Using rqt_console and roslaunch
Description: This tutorial introduces ROS using rqt_console and rqt_logger_level for debugging and roslaunch for starting many nodes at once
debug工具
- rqt_console
- rqt_logger_level
rosrun rqt_console rqt_console #界面化的实时的日志监控
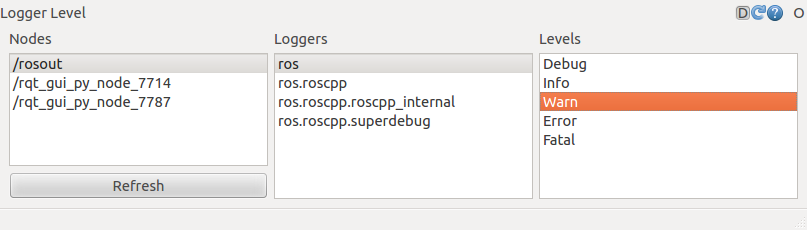
rosrun rqt_logger_level rqt_logger_level #界面化的用于设置日志级别
支持的日志级别
Fatal
Error
Warn
Info
Debug
roslaunch
echo $ROS_PACKAGE_PATH
<launch> --标明这是一个launch file
<group ns="turtlesim1"> --不同的namespace 允许有起2个同样name的node
<node pkg="turtlesim" name="sim" type="turtlesim_node"/>
</group>
<group ns="turtlesim2">
<node pkg="turtlesim" name="sim" type="turtlesim_node"/>
</group>
<node pkg="turtlesim" name="mimic" type="mimic"> --起一个mimic node.
<remap from="input" to="turtlesim1/turtle1"/> --This renaming will cause turtlesim2 to mimic turtlesim1
<remap from="output" to="turtlesim2/turtle1"/>
</node>
</launch>
读取turtlemimic.launch文件启动node
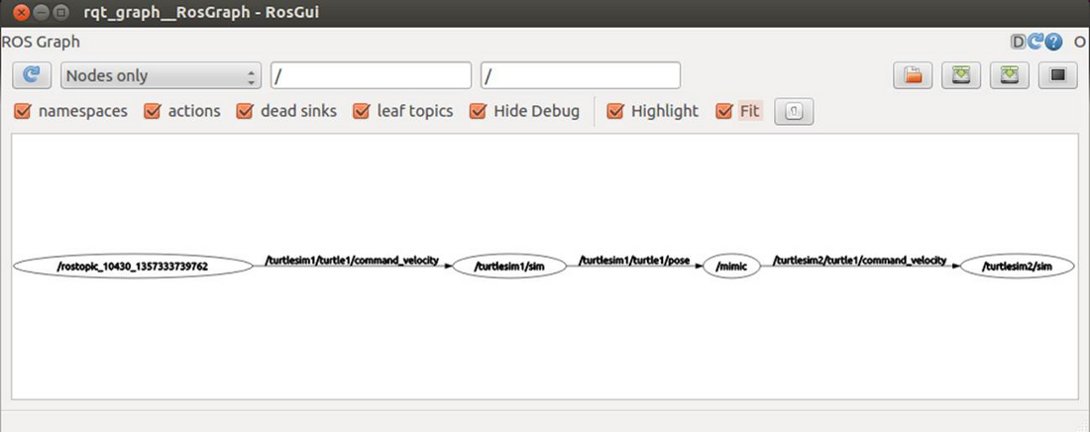
roslaunch beginner_tutorials turtlemimic.launch
rqt或rqt_graph查看roslaunch实际做了什么
Using rqt_console and roslaunch的更多相关文章
- 理解ROS rqt_console和 roslaunch
1.使用rqt_console和roslaunch 这篇教程将介绍使用rqt_console和rqt_logger_level来调试以及使用roslaunch一次启动许多nodes.如果你使用ROS ...
- ROS学习(九)—— rqt_console 和 roslaunch
一.rqt_console 和rqt_logger_level 1.作用: rqt_console依据ROS编译日志,输出节点信息 rqt_logger_level可以改变节点的警告出差的警告等级 2 ...
- ROS学习手记 - 6 使用ROS中的工具:rqt_console & roslaunch & rosed
http://wiki.ros.org/ROS/Tutorials/UsingRqtconsoleRoslaunch Using rqt_console and roslaunch This tuto ...
- 使用 rqt_console 和 roslaunch---8
使用 rqt_console 和 roslaunch Description: 本教程介绍如何使用rqt_console和rqt_logger_level进行调试,以及如何使用roslaunch同时运 ...
- 快速了解 Robot Operating System(ROS) 机器人操作系统
http://www.ros.org/ 关于ROS About ROS http://www.ros.org/about-ros/ 机器人操作系统(ROS)是用于编写机器人软件的灵活框架.目的在简化 ...
- ROS机器人程序设计(原书第2版)补充资料 (柒) 第七章 3D建模与仿真 urdf Gazebo V-Rep Webots Morse
ROS机器人程序设计(原书第2版)补充资料 (柒) 第七章 3D建模与仿真 urdf Gazebo V-Rep Webots Morse 书中,大部分出现hydro的地方,直接替换为indigo或ja ...
- ROS_Kinetic_02 ROS Kinetic 迁移指南及中文wiki指南(Migration guide)
ROS_Kinetic_02 ROS Kinetic 迁移指南(Migration guide) 对于ROS Kinetic Kame有些功能包已经更新改变,提供关于这些包的迁移注意或教程.主要针对于 ...
- ROS教程
Learning ROS 学习ROS Depending on your learning style and preferences, you can take two approaches to ...
- ROS官网新手级教程总结
第 1 关卡:安装和配置 ROS 环境 目标:在计算机上安装和配置 ROS 环境. 安装 ROS 按照 ROS 安装说明进行安装. 管理环境 确定环境变量 ROS_ROOT 和 ROS_PACKAGE ...
随机推荐
- java 的基本数据类型及转换
数据类型精度: byte 8 位short 16 位int 32 位long 64 位float 32 位double 64 位char 16 位 boolean 占几位要看 jvm 的具体实现, 虽 ...
- JVM之垃圾回收
1.哪些内存需要回收?判断对象已死的方法(存活判定算法) 1.引用计数算法:难以解决对象之间相互循环引用的问题,不使用. 2.可达性分析算法:通过一系列“GC Root”对象作为起始点向下搜索,所走过 ...
- LinkedBlockingQueue 注记
近期看一个音频传输代码时,对方采用了LinkedBlockingQueue为生产者.消费者模式,来支撑读写线程. 个人感觉非常不错,因此也对这种方式进行总结,并梳理了一个基本的功能框架备用.主要两点: ...
- webpack 解决 semantic ui 中 google fonts 引用的问题
semantic ui css 的第一行引用了 google web font api,由于不可告人而又众所周知的原因,这条链接在国内无法访问: @import url('https://fonts. ...
- 简单实用而不追求时髦的 Vim 配置
前言 由于 Vim 的广泛流行,在网络上关于 Vim 的自定义配置汗牛充栋.既有高手 Tim Pope 的极简配置 tpope/vim-sensible(这个配置一个插件都没有),也有 spf13/s ...
- 实战深度学习(下)OpenCV库
在上一节中,我们讲到了OpenCV库的安装,现在我们来进行实战,看如何利用Python来调用OpenCV库. 一: 如果您的电脑是win10的系统,那么请您按下win键,再按下空格键,输入Python ...
- emWin收音机,含uCOS-III和FreeRTOS两个版本
第11期:收音机配套例子:V6-919_STemWin提高篇实验_收音机(uCOS-III)V6-920_STemWin提高篇实验_收音机(FreeRTOS) 例程下载地址: http://forum ...
- python编译pyc工程--导包问题解决
利用python 编译工程,生产pyc文件 pyc文件好处:是一种二进制机器码,并且隐藏了源文件代码,但是有和py文件一样的功能(可以理解为效果一样) 所以可以将代码隐藏,便于商业价值,保护代码隐私还 ...
- Linux指令装图像化界面
1.对yum进行配置安装.//这是重点 [root@localhost ~]# yum groupinstall "GNOME Desktop" "Graphical A ...
- Python内置函数(14)——delattr
英文文档: delattr(object, name) This is a relative of setattr(). The arguments are an object and a strin ...