第三期 第三期 搜索——1.运动规划(motion_planing)
运动规划的根本问题在于机器人可能存在于一个这样的世界中,
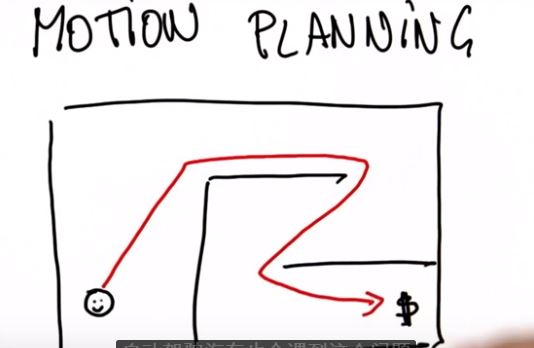
它可能想找到一条到达这个目标的路径,那么就需要指定一个到达那里的计划,
自动驾驶汽车也会遇到这个问题。他可能处于高速公路的附近的街道网络中,他必须要找到他的路径并导航到目标位置。
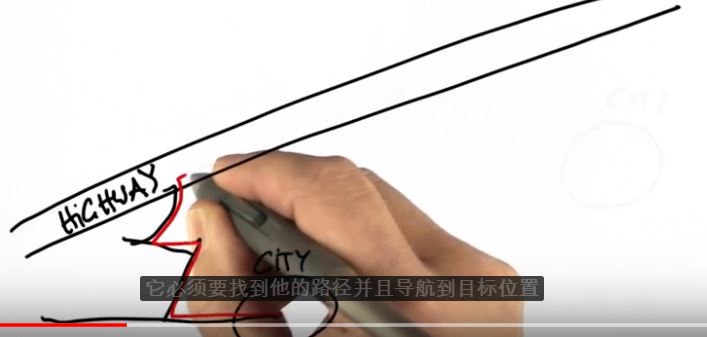
如果我们放大并且看看这个十字路口,这是我们渲染出来的最好的街道线环境。

从start出发顺着箭头直行,右转,直行,到达十字路口,现在在这里变换车道是一个冒险的方案
因为左边车道有一辆大卡车占道,一个可行的方案是在十字路直行绕着这个街区走。
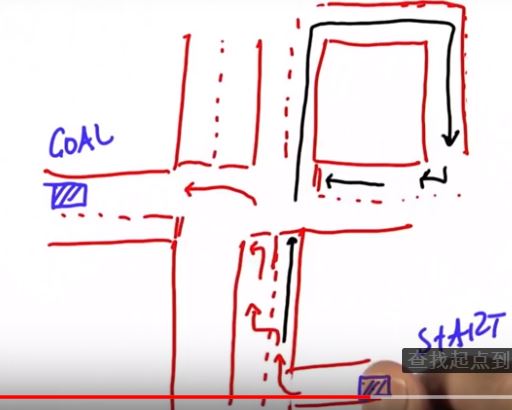
然后直道走到目标位置,查找起到到终点路径的过程称为规划,对机器人而言,常称为机器人运动规划,
今天我们将谈谈关于规划的离散方法。在哪里世界是分割成小块的。下一节课我们将谈谈使用这些方法
进行连续运动。
什么是规划问题?我们有一个世界地图,我们有一个起点和一个终点,通常我们会得到一种成本函数,
考虑成本的最简单方式是按照莫个路线行驶需要消耗的时间,我们的目标是找到最小成本路径。

第三期 第三期 搜索——1.运动规划(motion_planing)的更多相关文章
- 如何用MoveIt快速搭建机器人运动规划平台?
MoveIt = RobotGo,翻译成中文就是“机器人,走你!”所以,MoveIt的主要就是一款致力于让机器人能够自主运动及其相关技术的软件,它的所有模块都是围绕着运动规划的实现而设计的. 两个月前 ...
- Grassfire算法- 运动规划(Motion planning)
Grassfire算法: 一.概念 这个算法是做图像处理的抽骨架处理,目的是求出图像的骨架,可以想象一片与物体形状相同的草,沿其外围各点同时点火.当火势向内蔓延,向前推进的火线相遇处各点的轨迹就是中 ...
- 运动规划 (Motion Planning): MoveIt! 与 OMPL
原创博文:转载请标明出处:http://www.cnblogs.com/zxouxuewei 最近有不少人询问有关MoveIt!与OMPL相关的话题,但是大部分问题都集中于XXX功能怎么实现,XXX错 ...
- 【2018.04.19 ROS机器人操作系统】机器人控制:运动规划、路径规划及轨迹规划简介之一
参考资料及致谢 本文的绝大部分内容转载自以下几篇文章,首先向原作者致谢,希望自己能在这些前辈们的基础上能有所总结提升. 1. 运动规划/路径规划/轨迹规划的联系与区别 https://blog.csd ...
- 机器人运动规划中的构形空间(Configuration Space)
A key concept in motion planning is configuration space, or C-space for short. Every point in the C- ...
- MoveIt运动规划-1
按照帮助文档Setup Assistant Tutorial中的描述,用moveit_setup_assistant图形界面一步步配置机器人,最后生成机器人的配置文件保存到指定的文件夹中. 以UR5机 ...
- 运动规划 (Motion Planning): MoveIt! 与 OMPL---44
原创博文:转载请标明出处:http://www.cnblogs.com/zxouxuewei 最近有不少人询问有关MoveIt!与OMPL相关的话题,但是大部分问题都集中于XXX功能怎么实现,XXX错 ...
- 自动驾驶运动规划-Reeds Shepp曲线
自动驾驶运动规划-Reeds Shepp曲线 相比于Dubins Car只允许车辆向前运动,Reeds Shepp Car既允许车辆向前运动,也允许车辆向后运动. Reeds Shepp Car运动规 ...
- iOS高德地图使用-搜索,路径规划
项目中想加入地图功能,使用高德地图第三方,想要实现确定一个位置,搜索路线并且显示的方法.耗了一番功夫,总算实现了. 效果 WeChat_1462507820.jpeg 一.配置工作 1.申请key 访 ...
随机推荐
- I Love Palindrome String
I Love Palindrome String 时间限制: 2 Sec 内存限制: 128 MB 题目描述 You are given a string S=s1s2..s|S| containi ...
- windows无法启动MySQL服务报错1067的解决方法是怎样?
方法一: 1.打开my.ini文件,找到default-storage-engine=InnoDB这一行,把它改成default-storage-engine=MyISAM.2.删除在MySQL安装目 ...
- 缺氧debug模式开启及功能
在游戏OxygenNotIncluded_Data文件夹创建一个debug_enable.txt的空文本文档 在缺氧目录下添加debug_enable.txt文件 按删除键就可以开启debug模式 需 ...
- arcgis增大缩放级别
<!DOCTYPE html> <html> <head> <meta charset="utf-8"> <title> ...
- bnd.bnd属性文件格式
1.Header以大写字母开头 Bundle-Name: StoreAdminProductsTool 2.Instruction以-和小写字母开头 -sources: true 3. Macro形式 ...
- Kubernetes 调度器实现初探
Kubernetes 调度器 Kubernetes 是一个基于容器的分布式调度器,实现了自己的调度模块.在Kubernetes集群中,调度器作为一个独立模块通过pod运行.从几个方面介绍Kuberne ...
- 【codeforces Manthan, Codefest 17 C】Helga Hufflepuff's Cup
[链接]h在这里写链接 [题意] k是最高级别的分数,最高界别的分数最多只能有x个. 1<=k<=m; 和k相邻的点的分数只能小于k; n个点的树,问你每个 ...
- less知识点总结(一)
1.unit 删除或更换单位. 参数: dimension: 带单位或不带单位的数字. unit: (可选) 目标单位,如果省略此参数,则删除单位. See convert for changing ...
- AS2.2使用CMake方式进行JNI/NDK开发
之前写过一篇比较水的文章Android手机控制电脑撸出HelloWorld 里面用到了JNI/NDK技术. 这篇文章给大家介绍下JNI/NDK开发.采用的是Android Studio2.2开发环境, ...
- 【怪物】KMP畸形变种——扩展KMP
问题 参考51nod1304这道题: 很显然我们要求的是S的每个后缀与S的最长公共前缀的长度之和. 暴力 假设我们把next[i]表示为第i个后缀与S的最长公共前缀的长度. 现在我们想了:这个next ...