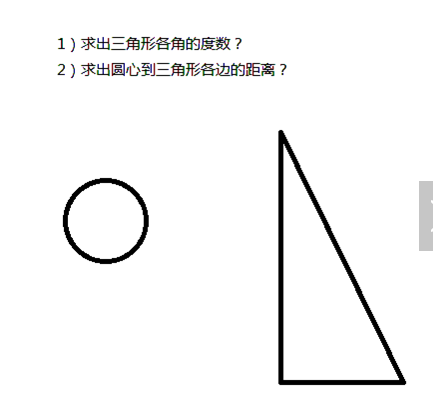
halcon的长度和角度测量
halcon代码:
1: *读取并截取图片
2: dev_close_window()
3: read_image (Image, 'D:/MyFile/halcon/长度和角度测量/图.png')
4: crop_rectangle1 (Image, ImagePart, 75, 0, 400, 400)
5: get_image_size (ImagePart, Width, Height)
6: dev_open_window (0, 0, Width, Height, 'black', WindowHandle)
7: dev_display (ImagePart)
8:
9: *获取图形的边界
10: threshold (ImagePart, Regions, 0, 112)
11:
12: *分离三角形和圆形
13: connection(Regions,ConnectedRegions)
14: sort_region(ConnectedRegions,SortedRegions,'upper_left','true','column')
15: select_obj(SortedRegions,Circle,1)
16: select_obj(SortedRegions,Triangle,2)
17:
18: *获取三角形各边的信息
19: skeleton(Triangle,TriangleSkeleton)
20: gen_contours_skeleton_xld(TriangleSkeleton,TriangleContours,1,'filter')
21: segment_contours_xld(TriangleContours,ContoursSplit,'lines_circles', 5, 4, 2)
22: select_contours_xld(ContoursSplit,SelectedContours, 'contour_length',100, 999, -0.5, 0.5)
23: fit_line_contour_xld (SelectedContours, 'tukey', -1, 10, 5, 2, RowBegin, ColBegin, RowEnd, ColEnd, Nr, Nc, Dist)
24:
25: *计算三角形角度
26: angle_ll (RowBegin[0], ColBegin[0], RowEnd[0], ColEnd[0], RowBegin[1], ColBegin[1], RowEnd[1], ColEnd[1], Angle1)
27: angle_ll (RowBegin[0], ColBegin[0], RowEnd[0], ColEnd[0], RowBegin[2], ColBegin[2], RowEnd[2], ColEnd[2], Angle2)
28: angle_ll (RowBegin[1], ColBegin[1], RowEnd[1], ColEnd[1], RowBegin[2], ColBegin[2], RowEnd[2], ColEnd[2], Angle3)
29: Angle1:=abs(deg(Angle1))
30: Angle2:=abs(deg(Angle2))
31: Angle3:=abs(deg(Angle3))
32:
33: *获取圆的信息
34: area_center(Circle,AreaCircle, RowCircle, ColumnCircle)
35:
36: *计算圆心到三角形各边的距离
37: Distance := []
38: for Index := 0 to 2 by 1
39: distance_pl (RowCircle, ColumnCircle, RowBegin[Index], ColBegin[Index], RowEnd[Index], ColEnd[Index], ThisDistance)
40: Distance := [Distance,ThisDistance]
41: endfor
halcon的长度和角度测量的更多相关文章
- CSS中的颜色、长度、角度、时间
一.颜色的表示方法 颜色是通过对红.绿和蓝光的组合来显示的. 1.颜色名 1 <!DOCTYPE html> 2 <html lang="en"> 3 &l ...
- halcon——缺陷检测常用方法总结(测量拟合)
引言 机器视觉中缺陷检测分为一下几种: blob分析+特征 模板匹配(定位)+差分:halcon--缺陷检测常用方法总结(模板匹配(定位)+差分) - 唯有自己强大 - 博客园 (cnblogs.co ...
- 基于HALCON的双目立体视觉系统实现
双目立体视觉是机器视觉的一种重要形式,它是基于视差原理并由多幅图像获取物体三维几何信息的方法.双目立体视觉系统一般由双摄像机从不同角度同时获得被测物的两幅数字图像,或由单摄像机在不同时刻从不同角度获得 ...
- halcon小结
持更 应用范围 (罗列自官方帮助文档,以后有空了按照需求展开叙述) 1. 安全系统 2. 表面检测 3. 定位 4. 二维测量比较 5. 二维码识别 6. 二维位置定位 7. 二维物体识别 8. 光学 ...
- android View的测量和绘制
本篇内容来源于android 群英传(徐易生著) 我写到这里,是觉得徐易生讲的确实很好, 另外加入了一些自己的理解,便于自己基础的提高. 另外参考:http://www.gcssloop.com/cu ...
- 《HALCON数字图像处理》第四章笔记
目录 第四章 HALCON数据结构 HALCON Image图像 图像通道 HALCON Region区域 Region的初步介绍 Region的点与线 Region的行程 Region的区域特征 H ...
- Highcharts 测量图;Highcharts 圆形进度条式测量图;Highcharts 时钟;Highcharts 双轴车速表;Highcharts 音量表(VU Meter)
Highcharts 测量图 配置 chart.type 配置 配置 chart 的 type 为 'gauge' .chart.type 描述了图表类型.默认值为 "line". ...
- C#开发PACS医学影像处理系统(十三):绘图处理之病灶测量
接上一篇文章,当我们可以绘制图形标记后,就可以在此操作类上面进行扩展, 比如测量类工具,目前整理出的常用绘图和测量功能如下: 测量工具类:(图形标记类请参考本系列文章:绘图处理之图形标记) 功能 说明 ...
- ArcGIS中的坐标系统定义与投影转换【转】
ArcGIS中的坐标系统定义与投影转换 坐标系统是GIS数据重要的数学基础,用于表示地理要素.图像和观测结果的参照系统,坐标系统的定义能够保证地理数据在软件中正确的显示其位置.方向和距离,缺少坐标系统 ...
随机推荐
- python之csv操作问题
注意注意 写入csv文件 一定要注意 [ ] fileObj = open("fileName","w+") file = csv.writer(fileObj ...
- Git学习的网址
http://www.liaoxuefeng.com/wiki/0013739516305929606dd18361248578c67b8067c8c017b000 https://github.co ...
- hihoCoder1599 bfs
特殊的剪枝,整体上和辗转相除法有点像 #1599 : 逃离迷宫4 时间限制:10000ms 单点时限:1000ms 内存限制:256MB 描述 小Hi被坏女巫抓进一座由无限多个格子组成的矩阵迷宫. 小 ...
- 前端ajax异步传值以及后端接收参数的几种方式
原文参考 异步传值 前台往后台传值呢,有很多种方式,大家听我细细道来. 第一种呢,也是最简单的一种,通过get提交方式,将参数在链接中以问号的形式进行传递. // 前台传值方法 // 触发该方法调用a ...
- BZOJ4557 JLoi2016 侦察守卫 【树形DP】*
BZOJ4557 JLoi2016 侦察守卫 Description 小R和B神正在玩一款游戏.这款游戏的地图由N个点和N-1条无向边组成,每条无向边连接两个点,且地图是连通的.换句话说,游戏的地图是 ...
- Python Tkinter 学习历程 一
一丶一个简单的程序 from tkinter import * #引入所有类#查看tk版本#tkinter._test() root = Tk(); #对这个类进行实例化 w1 = Label(roo ...
- LG3953 逛公园
题意 策策同学特别喜欢逛公园.公园可以看成一张\(N\)个点\(M\)条边构成的有向图,且没有 自环和重边.其中1号点是公园的入口,\(N\)号点是公园的出口,每条边有一个非负权值, 代表策策经过这条 ...
- filter防盗链
1这次练习中一直受到相对路径的干扰,现在澄清一点 forward中不是不需要包含根目录的 比如 http://localhost:8080/filter/upload/images/no.jpg 你 ...
- linux常用小技巧(持续更新中)
一.设置固定ip地址1.config查看用的是哪一个网卡这是假设用的是eth12.修改dns地址vim /etc/resolv.confsearch 域名地址nameserver 192.168.3. ...
- Java Language Changes for Java SE 9
Java9引入了module模块的概念,是类与接口和数据资源的一种封装,并可以声明与其他模块的依赖关系.这里总结一下Java9带来的新特性. 更简练的try-with-resources语句 fina ...