
def cs_sp(y,D):
K=math.floor(y.shape[0]/3)
pos_last=np.array([],dtype=np.int64)
result=np.zeros((256))
product=np.fabs(np.dot(D.T,y))
pos_temp=product.argsort()
pos_temp=pos_temp[::-1]#反向,得到前面L个大的位置
pos_current=pos_temp[0:K]#初始化索引集 对应初始化步骤1
residual_current=y-np.dot(D[:,pos_current],np.dot(np.linalg.pinv(D[:,pos_current]),y))#初始化残差 对应初始化步骤2
while True: #迭代次数
product=np.fabs(np.dot(D.T,residual_current))
pos_temp=np.argsort(product)
pos_temp=pos_temp[::-1]#反向,得到前面L个大的位置
pos=np.union1d(pos_current,pos_temp[0:K])#对应步骤1
pos_temp=np.argsort(np.fabs(np.dot(np.linalg.pinv(D[:,pos]),y)))#对应步骤2
pos_temp=pos_temp[::-1]
pos_last=pos_temp[0:K]#对应步骤3
residual_last=y-np.dot(D[:,pos_last],np.dot(np.linalg.pinv(D[:,pos_last]),y))#更新残差 #对应步骤4
if np.linalg.norm(residual_last)>=np.linalg.norm(residual_current): #对应步骤5
pos_last=pos_current
break
residual_current=residual_last
pos_current=pos_last
result[pos_last[0:K]]=np.dot(np.linalg.pinv(D[:,pos_last[0:K]]),y) #对应输出步骤
return result
#重建
sparse_rec_1d=np.zeros((256,256)) # 初始化稀疏系数矩阵
Theta_1d=np.dot(Phi,mat_dct_1d) #测量矩阵乘上基矩阵
for i in range(256):
print('正在重建第',i,'列。。。')
column_rec=cs_sp(img_cs_1d[:,i],Theta_1d) #利用SP算法计算稀疏系数
sparse_rec_1d[:,i]=column_rec;
img_rec=np.dot(mat_dct_1d,sparse_rec_1d) #稀疏系数乘上基矩阵
#显示重建后的图片
image2=Image.fromarray(img_rec)
image2.show()
欢迎python爱好者加入:学习交流群 667279387
压缩感知重构算法之SP算法python实现的更多相关文章
- 压缩感知重构算法之IRLS算法python实现
压缩感知重构算法之OMP算法python实现 压缩感知重构算法之CoSaMP算法python实现 压缩感知重构算法之SP算法python实现 压缩感知重构算法之IHT算法python实现 压缩感知重构 ...
- 压缩感知重构算法之OLS算法python实现
压缩感知重构算法之OMP算法python实现 压缩感知重构算法之CoSaMP算法python实现 压缩感知重构算法之SP算法python实现 压缩感知重构算法之IHT算法python实现 压缩感知重构 ...
- 压缩感知重构算法之CoSaMP算法python实现
压缩感知重构算法之OMP算法python实现 压缩感知重构算法之CoSaMP算法python实现 压缩感知重构算法之SP算法python实现 压缩感知重构算法之IHT算法python实现 压缩感知重构 ...
- 压缩感知重构算法之IHT算法python实现
压缩感知重构算法之OMP算法python实现 压缩感知重构算法之CoSaMP算法python实现 压缩感知重构算法之SP算法python实现 压缩感知重构算法之IHT算法python实现 压缩感知重构 ...
- 压缩感知重构算法之OMP算法python实现
压缩感知重构算法之OMP算法python实现 压缩感知重构算法之CoSaMP算法python实现 压缩感知重构算法之SP算法python实现 压缩感知重构算法之IHT算法python实现 压缩感知重构 ...
- 压缩感知重构算法之子空间追踪(SP)
SP的提出时间比CoSaMP提出时间稍晚一些,但和压缩采样匹配追踪(CoSaMP)的方法几乎是一样的.SP与CoSaMP主要区别在于“In each iteration, in the SP algo ...
- 浅谈压缩感知(二十四):压缩感知重构算法之子空间追踪(SP)
主要内容: SP的算法流程 SP的MATLAB实现 一维信号的实验与结果 测量数M与重构成功概率关系的实验与结果 SP与CoSaMP的性能比较 一.SP的算法流程 压缩采样匹配追踪(CoSaMP)与子 ...
- 浅谈压缩感知(二十八):压缩感知重构算法之广义正交匹配追踪(gOMP)
主要内容: gOMP的算法流程 gOMP的MATLAB实现 一维信号的实验与结果 稀疏度K与重构成功概率关系的实验与结果 一.gOMP的算法流程 广义正交匹配追踪(Generalized OMP, g ...
- 浅谈压缩感知(二十五):压缩感知重构算法之分段正交匹配追踪(StOMP)
主要内容: StOMP的算法流程 StOMP的MATLAB实现 一维信号的实验与结果 门限参数Ts.测量数M与重构成功概率关系的实验与结果 一.StOMP的算法流程 分段正交匹配追踪(Stagewis ...
随机推荐
- Java设计模式之模板方法模式(Template)
前言: 我们在开发中有很多固定的流程,这些流程有很多步凑是固定的,比如JDBC中获取连接,关闭连接这些流程是固定不变的,变动的只有设置参数,解析结果集这些是根据不同的实体对象“来做调整”,针对这种拥有 ...
- JavaScript 弹出框:警告(alert)、确认(confirm)的简单写法
onclick="javascript:return window.confirm('message')"
- java高级——反射
慕课网<反射——Java高级开发必须懂的>听课笔记 一.class类的使用 class ClassDemo { public static void main(String[] args) ...
- 关于RAID 10的介绍与创建
一.RAID 10的简介 定义: RAID10也被称为镜象阵列条带.象RAID0一样,数据跨磁盘抽取:象RAID1一样,每个磁盘都有一个镜象磁盘, 所以RAID 10的另一种会说法是 RAID 0+1 ...
- 技术人如何利用 github+Jekyll ,搭建一个独立免费的技术博客
上次有人留言说,技术博客是程序员的标配,但据我所知绝大部分技术同学到现在仍然没有自己的技术博客.原因有很多,有的是懒的写,有的是怕写不好,还有的是一直想憋个大招,幻想做到完美再发出来,结果一直胎死腹中 ...
- ESP 8266 引脚图
ESP 8266 引脚图
- nyoj 260-数数小木块 (打表)
260-数数小木块 内存限制:64MB 时间限制:3000ms 特判: No 通过数:17 提交数:24 难度:1 题目描述: 在墙角堆放着一堆完全相同的正方体小木块,如下图所示: 因为木块堆得实在是 ...
- C#实现整型数据字任意编码任意进制的转换和逆转换
实现如下: using System; using System.Collections.Generic; using System.Linq; using System.Text; namespa ...
- 关于 “'sqlite3' 不是内部或外部命令.....”问题
学习django 按书上的 执行 manage.py dbshell 时, 报“'sqlite3' 不是内部或外部命令,也不是可运行的程序 或批处理文件.” 也就是指,环境变量中没有“sqlite3 ...
- 使用Java窗口程序执行输入的任何cmd命令
利用Java窗口程序来执行用输入的任何命令 实现效果: Java桌面窗口,输入框.按钮,当输入框被输入命令的时候,点击按钮执行命令! 实现代码 package com.remote.remote.ag ...