Ubuntu16.04, Gqrx通过RTL-SDR的Q通道收听中短波
硬件准备
天线: 一根悬垂的3~4米长线天线, 如果只是临时使用, 直接用普通的0.75平方的聚氯乙烯多股软电线就可以了.
巴伦: 9:1巴伦
接收器: Q通道增加低频输入的RTL-SDR接收器
以及相应的连接线.
接收器
电路板的正面和反面, 连接头是SMA, 外螺内孔, 一个连接原天线口, 负责25MHz以上的信号输入, 另一个通过LC通道后连接Q通道, 负责100KHz至25MHz的信号输入


焊好后的成品, 其中绿色的小板是带温补的晶振

实际的连接

软件Gqrx
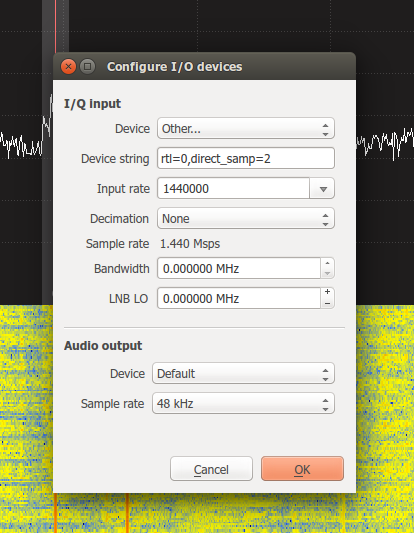
软件的安装可以参考之前的文章. 这里要说明的是, 如何用Gqrx从Q通道直接采样. 在Configure I/O devices中, Device string里增加 direct_samp=2 这个参数, 如图
设置完之后, 需要重启Gqrx 才能生效. 重启Gqrx时, 会提示配置有问题, 进入编辑界面后, 直接确认进入软件就可以了.
参数的说明, 可以参考 http://osmocom.org/projects/sdr/wiki/GrOsmoSDR
| Argument | Notes |
|---|---|
| rtl=<device-index> | 0-based device identifier OR serial number |
| rtl_xtal=<frequency> | Frequency (Hz) used for the RTL chip, accepts scientific notation |
| tuner_xtal=<frequency> | Frequency (Hz) used for the tuner chip, accepts scientific notation |
| buffers=<number-of-buffers> | Default is 32 |
| buflen=<length-of-buffer> | Default is 256kB, must be multiple of 512 |
| direct_samp=0|1|2 | Enable direct sampling mode on the RTL chip. 0: Disable, 1: use I channel, 2: use Q channel |
| offset_tune=0|1 | Enable offset tune mode for E4000 tuners |
NOTE: use rtl_eeprom -s to program your own serial number to the device
NOTE: if you don't specify rtl_xtal/tuner_xtal, the underlying driver will use 28.0MHz
运行截图

硬件散热
接收器运行中, RTL2832温度不太高, 但是R820T2的发热比较厉害, 特别是接收器工作在高频段(如FM)时, 手指放上几秒后能感觉到烫手, 运行在低频段时, R820T2的发热明显小一些. 如果只是在室温下使用, 应该还不需要散热片.
Ubuntu16.04, Gqrx通过RTL-SDR的Q通道收听中短波的更多相关文章
- rtl-sdr在win7和ubuntu16.04的安装
硬件准备 RTL2832+R820T2 usb dongle x 1 Long wire antenna x 1 USB电视棒的购买: 在淘宝上搜索"软件无线电"或"rt ...
- ubuntu16.04配置py-faster-rcnn
在ubuntu16.04下编译安装了py-faster-rcnn. 主要步骤包括:安装cuda/cudnn,换apt源,装开源显卡驱动,装caffe依赖的apt包和python包,下载py-faste ...
- caffe安装:ubuntu16.04 + opencv2.4 + python 2.7+ CUDA 8.0 RC + CuDNN 5.0
官方教程:http://caffe.berkeleyvision.org/install_apt.html 主要参考教程: https://github.com/BVLC/caffe/wiki/Ubu ...
- (转)深度学习主机环境配置: Ubuntu16.04+Nvidia GTX 1080+CUDA8.0
深度学习主机环境配置: Ubuntu16.04+Nvidia GTX 1080+CUDA8.0 发表于2016年07月15号由52nlp 接上文<深度学习主机攒机小记>,这台GTX10 ...
- SLAM+语音机器人DIY系列:(二)ROS入门——3.在ubuntu16.04中安装ROS kinetic
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- 深度学习环境搭建(ubuntu16.04+Titan Xp安装显卡驱动+Cuda9.0+cudnn+其他软件)
一.硬件环境 ubuntu 16.04LTS + windows10 双系统 NVIDIA TiTan XP 显卡(12G) 二.软件环境 搜狗输入法 下载地址 显卡驱动:LINUX X64 (AMD ...
- 深度学习环境配置:Ubuntu16.04安装GTX1080Ti+CUDA9.0+cuDNN7.0完整安装教程(多链接多参考文章)
本来就对Linux不熟悉,经过几天惨痛的教训,参考了不知道多少篇文章,终于把环境装好了,每篇文章或多或少都有一些用,但没有一篇完整的能解决我安装过程碰到的问题,所以决定还是自己写一篇我安装过程的教程, ...
- django2+uwsgi+nginx上线部署到服务器Ubuntu16.04(最新最详细版)
1.前期准备 1.打开Terminal终端,执行以下命令,将项目所需要的依赖包,都记录到一个文件内备用. pip freeze >requirements.txt 2.将项目文件夹→右键→添加压 ...
- Ubuntu16.04+Opencv3.3的安装教程
需要准备的基本材料(请先看完整个安装过程再进行下面的操作): 一.到Opecv-Release的Github项目上下载最新的Opencv版本,注意---基于python2.7,可选用 OpenCV2. ...
随机推荐
- 用SLF4j/Logback打印日志-2
本篇主要介绍logback的输出源配置,logback默认提供了很多输出源,但是用的最多的是这几种: OutputStreamAppender 日志输出到一个二进制流,可以通过 <encoder ...
- C# 图片识别(支持21种语言) (转)
图片识别的技术到几天已经很成熟了,只是相关的资料很少,为了方便在此汇总一下(C#实现),方便需要的朋友查阅,也给自己做个记号. 图片识别的用途:很多人用它去破解网站的验证码,用于达到自动刷票或者是批量 ...
- 国外物联网平台(1):亚马逊AWS IoT
国外物联网平台(1)——亚马逊AWS IoT 马智 平台定位 AWS IoT是一款托管的云平台,使互联设备可以轻松安全地与云应用程序及其他设备交互. AWS IoT可支持数十亿台设备和数万亿条消息,并 ...
- 用css3和jQuery制作精美的表单
用css3和jQuery制作一个简单的精美表单 html代码如下: <span class="title">Mask Your Input Forms and Make ...
- grunt-cmd-transport提取deps[]的BUG
该BUG已经在GitHub上提了issue,详见:#56 文件 // employee/static/adder.js define(function (require, exports) { exp ...
- 求一个正实数X的开方
问题:求一个正实数X的平方根,不能使用sqrt等库函数. 解析:本题要求求一个正实数的平方根,不能使用sqrt等已有的库函数,我们可以做一下考虑: 利用二分法,mid=X/2.0,若mid*mid&g ...
- Active Learning
怎么办?进行Active Learning主动学习 Active Learning是最近又流行起来了的概念,是一种半监督学习方法. 一种典型的例子是:在没有太多数据的情况下,算法通过不断给出在决策边界 ...
- Eclipse CDT 插件列表
http://www.bestplugins.com/software/eclipse-c-plugin.html
- Creating fields using CSOM
When creating a field, whether you are using CAML, server-side object mode, or one of the client-s ...
- Spring 集成 redistemplate
jar包 <version.clients.jedis>2.7.2</version.clients.jedis><version.data.redis>1.6.2 ...