ROS naviagtion analysis: costmap_2d--Costmap2D
博客转载自:https://blog.csdn.net/u013158492/article/details/50492506
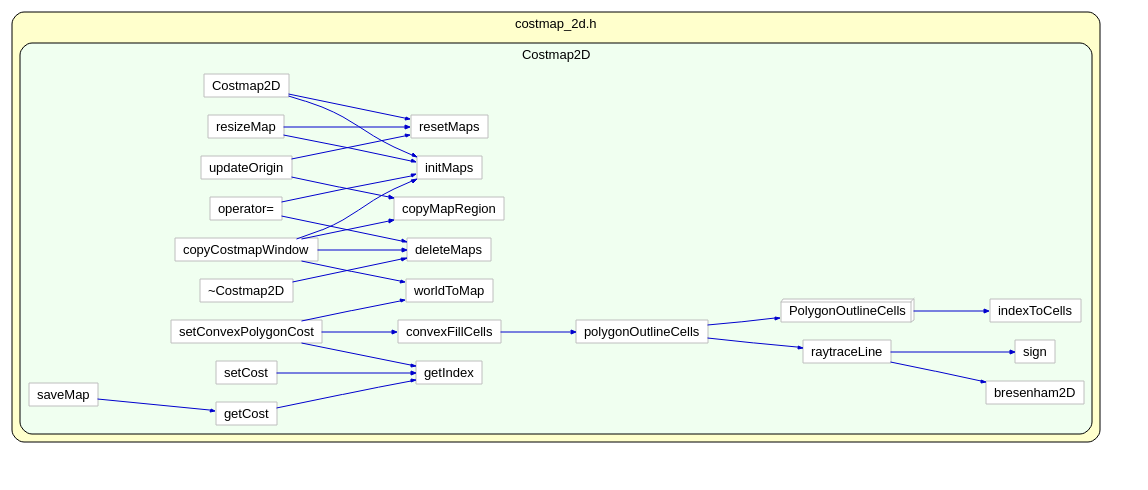
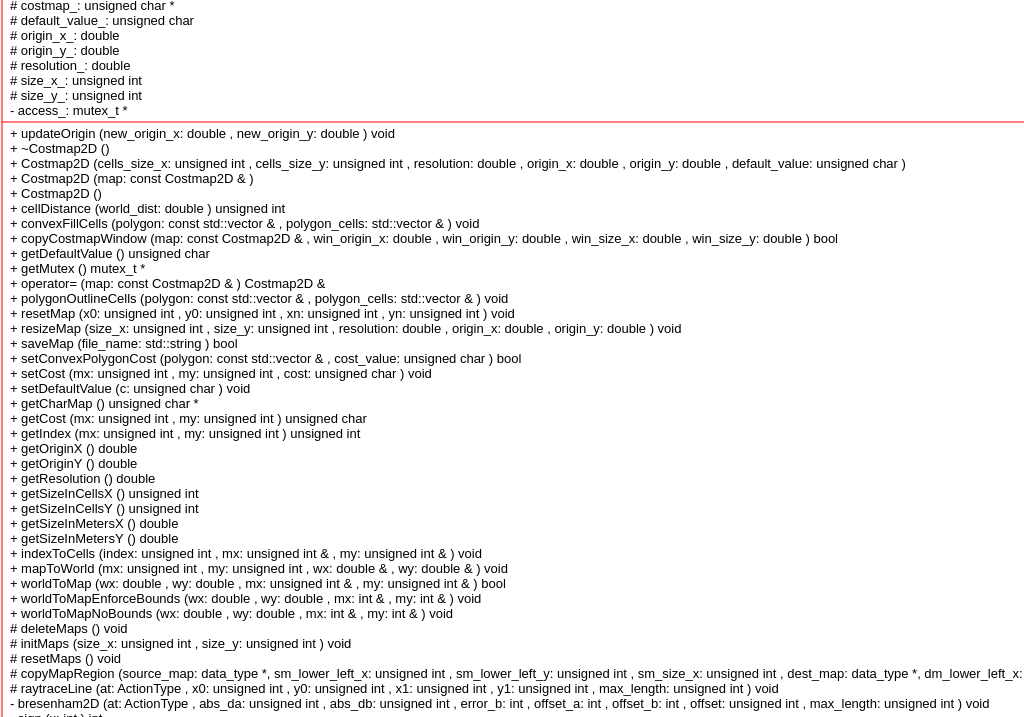
Costmap2D是存储地图数据的父类。真正的地图数据就存储在数据成员unsigned char *costmap_ 。
首先,分析类的构造函数:,默认构造函数:Costmap2D::Costmap2D()
// just initialize everything to NULL by default
Costmap2D::Costmap2D() :
size_x_(0), size_y_(0), resolution_(0.0), origin_x_(0.0), origin_y_(0.0), costmap_(NULL)
{
access_ = new mutex_t();
}
带参数的构造函数:Costmap2D::Costmap2D(unsigned int cells_size_x, unsigned int cells_size_y, double resolution, double origin_x, double origin_y, unsigned char default_value)
Costmap2D::Costmap2D(unsigned int cells_size_x, unsigned int cells_size_y, double resolution,
double origin_x, double origin_y, unsigned char default_value) :
size_x_(cells_size_x), size_y_(cells_size_y), resolution_(resolution), origin_x_(origin_x),
origin_y_(origin_y), costmap_(NULL), default_value_(default_value)
{
access_ = new mutex_t(); // create the costmap
initMaps(size_x_, size_y_);
resetMaps();
}
Copy 构造函数:Costmap2D::Costmap2D(const Costmap2D& map)
Costmap2D::Costmap2D(const Costmap2D& map) :
costmap_(NULL)
{
access_ = new mutex_t();
*this = map;
}
Assignment 构造函数:Costmap2D& Costmap2D::operator=(const Costmap2D& map)
Costmap2D& Costmap2D::operator=(const Costmap2D& map)
{
// check for self assignement
if (this == &map)
return *this; // clean up old data
deleteMaps(); size_x_ = map.size_x_;
size_y_ = map.size_y_;
resolution_ = map.resolution_;
origin_x_ = map.origin_x_;
origin_y_ = map.origin_y_; // initialize our various maps
initMaps(size_x_, size_y_); // copy the cost map
memcpy(costmap_, map.costmap_, size_x_ * size_y_ * sizeof(unsigned char)); return *this;
}
每次对costmap_ 操作都需要上锁access_=new mutex_t(), ‘mutex_t’ 实际定义是typedef boost::recursive_mutex mutex_t递归锁。
函数Costmap2D::setConvexPolygonCost:
首先将机器人坐标系下的机器人轮廓点,全部转到地图坐标系下
// we assume the polygon is given in the global_frame... we need to transform it to map coordinates
std::vector<MapLocation> map_polygon;
for (unsigned int i = 0; i < polygon.size(); ++i)
{
MapLocation loc;
if (!worldToMap(polygon[i].x, polygon[i].y, loc.x, loc.y))
{
// ("Polygon lies outside map bounds, so we can't fill it");
return false;
}
map_polygon.push_back(loc);
}
然后通过下面的调用,得到在polygon内部的全部cell,存储在polygon_cells
std::vector<MapLocation> polygon_cells;
// get the cells that fill the polygon
// this function is to get all the cells inside the polygon
convexFillCells(map_polygon, polygon_cells);
然后获取这些内部cell的index,再对地图costmap_ 遍历进行赋值操作:
// set the cost of those cells
for (unsigned int i = 0; i < polygon_cells.size(); ++i)
{
unsigned int index = getIndex(polygon_cells[i].x, polygon_cells[i].y);
costmap_[index] = cost_value;
}
那么问题 来了,convexFillCells(map_polygon, polygon_cells); 是怎么获取到的全部的内部点的呢?
// first get the cells that make up the outline of the polygon
// this function will get the edges along the polygon
polygonOutlineCells(polygon, polygon_cells);
首先获得轮廓点之间连线的cell的列表。然后对这些边缘点做一次排序:
MapLocation swap;
unsigned int i = 0;
while (i < polygon_cells.size() - 1)
{
if (polygon_cells[i].x > polygon_cells[i + 1].x)
{
swap = polygon_cells[i];
polygon_cells[i] = polygon_cells[i + 1];
polygon_cells[i + 1] = swap; if (i > 0)
--i;
}
else
++i;
}
操作完成后得到的polygon_cells 的cell都按照x坐标从小到大排序好了。然后开始沿着x轴,对每个相同的x,检查y值,获取y值最大的和y值最小的polygoncell:
while (i < polygon_cells.size() && polygon_cells[i].x == x)
{
if (polygon_cells[i].y < min_pt.y)
min_pt = polygon_cells[i];
else if (polygon_cells[i].y > max_pt.y)
max_pt = polygon_cells[i];
++i;
}
最后将y最大的和y最小的整个列的所有cell全部都塞进polygon_cells去:
MapLocation pt;
// loop though cells in the column
for (unsigned int y = min_pt.y; y < max_pt.y; ++y)
{
pt.x = x;
pt.y = y;
polygon_cells.push_back(pt);
}
回到刚才,根据轮廓点,就能获得轮廓点连线的全部的边缘点函数polygonOutlineCells:
void Costmap2D::polygonOutlineCells(const std::vector<MapLocation>& polygon, std::vector<MapLocation>& polygon_cells)
{
PolygonOutlineCells cell_gatherer(*this, costmap_, polygon_cells);
for (unsigned int i = 0; i < polygon.size() - 1; ++i)
{
raytraceLine(cell_gatherer, polygon[i].x, polygon[i].y, polygon[i + 1].x, polygon[i + 1].y);
}
if (!polygon.empty())
{
unsigned int last_index = polygon.size() - 1;
// we also need to close the polygon by going from the last point to the first
raytraceLine(cell_gatherer, polygon[last_index].x, polygon[last_index].y, polygon[0].x, polygon[0].y);
}
}
主要的被调用的函数如下,它调用了bresenham2D 函数,这个算法实现了 对于离散的平面点,指定两个点,找到两点之间的其他点,使得这些中间组成一个尽可能趋近直线的点集。
template<class ActionType>
inline void raytraceLine(ActionType at, unsigned int x0, unsigned int y0, unsigned int x1, unsigned int y1,unsigned int max_length = UINT_MAX)
函数bool Costmap2D::saveMap(std::string file_name) 执行将costmap2D类中的costmap_这个指针指向的数据全部存储成文件。由于数据本身是一维的,所以需要在文件开头写入x,y的各自size值,另外加上一个分隔符0xff与地图数据分开。
Costmap2D 类分析就是这么多,相比之前的简单得多,毕竟主要是作为父类,供obstacle ,inflation,static, voxel继承用的。
ROS naviagtion analysis: costmap_2d--Costmap2D的更多相关文章
- ROS naviagtion analysis: costmap_2d--ObstacleLayer
博客转载自:https://blog.csdn.net/u013158492/article/details/50493676 构造函数 ObstacleLayer() { costmap_ = NU ...
- ROS naviagtion analysis: costmap_2d--StaticLayer
博客转载自:https://blog.csdn.net/u013158492/article/details/50493246 从UML中能够看到,StaticLayer主要是在实现Layer层要求实 ...
- ROS naviagtion analysis: costmap_2d--Costmap2DROS
博客转载自:https://blog.csdn.net/u013158492/article/details/50485418 在上一篇文章中moveBase就有关于costmap_2d的使用: pl ...
- ROS naviagtion analysis: move_base
博客转载自:https://blog.csdn.net/u013158492/article/details/50483123 这是navigation的第一篇文章,主要通过分析ROS代码级实现,了解 ...
- ROS naviagtion analysis: costmap_2d--CostmapLayer
博客转自:https://blog.csdn.net/u013158492/article/details/50493220 这个类是为ObstacleLayer StaticLayer voxelL ...
- ROS naviagtion analysis: costmap_2d--LayeredCostmap
博客转自:https://blog.csdn.net/u013158492/article/details/50490490 在数据成员中,有两个重要的变量:Costmap2D costmap_和 s ...
- ROS naviagtion analysis: costmap_2d--Layer
博客转载自:https://blog.csdn.net/u013158492/article/details/50493113 这个类中有一个LayeredCostmap* layered_costm ...
- costmap_2d 解析
costmap_2d这个包提供了一种2D代价地图的实现方案,该方案利用输入的传感器数据,构建数据2D或者3D代价地图(取决于是否使用基于voxel的实现),并根据占用网格和用户定义的膨胀半径计算2D代 ...
- ROS 教程之 navigation :在 catkin 环境下创建costmap layer plugin
在做机器人导航的时候,肯定见到过global_costmap和local_costmap.global_costmap是为了全局路径规划服务的,如从这个房间到那个房间该怎么走.local_costma ...
随机推荐
- 使用OpenCV对图像进行缩放
OpenCV:图片缩放和图像金字塔 对图像进行缩放的最简单方法当然是调用resize函数啦! resize函数可以将源图像精确地转化为指定尺寸的目标图像. 要缩小图像,一般推荐使用CV_INETR_A ...
- verilog 2001中的一些新语法
比较有用的:1,generate语句,但需注意,generate-for中变量范围是已知的确定值, generate-case,generate-if语句中变量都必须是固定的, generate必须跟 ...
- LA3218 Find the Border
题意 PDF 分析 虽然只找外轮廓,但是时间复杂度不比PSLG优秀,所以可以当做联系PSLG的题做. PSLG框架 找出所有交点 交点按序连边 把边按极角序排序 逆时针找圈 然后何以会顺时针找出无限区 ...
- bzoj 2946 [Poi2000]公共串——后缀自动机
题目:https://www.lydsy.com/JudgeOnline/problem.php?id=2946 对每个串都建一个后缀自动机,然后 dfs 其中一个自动机,记录同步的话在别的自动机上走 ...
- 关于.NET中的Session
Asp.net 默认配置下,Session莫名丢失的原因及解决办法正常操作情况下Session会无故丢失.因为程序是在不停的被操作,排除Session超时的可能.另外,Session超时时间被设定成6 ...
- android签名生成和发布
首先,我们需要一个keystore,当然已经有了的话就不用这一步了:cmd下:进入到jdk的bin目录,这样的话,android.keystore文件就会生成在这个目录下,签名的时候我们需要这个文件C ...
- java多线程练习实例
总结: 循环的使用率蛮高,Thraed.sleep(),try-catch语句 package com.aa; public class West { public static void main( ...
- PHP定时任务Crontab结合CLI模式详解
从版本 4.3.0 开始,PHP 提供了一种新类型的 CLI SAPI(Server Application Programming Interface,服务端应用编程端口)支持,名为 CLI,意为 ...
- Oracle 错误: sp2 0734 unknown command beginning -- 解决方法
今天在做一个Oracle的倒库操作,使用SQLPLUS倒库的时候发生SP2 0734的错误 !! 注:我是用的是Ocale11g自带的SQLPLUS 由于之前在工具(SQL Developer)里面运 ...
- (转) 读懂IL
引言 转自园子里的一片关于IL的好文,分享的同时,方便自己今后查阅. 原文链接:http://www.cnblogs.com/brookshi/p/5225801.html ------ 略过作者调侃 ...