g2o优化库实现曲线拟合
g2o优化库实现曲线拟合
最近学习了一下g2o优化库的基本使用,尝试着自己写了一个曲线拟合的函数,也就是下面这个多项式函数:
\]
我们以 \(a = 3, b = -2, c=5, b=7\)为例,拟合出的图像大概长这样。

下面简单记录一下思路:
目标函数:
\]
目标就是求解出一组 \(a,b,c,d\)使得观测值和估计值的误差最小化。
高斯牛顿法
推导出每个误差项关于优化变量的导数:
\[\begin{aligned}
& \frac{\partial e_i}{\partial a}=-x_i^3\\
& \frac{\partial e_i}{\partial b}=-x_i^2 \\
& \frac{\partial e_i}{\partial c}=-x_i \\
& \frac{\partial e_i}{\partial d}=-1
\end{aligned}
\]于是 \(\boldsymbol{J}_i=\left[\frac{\partial e_i}{\partial a}, \frac{\partial e_i}{\partial b}, \frac{\partial e_i}{\partial c} \frac{\partial e_i}{\partial d}, \right]^{\mathrm{T}}\), 高斯牛顿法的增量方程为:
\[\left(\sum_{i=1}^{N} \boldsymbol{J}_i\left(\sigma^2\right)^{-1} \boldsymbol{J}_i^{\mathrm{T}}\right) \Delta \boldsymbol{x}_k=\sum_{i=1}^{N}-\boldsymbol{J}_i\left(\sigma^2\right)^{-1} e_i,
\]代码在附录里,假设要估计的 \(a=3, b=-2,c=5,d=7\),大概只需要三次迭代就能得到估计的结果。

g2o
优化变量构成一个顶点,每个误差项构成一条边。
顶点类需要重写变量的重置,更新函数;
边类需要设置关联的顶点,重写误差计算函数,必要时也可以给出解析导数。
下面我们主要测试一下是否给出误差项关于优化变量的解析导数对g2o求解次数的影响(对应的就是g2o_curve.cpp中雅各比矩阵是否注释)
| 不提供解析导数 | 提供解析导数 |
|---|---|
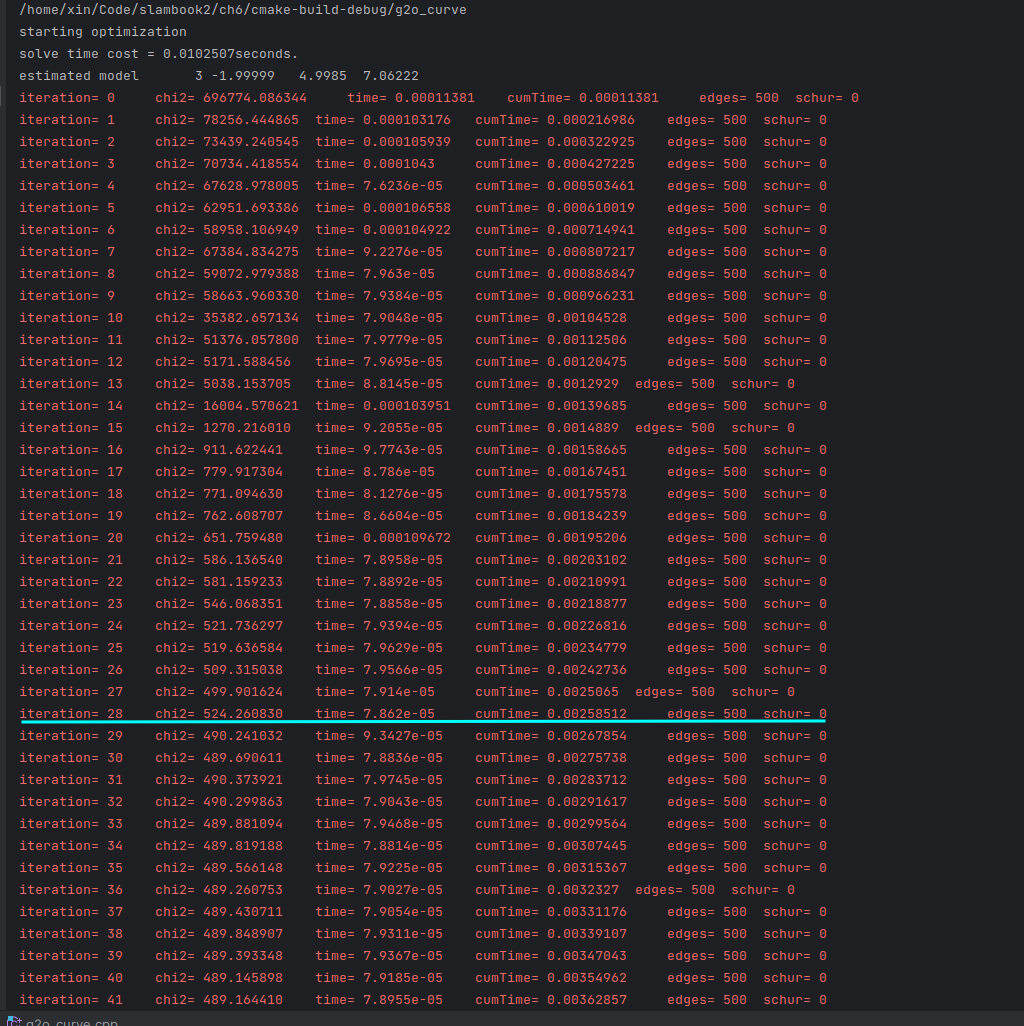 |
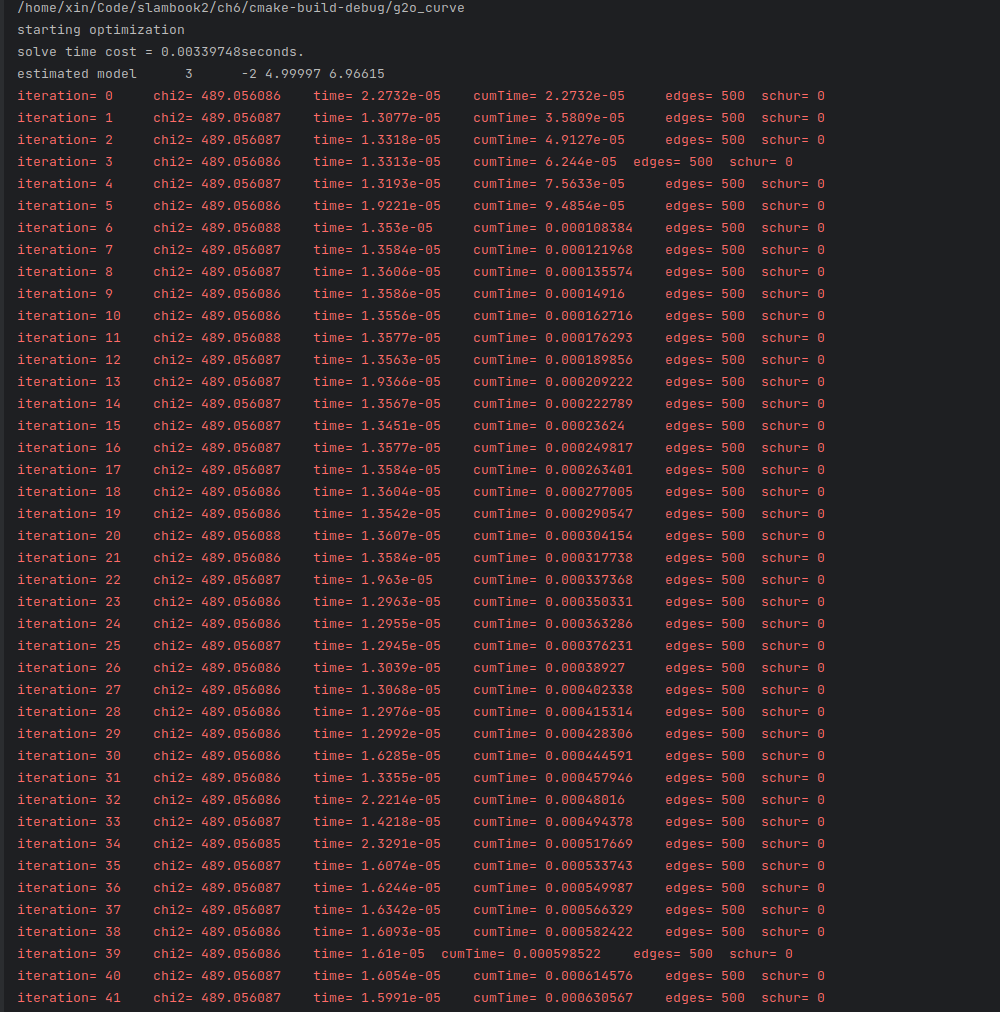 |
| 0.01s | 0.003s |
我们可以看到速度差别还挺大的。
附录
gaussNewton.cpp
//
// Created by xin on 23-6-6.
// use g2o curve fitting y = a*x_3 + b*x_2 + c*x + d
//
#include <iostream>
#include <chrono>
#include <opencv2/opencv.hpp>
#include <Eigen/Core>
#include <Eigen/Dense>
using namespace std;
int main() {
double a = 3.0, b = -2.0, c = 5.0, d = 7; // 真实参数值
double ae = 1, be = 1, ce = 1, de = 100; // 初始参数值
int N = 500; //数据点个数
double w_sigma = 1.0;
double inv_sigma = 1.0 / w_sigma;
cv::RNG rng;
vector<double> x_data, y_data;
for (int i = 0; i < N; i++) {
double x = double(i);
x_data.push_back(x);
y_data.push_back(a * pow(x, 3) + b * pow(x, 2) + c*x + d + rng.gaussian(w_sigma * w_sigma));
//std::cout << x << "," << a * pow(x, 3) + b * pow(x, 2) + c * x + d + rng.gaussian(w_sigma * w_sigma) << endl;
}
// 开始Gauss-Newton迭代
int iterations = 1000; // 迭代次数
double cost = 0, lastCost = 0; // 本次迭代的cost和上一次迭代的cost
chrono::steady_clock::time_point t1 = chrono::steady_clock::now();
for (int iter = 0; iter < iterations; iter++) {
Eigen::Matrix4d H = Eigen::Matrix4d::Zero(); // Hessian = J^T W^{-1} J in Gauss-Newton
Eigen::Vector4d b = Eigen::Vector4d::Zero(); // bias
cost = 0;
for (int i = 0; i < N; i++) { //求每一个数据点的 J 矩阵
double xi = x_data[i], yi = y_data[i]; // 第i个数据点
double error = yi - (ae*pow(xi, 3) + be*pow(xi, 2) + ce*xi + de);
Eigen::Vector4d J; // 雅可比矩阵
J[0] = -pow(xi, 3);
J[1] = -pow(xi, 2);
J[2] = -xi;
J[3] = -1;
H += inv_sigma * inv_sigma * J * J.transpose();
b += -inv_sigma * inv_sigma * error * J;
cost += error * error;
}
// 求解线性方程 Hx=b
Eigen::Vector4d dx = H.ldlt().solve(b);
if (isnan(dx[0])) {
cout << "result is nan!" << endl;
break;
}
if (iter > 0 && cost >= lastCost) {
cout << "cost: " << cost << ">= last cost: " << lastCost << ", break." << endl;
break;
}
ae += dx[0];
be += dx[1];
ce += dx[2];
de += dx[3];
lastCost = cost;
cout << "total cost: " << cost << ", \t\tupdate: " << dx.transpose() <<
"\t\testimated params: " << ae << "," << be << "," << ce << "," << de << endl;
}
chrono::steady_clock::time_point t2 = chrono::steady_clock::now();
chrono::duration<double> time_used = chrono::duration_cast<chrono::duration<double>>(t2 - t1);
cout << "solve time cost = " << time_used.count() << " seconds. " << endl;
cout << "estimated abcd = " << ae << ", " << be << ", " << ce << "," << de << endl;
return 0;
return 0;
}
g2o_curve.cpp
//
// Created by xin on 23-6-6.
// use g2o curve fitting y = a*x_3 + b*x_2 + c*x + d
//
#include <iostream>
#include <g2o/core/g2o_core_api.h>
#include <g2o/core/base_vertex.h>
#include <g2o/core/base_unary_edge.h>
#include <g2o/core/block_solver.h>
#include <g2o/core/optimization_algorithm_levenberg.h>
#include <g2o/core/optimization_algorithm_gauss_newton.h>
#include <g2o/core/optimization_algorithm_dogleg.h>
#include <g2o/solvers/dense/linear_solver_dense.h>
#include <Eigen/Core>
#include <opencv2/core/core.hpp>
#include <cmath>
#include <chrono>
using namespace std;
/// 自定义图优化的顶点 以及 边
class CurveFittingVertex : public g2o::BaseVertex<4, Eigen::Vector4d> {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW;
// 重置
virtual void setToOriginImpl() override {
_estimate << 0, 0, 0, 0;
}
// 更新
virtual void oplusImpl(const double *update) override {
_estimate += Eigen::Vector4d(update);
}
virtual bool read(istream &in) {}
virtual bool write(ostream &out) const {}
};
class CurveFittingEdge : public g2o::BaseUnaryEdge<1, double, CurveFittingVertex> { // 误差项的维度, 类型, 关联的顶点
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW;
CurveFittingEdge(double x) : BaseUnaryEdge(), _x(x) {}
// 误差函数
virtual void computeError() override {
const CurveFittingVertex *v = static_cast<const CurveFittingVertex *> (_vertices[0]); //此处拿到关联的顶点
Eigen::Vector4d abcd = v->estimate();
_error(0, 0) =
_measurement - (abcd[0] * pow(_x, 3) + abcd[1] * pow(_x, 2) + abcd[2] * _x + abcd[3]);
}
// 雅各比矩阵,可以注释掉对比一下求解速度
virtual void linearizeOplus() override {
_jacobianOplusXi[0] = -_x * _x * _x;
_jacobianOplusXi[1] = -_x * _x;
_jacobianOplusXi[2] = -_x;
_jacobianOplusXi[3] = -1;
}
virtual bool read(istream &in) {}
virtual bool write(ostream &out) const {}
public:
double _x; // 这个误差项对应的自变量x
};
int main() {
double a = 3.0, b = -2.0, c = 5.0, d = 7; // 真实参数值
double ae = 1, be = 1, ce = 1, de = 100; // 初始参数值
int N = 500; //数据点个数
double w_sigma = 1.0;
double inv_sigma = 1.0 / w_sigma;
cv::RNG rng;
vector<double> x_data, y_data;
for (int i = 0; i < N; i++) {
double x = double(i);
x_data.push_back(x);
y_data.push_back(a * pow(x, 3) + b * pow(x, 2) + c*x + d + rng.gaussian(w_sigma * w_sigma));
std::cout << x << "," << a * pow(x, 3) + b * pow(x, 2) + c * x + d + rng.gaussian(w_sigma * w_sigma) << endl;
}
// 构建图优化
typedef g2o::BlockSolver<g2o::BlockSolverTraits<4, 1>> BlockSolverType;
typedef g2o::LinearSolverDense<BlockSolverType::PoseMatrixType> LinearSolverType; // 线性求解器类型 dense CSparse
//梯度下降方法
auto solver = new g2o::OptimizationAlgorithmGaussNewton(
g2o::make_unique<BlockSolverType>(g2o::make_unique<LinearSolverType>())
);
g2o::SparseOptimizer optimizer;
optimizer.setAlgorithm(solver);
optimizer.setVerbose(true);
//往图中加入顶点
CurveFittingVertex *v = new CurveFittingVertex();
v->setId(0);
v->setEstimate(Eigen::Vector4d(ae, be, ce, de));
optimizer.addVertex(v);
//往图中加入边(误差项)
for(int i = 0; i < N; i++){
CurveFittingEdge *edge = new CurveFittingEdge(x_data[i]);
edge->setId(i);
edge->setVertex(0, v);
edge->setMeasurement(y_data[i]);
edge->setInformation(Eigen::Matrix<double, 1, 1>::Identity() * 1 / (w_sigma * w_sigma));
optimizer.addEdge(edge);
}
cout << "starting optimization" << endl;
chrono::steady_clock::time_point t1 = chrono::steady_clock::now();
optimizer.initializeOptimization();
optimizer.optimize(100);
chrono::steady_clock::time_point t2 = chrono::steady_clock::now();
chrono::duration<double> time_used = chrono::duration_cast<chrono::duration<double>>(t2 - t1);
cout << "solve time cost = " << time_used.count() << "seconds." << endl;
// output 结果
Eigen::Vector4d abcd_estimate = v->estimate();
cout << "estimated model" << abcd_estimate.transpose() << endl;
return 0;
}
g2o优化库实现曲线拟合的更多相关文章
- [g2o]C++图优化库
g2o以图模型表达上述最小二乘问题:比较适合解决SLAM问题 http://openslam.org http://wiki.ros.org/g2o
- 嵌入式开发之davinci--- 8148/8168/8127 中的图像处理算法优化库vlib
The Texas Instruments VLIB is an optimizedImage/Video Processing Functions Library for C programmers ...
- [Ceres]C++优化库
官网教程: http://ceres-solver.org/nnls_tutorial.html 定义了一个最小二乘法求解器 自动求导的功能
- 视觉SLAM漫淡(二):图优化理论与g2o的使用
视觉SLAM漫谈(二):图优化理论与g2o的使用 1 前言以及回顾 各位朋友,自从上一篇<视觉SLAM漫谈>写成以来已经有一段时间了.我收到几位热心读者的邮件.有的希望我介绍一下当前 ...
- 深入理解图优化与g2o:图优化篇
前言 本节我们将深入介绍视觉slam中的主流优化方法——图优化(graph-based optimization).下一节中,介绍一下非常流行的图优化库:g2o. 关于g2o,我13年写过一个文档,然 ...
- 视觉slam十四讲开源库安装教程
目录 前言 1.Eigen线性代数库的安装 2.Sophus李代数库的安装 3.OpenCV计算机视觉库的安装 4.PCL点云库的安装 5.Ceres非线性优化库的安装 6.G2O图优化库的安装 7. ...
- Ubuntu16.04安装视觉SLAM环境(g2o)
1.首先在github上下载g2o图优化库 git clone https://github.com/RainerKuemmerle/g2o.git 2.运行安装以下依赖库 sudo apt-get ...
- 第六篇 视觉slam中的优化问题梳理及雅克比推导
优化问题定义以及求解 通用定义 解决问题的开始一定是定义清楚问题.这里引用g2o的定义. \[ \begin{aligned} \mathbf{F}(\mathbf{x})&=\sum_{k\ ...
- 姿态角(RPY)的优化目标函数
在Pose-Graph的过程中,如果使用G2O优化函数库,那么似乎是不用自己编写代价函数(也就是优化目标函数)的,因为G2O有封装好的SE3等格式,使得Pose-Graph的过程变得简单了,即只需要设 ...
- rpc优化
1.刷文章列表的时候,发现调用总时间100ms ,其中调策略是花了60ms,一个开源的map方法dozer,组装bean要花40ms 2.redis的zounct方法,传 1和-1的时候有时候会返回0 ...
随机推荐
- 掌握 PostgreSQL 的 psql 命令行工具
title: 掌握 PostgreSQL 的 psql 命令行工具 date: 2024/12/30 updated: 2024/12/30 author: cmdragon excerpt: psq ...
- 数组 | 切片 | map | Go语言
数组 1.数组的长度需要声明 2.存储的数据类型必须一致 3.可以通过下标来访问,超出长度问报访问越界的错误 4.不支持负数索引 5.数组是值类型,传递的都是拷贝,不会对原来的对象进行修改 6.Go中 ...
- 今天记录一下管理系统中预览pdf的方法
在管理系统中,有很多需要预览文件的操作,既方便用户查看又可以不用打开新的页面,我发现一个不错的方法,记录一下 <el-dialog title="" :visible.syn ...
- C51--05---LCD1602调试工具
一.LCD1602调试工具 单片机调试工具: 数码管 液晶屏 串口 数码管需要不断进行扫描,一旦扫描不及时就会不断闪烁,并且可显示的数据太过局限: 串口需要使用电脑进行发送指令,不易操作与携带: 所以 ...
- Solution -「LNOI 2022」「洛谷 P8367」盒
\(\mathscr{Desription}\) Link. 有 \(n\) 个盒子排成一排,第 \(i\) 个盒子内有 \(a_i\) 个球.球可以在相邻盒子间传递,\(i\) 与 \(i+ ...
- 远程连接Windows
远程桌面连接 限制 1.同网段 (1)服务器关闭防火墙 (2)服务器端 右键点击'我的电脑'进入'属性'点击左侧菜单栏中的'远程设置': 把远程桌面选项设置成'允许运行任意版本远程桌面的计算机连接'. ...
- Doris端口列表
实例名称 端口名称 默认端口 通讯方向 说明 BE be_port 9060 FE --> BE BE 上 thrift server 的端口,用于接收来自 FE 的请求 BE webserve ...
- Spark Sql调优
一.任务调参 1.1 spark.executor.memory executor执行分配的内存大小 1.2 spark.executor.cores executor执行分配的核数 1.3 spar ...
- webgpu学习问题,遇到了create graphics pipeline state failed错误
在学习webgpu并渲染图像时发生create graphics pipeline state failed with E_INVALIDARG (0x80070057)错误,图像无法成功渲染. ht ...
- Zookeeper - 本地模式部署
本地模式部署 zoo.cfg 参数解析 本地模式部署 1.上传zookeeper的安装包并解压 tar -zxvf zookeeper-x.x.x.tar.gz -c /xxx/xxx/ 2.将 zo ...