MoveIt运动规划-1
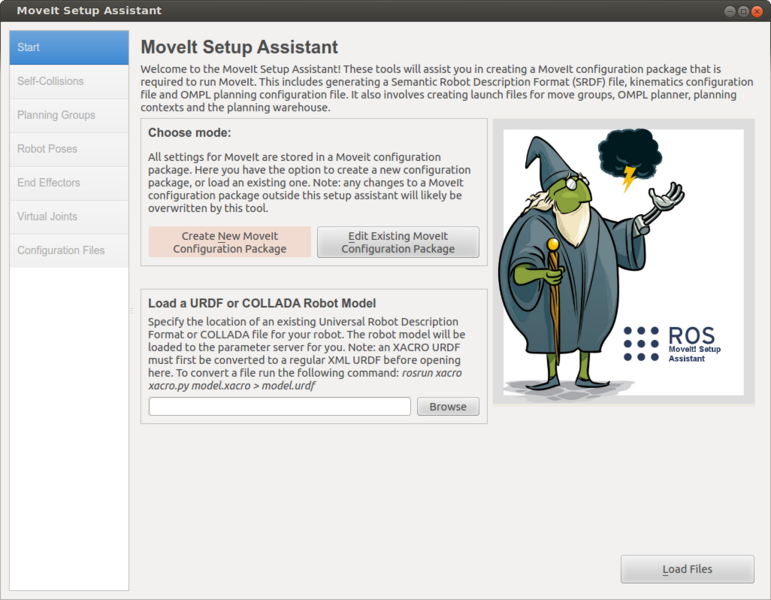
按照帮助文档Setup Assistant Tutorial中的描述,用moveit_setup_assistant图形界面一步步配置机器人,最后生成机器人的配置文件保存到指定的文件夹中。
以UR5机器人为例,将生成的配置文件保存在ur5_moveit_config文件夹中。生成的config文件夹中包含了一些机器人和求解器相关的配置文件,launch文件夹中的demo.launch主要作用是对所创建的MoveIt功能包进行基本测试。
在该路径下运行demo.launch文件: ~/Desktop/ur5_moveit_config/launch$ roslaunch demo.launch
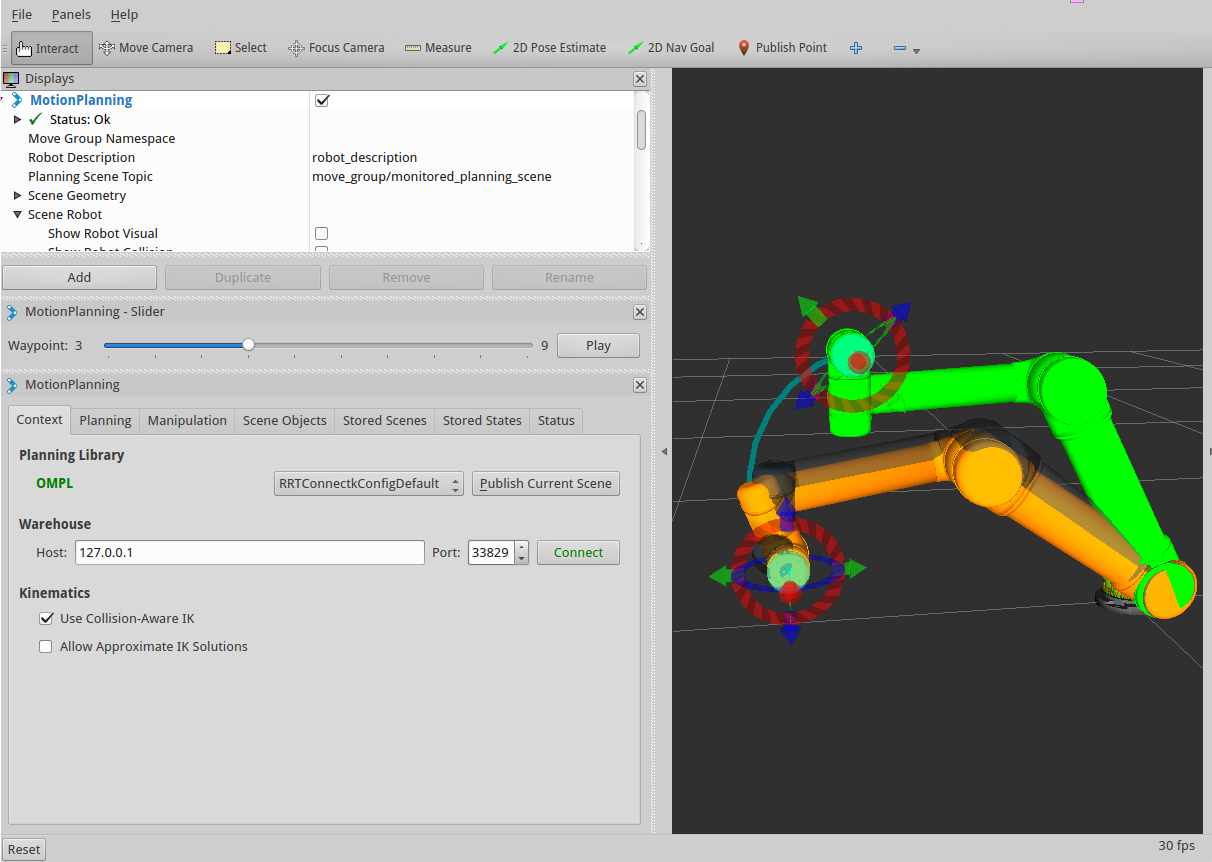
rivz左下角是运动规划MotionPlanning模块,右边的窗口中可以拖动控制球,来移动或旋转机器人的末端。其中绿色的机器人表示运动规划的起始姿态,橙色机器人表示运动规划的目标姿态。
当调整初始或目标姿态后在Planning选项卡的Query框中电机Update按钮进行更新,否则还是会按照之前的姿态进行规划。
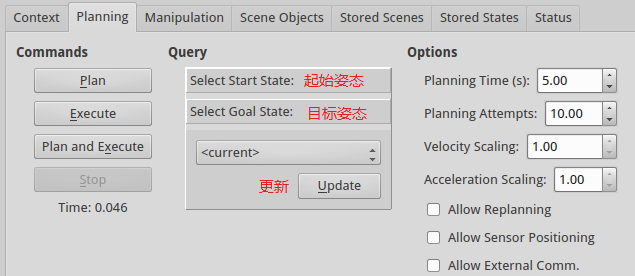
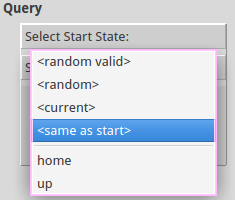
注意Start State和Goal State默认为当前设定的姿态<current>,如果要改为其它特定姿态可以从下拉框中选择,比如随机选择一个姿态<random>或者与初始姿态一致<same as start>。注意下面还有home和up两个姿态,home为初始的零位姿态,up为之前在MoveIt Setup Assistant选项栏Robot Pose中预定义的姿态。
路径规划前要选择好合适的算法,在Context选项栏OMPL路径规划库中选择“RRTConnectkConfigDefault”算法:
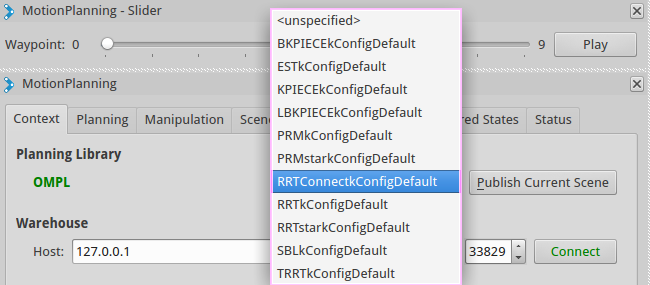
点击Planning选项栏中的Plan按钮进行路径规划,点击Execute按钮则会把机器人移动到目标位置处。在Panels菜单栏中打开MotionPlanning-Slider,会出现一个滑动条(默认不显示),拖动滑条可以显示机器人按规划路径运动的过程。

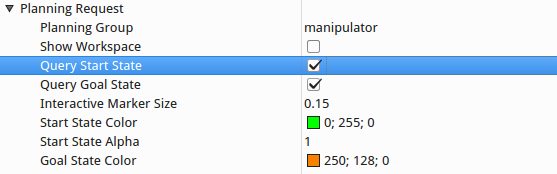
如果要显示末端点的运动轨迹等信息可以在Display→Planned Path中设置Show Trail。另外注意,在Display→Planning Request中勾选Query Start State和Query Goal State后,右边的窗口中才会显示机器人的初始和目标状态,默认不显示初始姿态。初始和目标状态的颜色可以在Start State Color和Goal State Color中改变。
参考:
运动规划 (Motion Planning): MoveIt! 与 OMPL
Mastering ROS for Robotics Programming (2015)-Chapter 11. ROS for Industrial Robots
MoveIt运动规划-1的更多相关文章
- 运动规划 (Motion Planning): MoveIt! 与 OMPL
原创博文:转载请标明出处:http://www.cnblogs.com/zxouxuewei 最近有不少人询问有关MoveIt!与OMPL相关的话题,但是大部分问题都集中于XXX功能怎么实现,XXX错 ...
- 如何用MoveIt快速搭建机器人运动规划平台?
MoveIt = RobotGo,翻译成中文就是“机器人,走你!”所以,MoveIt的主要就是一款致力于让机器人能够自主运动及其相关技术的软件,它的所有模块都是围绕着运动规划的实现而设计的. 两个月前 ...
- 运动规划 (Motion Planning): MoveIt! 与 OMPL---44
原创博文:转载请标明出处:http://www.cnblogs.com/zxouxuewei 最近有不少人询问有关MoveIt!与OMPL相关的话题,但是大部分问题都集中于XXX功能怎么实现,XXX错 ...
- 【2018.04.19 ROS机器人操作系统】机器人控制:运动规划、路径规划及轨迹规划简介之一
参考资料及致谢 本文的绝大部分内容转载自以下几篇文章,首先向原作者致谢,希望自己能在这些前辈们的基础上能有所总结提升. 1. 运动规划/路径规划/轨迹规划的联系与区别 https://blog.csd ...
- 机器人运动规划中的构形空间(Configuration Space)
A key concept in motion planning is configuration space, or C-space for short. Every point in the C- ...
- Grassfire算法- 运动规划(Motion planning)
Grassfire算法: 一.概念 这个算法是做图像处理的抽骨架处理,目的是求出图像的骨架,可以想象一片与物体形状相同的草,沿其外围各点同时点火.当火势向内蔓延,向前推进的火线相遇处各点的轨迹就是中 ...
- 第三期 第三期 搜索——1.运动规划(motion_planing)
运动规划的根本问题在于机器人可能存在于一个这样的世界中, 它可能想找到一条到达这个目标的路径,那么就需要指定一个到达那里的计划, 自动驾驶汽车也会遇到这个问题.他可能处于高速公路的附近的街道网络中,他 ...
- 自动驾驶运动规划-Reeds Shepp曲线
自动驾驶运动规划-Reeds Shepp曲线 相比于Dubins Car只允许车辆向前运动,Reeds Shepp Car既允许车辆向前运动,也允许车辆向后运动. Reeds Shepp Car运动规 ...
- 运动规划——PT and PVT 模式
最近项目成员在做机器人上层开发时,经常说到PT模式和PVT模式.一直没搞懂这两种模式的实际差别.上网检索进行学习...... ref link:https://blog.csdn.net/m0_376 ...
随机推荐
- osx的du以字节计算
https://stackoverflow.com/questions/5794437/difference-in-size-shown-by-du-command-and-get-info-on-m ...
- [转]mysql在已有无分区表增加分区,mysql5.5才有,可以是innodb_file_per_table关闭状态.
FROM : http://blog.csdn.net/sunvince/article/details/7752662 mysql5.1的时候新增的partition,解决了比较简单的shardin ...
- [转]php 操作数组 (合并,拆分,追加,查找,删除等)
From : http://justcoding.iteye.com/blog/1181962 1. 合并数组 array_merge()函数将数组合并到一起,返回一个联合的数组.所得到的数组以第一个 ...
- 使用PHP生成二维码图像
1.PHP生成二维码图像的类QRcode http://www.phper.org.cn/?post=128 QRcode是用于生成二维条形码的开放源码 (LGPL) 库.提供 API 创建条码图像. ...
- android自定义风格的toast
先上图看一下我的自定义toast的样式 源码下载地址: CustomToastActivity.java源码 package com.jinhoward.ui_customtoast; /** * A ...
- [PowerShell Utils] Create a list of virtual machines based on configuration read from a CSV file in Hyper-V
Hello everyone, this is the third post of the series. . Background =============== In my solution, ...
- javascript this详解 面向对象
在面向对象编程语言中,对于this关键字我们是非常熟悉的.比如C++.C#和Java等都提供了这个关键字 虽然在开始学习的时候觉得比较难,但只要理解了,用起来是非常方便和意义确定的.JavaS ...
- C++_友元函数总结(转)
原文地址:http://blog.csdn.net/insistgogo/article/details/6608672 1.为什么要引入友元函数:在实现类之间数据共享时,减少系统开销,提高效率 ...
- (转)Unity3D工程版本管理方案
自:http://blog.dou.li/unity3d%E5%B7%A5%E7%A8%8B%E7%89%88%E6%9C%AC%E7%AE%A1%E7%90%86%E6%96%B9%E6%A1%88 ...
- 什么是哈希码(HashCode)
什么是哈希码(HashCode) 在Java中,哈希码代表对象的特征. 例如对象 String str1 = “aa”, str1.hashCode= 3104 String str2 = “bb”, ...