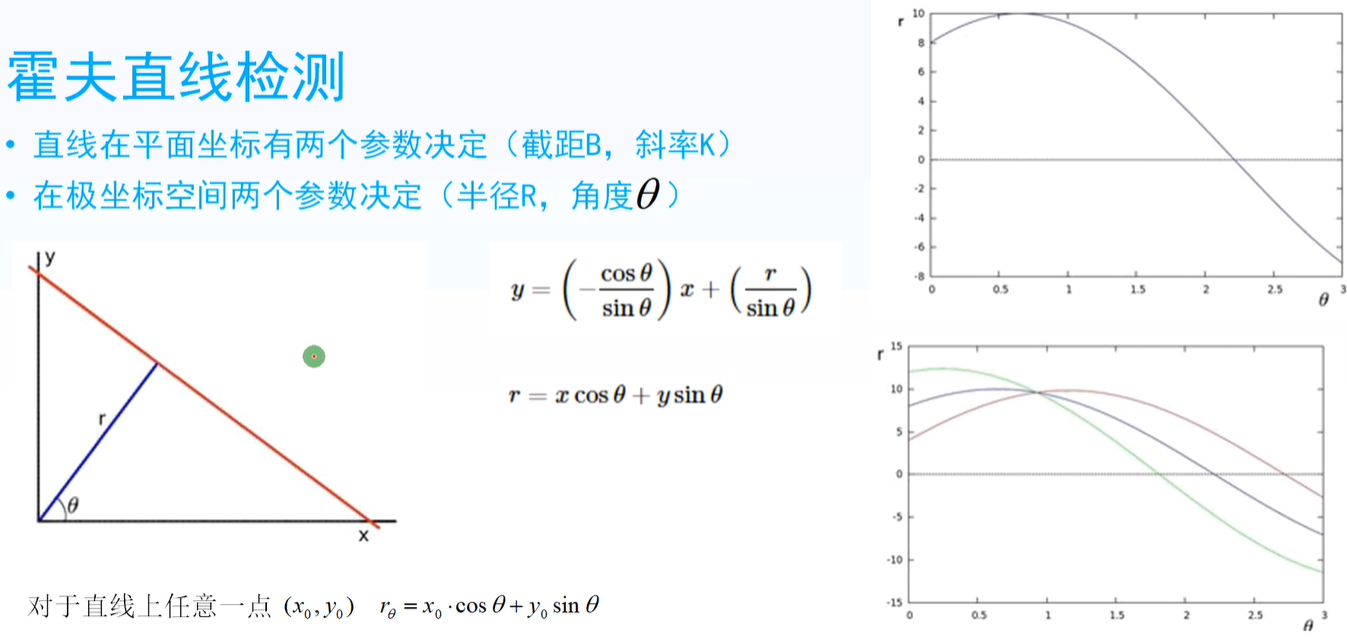
opencv:霍夫直线检测

#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
void hough_linesp_demo();
int main(int argc, char** argv)
{
Mat src = imread("f:/images/qq/tline.png");
//Mat src = imread("f:/images/qq/yezi.png");
if (src.empty())
{
printf("Could not find the image!\n");
return -1;
}
namedWindow("input", WINDOW_AUTOSIZE);
imshow("input", src);
// 做一个高斯模糊,消除一些细微的东西
//GaussianBlur(src, src, Size(3, 3), 0);
Mat gray, binary;
cvtColor(src, gray, COLOR_BGR2GRAY);
imshow("gray", gray);
// 二值化
threshold(gray, binary, 0, 255, THRESH_BINARY | THRESH_OTSU);
imshow("binary", binary);
// 霍夫直线检测
vector<Vec3f> lines;
HoughLines(binary, lines, 1, CV_PI / 180.0, 100, 0, 0);
// 绘制直线
Point pt1, pt2;
for (size_t i = 0; i < lines.size(); i++) {
float rho = lines[i][0]; // 距离
float theta = lines[i][1]; // 角度
float acc = lines[i][2]; // 累加值
printf("rho: %.2f, thrta: %.2f, acc: %.2f\n", rho, theta, acc);
double a = cos(theta);
double b = sin(theta);
double x0 = a * rho, y0 = b * rho;
pt1.x = cvRound(x0 + 1000 * (-b));
pt1.y = cvRound(y0 + 1000 * (a));
pt2.x = cvRound(x0 - 1000 * (-b));
pt2.y = cvRound(y0 - 1000 * (a));
int angle = round((theta / CV_PI) * 180);
if (rho > 0) { //右倾
line(src, pt1, pt2, Scalar(0, 0, 255), 2, 8, 0);
if (angle == 90) { // 水平线
line(src, pt1, pt2, Scalar(0, 255, 255), 2, 8, 0);
}
if (angle < 1) { // 近似垂直线
line(src, pt1, pt2, Scalar(255, 255, 0), 2, 8, 0);
}
}
else { // 左倾
line(src, pt1, pt2, Scalar(255, 0, 0), 2, 8, 0);
}
}
imshow("hough line detection", src);
hough_linesp_demo();
waitKey(0);
destroyAllWindows();
return 0;
}
void hough_linesp_demo() {
Mat src = imread("f:/images/qq/tline.png");
Mat gray, binary;
Canny(src, binary, 80, 160, 3, false);
imshow("canny binary", binary);
vector<Vec4i> lines;
HoughLinesP(binary, lines, 1, CV_PI / 180, 80, 30, 10);
Mat result = Mat::zeros(src.size(), src.type());
for (int i = 0; i < lines.size(); i++) {
line(result, Point(lines[i][0], lines[i][1]), Point(lines[i][2], lines[i][3]), Scalar(0, 0, 255), 2, 8, 0);
}
imshow("hough linesp demo", result);
}
opencv:霍夫直线检测的更多相关文章
- Android开发中的OpenCV霍夫直线检测(Imgproc.HoughLines()&Imgproc.HoughLinesP())
本文为作者原创,转载请注明出处(http://www.cnblogs.com/mar-q/)by 负赑屃 //2017-04-21更新: 很多网友希望能得到源码,由于在公司做的,所以不太方便传出来 ...
- 霍夫直线检测 opencv
本次实验是检测图像中的直线,用到了HoughLines()和HoughLinesP()函数,其中HoughLinesP()称为累计概率霍夫变换,实验结果显示累计概率霍夫变换要比标准霍夫变换的效果好.具 ...
- OpenCV-Python 霍夫直线检测-HoughLinesP函数参数
cv2.HoughLines()函数是在二值图像中查找直线,cv2.HoughLinesP()函数可以查找直线段. cv2.HoughLinesP()函数原型: HoughLinesP(image, ...
- opencv python:直线检测 与 圆检测
霍夫直线变换介绍 霍夫圆检测 现实中: example import cv2 as cv import numpy as np # 关于霍夫变换的相关知识可以看看这个博客:https://blog.c ...
- OpenCV——霍夫变换(直线检测、圆检测)
x #include <opencv2/opencv.hpp> #include <iostream> #include <math.h> using namesp ...
- opencv::霍夫圆变换
霍夫圆检测原理 从平面坐标到极坐标转换三个参数 假设平面坐标的任意一个圆上的点,转换到极坐标中: 处有最大值,霍夫变换正是利用这个原理实现圆的检测. cv::HoughCircles 因为霍夫圆检测对 ...
- 霍夫圆检测 opencv
进行霍夫圆变换中有一个API:HoughCircles(). 第五个参数为double类型的minDist(),为霍夫变换检测到的圆的圆心之间的最小距离,即让算法能明显区分的两个不同圆之间的最小距离. ...
- opencv:霍夫圆检测
#include <opencv2/opencv.hpp> #include <iostream> using namespace cv; using namespace st ...
- OpenCV 霍夫线变换
#include "opencv2/highgui/highgui.hpp" #include "opencv2/imgproc/imgproc.hpp" #i ...
随机推荐
- Python入门11 —— 基本数据类型的操作
一:数字类型:int.float字类型 1.操作: 比较运算:int与float之间是可以比较大小 数学运算:+-*/,int与float之间也可以进行数学运算 print(10 > 3.1) ...
- Hadoop的安装(2)---Hadoop配置
一:安装JDK hadoop2.x最低jdk版本要求是:jdk1.7(不过推荐用最新的:jdk1.8,因为jdk是兼容旧版本的,而且我们使用的其他软件可能要求的jdk版本较高) 下载地址:https: ...
- vjudge 最大公约数GCD 直接求最大共约束和最小公倍数的指令
原题链接https://vjudge.net/contest/331993#problem/C 输入2个正整数A,B,求A与B的最大公约数. Input2个数A,B,中间用空格隔开.(1<= A ...
- UVa - 12050 Palindrome Numbers (二分)
Solve the equation: p ∗ e −x + q ∗ sin(x) + r ∗ cos(x) + s ∗ tan(x) + t ∗ x 2 + u = 0 where 0 ≤ x ≤ ...
- rp算法 随机化 刷题记录
刷随机化是真的会上瘾quq 洛谷P3973 [TJOI2015]线性代数 看oiwiki上说可以随机化...于是... 就随机在a[i]上选一位取反,然后更新答案,最后输出答案. ...无话可说 代码 ...
- Electron – 基础学习(1): 环境安装、创建项目及入门
这几天到年底了,公司也没啥事,闲着就到处瞅瞅.记得上一家公司的时候用 Electron+ng1 写过项目,只是那个时候项目框架都是别人搭的,自己只负责写功能,对Electron没啥认识. 这几天想着反 ...
- bash数学运算之bc
一.expr 1.1 语法 注意必须有空格 只能精确到整数,无法精确到浮点数 1.2 操作符对照表 使用expr命令时需要加\进行转义,因为部分符号是保留关键字 例1:比较num1跟num2的大小 [ ...
- 用Object.prototype.toString.call(obj)检测对象类型原因分析
用Object.prototype.toString.call(obj)检测对象类型原因分析 更新时间:2018年10月11日 08:46:33 投稿:laozhang 我要评论 在本 ...
- 关于微信小程序
1.设置了tabBar的页面,好像用navigator跳不过去.
- AspxDashBorad_OnDashboardLoaded 获取对应的DashboardParameter
protected void ASPxDashboardViewerThrend_OnDashboardLoaded(object sender, DashboardLoadedWebEventArg ...