强化学习(二)马尔科夫决策过程(MDP)
在强化学习(一)模型基础中,我们讲到了强化学习模型的8个基本要素。但是仅凭这些要素还是无法使用强化学习来帮助我们解决问题的, 在讲到模型训练前,模型的简化也很重要,这一篇主要就是讲如何利用马尔科夫决策过程(Markov Decision Process,以下简称MDP)来简化强化学习的建模。
MDP这一篇对应Sutton书的第三章和UCL强化学习课程的第二讲。
1. 强化学习引入MDP的原因
强化学习的8个要素我们在第一节已经讲了。其中的第七个是环境的状态转化模型,它可以表示为一个概率模型,即在状态$s$下采取动作$a$,转到下一个状态$s'$的概率,表示为$P_{ss'}^a$。
如果按照真实的环境转化过程看,转化到下一个状态$s'$的概率既与上一个状态$s$有关,还与上上个状态,以及上上上个状态有关。这一会导致我们的环境转化模型非常复杂,复杂到难以建模。因此我们需要对强化学习的环境转化模型进行简化。简化的方法就是假设状态转化的马尔科夫性,也就是假设转化到下一个状态$s'$的概率仅与上一个状态$s$有关,与之前的状态无关。用公式表示就是:$$P_{ss'}^a = \mathbb{E}(S_{t+1}=s'|S_t=s, A_t=a)$$
对于马尔科夫性本身,我之前讲过的隐马尔科夫模型HMM(一)HMM模型,条件随机场CRF(一)从随机场到线性链条件随机场以及MCMC(二)马尔科夫链都有讲到。它本身是一个比较简单的假设,因此这里就不专门对“马尔可夫性”做专门的讲述了。
除了对于环境的状态转化模型这个因素做马尔科夫假设外,我们还对强化学习第四个要素个体的策略(policy)$\pi$也做了马尔科夫假设。即在状态$s$时采取动作$a$的概率仅与当前状态$s$有关,与其他的要素无关。用公式表示就是$$\pi(a|s) = P(A_t=a | S_t=s)$$
对于第五个要素,价值函数$v_{\pi}(s)$也是一样, $v_{\pi}(s)$现在仅仅依赖于当前状态了,那么现在价值函数$v_{\pi}(s)$表示为:$$v_{\pi}(s) = \mathbb{E}_{\pi}(G_t|S_t=s ) = \mathbb{E}_{\pi}(R_{t+1} + \gamma R_{t+2} + \gamma^2R_{t+3}+...|S_t=s)$$
其中,$G_t$代表收获(return), 是一个MDP中从某一个状态$S_t$开始采样直到终止状态时所有奖励的有衰减的之和。
2. MDP的价值函数与贝尔曼方程
对于MDP,我们在第一节里已经讲到了它的价值函数$v_{\pi}(s)$的表达式。但是这个表达式没有考虑到所采用的动作$a$带来的价值影响,因此我们除了$v_{\pi}(s)$这个状态价值函数外,还有一个动作价值函数$q_{\pi}(s,a)$,即:$$q_{\pi}(s,a) = \mathbb{E}_{\pi}(G_t|S_t=s, A_t=a) = \mathbb{E}_{\pi}(R_{t+1} + \gamma R_{t+2} + \gamma^2R_{t+3}+...|S_t=s,A_t=a)$$
根据价值函数的表达式,我们可以推导出价值函数基于状态的递推关系,比如对于状态价值函数$v_{\pi}(s)$,可以发现:$$\begin{align} v_{\pi}(s) &= \mathbb{E}_{\pi}(R_{t+1} + \gamma R_{t+2} + \gamma^2R_{t+3}+...|S_t=s) \\ &= \mathbb{E}_{\pi}(R_{t+1} + \gamma (R_{t+2} + \gamma R_{t+3}+...)|S_t=s) \\ &= \mathbb{E}_{\pi}(R_{t+1} + \gamma G_{t+1} | S_t=s) \\ &= \mathbb{E}_{\pi}(R_{t+1} + \gamma v_{\pi}(S_{t+1}) | S_t=s) \end{align}$$
也就是说,在$t$时刻的状态$S_t$和$t+1$时刻的状态$S_{t+1}$是满足递推关系的,即:$$v_{\pi}(s) = \mathbb{E}_{\pi}(R_{t+1} + \gamma v_{\pi}(S_{t+1}) | S_t=s) $$
这个递推式子我们一般将它叫做贝尔曼方程。这个式子告诉我们,一个状态的价值由该状态的奖励以及后续状态价值按一定的衰减比例联合组成。
同样的方法,我们可以得到动作价值函数$q_{\pi}(s,a)$的贝尔曼方程:$$q_{\pi}(s,a) = \mathbb{E}_{\pi}(R_{t+1} + \gamma q_{\pi}(S_{t+1},A_{t+1}) | S_t=s, A_t=a) $$
3. 状态价值函数与动作价值函数的递推关系
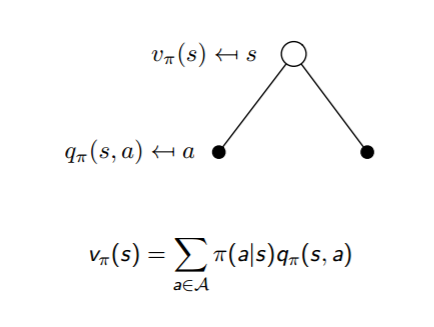
根据动作价值函数$q_{\pi}(s,a)$和状态价值函数$v_{\pi}(s)$的定义,我们很容易得到他们之间的转化关系公式:$$v_{\pi}(s) = \sum\limits_{a \in A} \pi(a|s)q_{\pi}(s,a)$$
也就是说,状态价值函数是所有动作价值函数基于策略$\pi$的期望。通俗说就是某状态下所有状态动作价值乘以该动作出现的概率,最后求和,就得到了对应的状态价值。
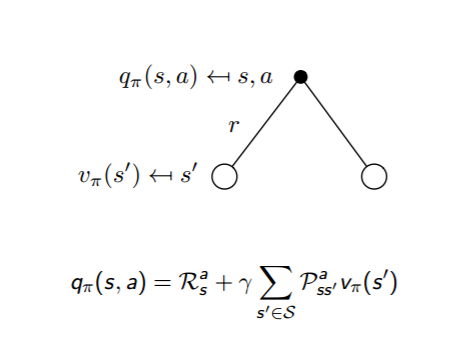
反过来,利用上贝尔曼方程,我们也很容易从状态价值函数$v_{\pi}(s)$表示动作价值函数$q_{\pi}(s,a)$,即:$$q_{\pi}(s,a) = R_s^a + \gamma \sum\limits_{s' \in S}P_{ss'}^av_{\pi}(s')$$
通俗说就是状态动作价值有两部分相加组成,第一部分是即时奖励,第二部分是环境所有可能出现的下一个状态的概率乘以该下一状态的状态价值,最后求和,并加上衰减。
这两个转化过程也可以从下图中直观的看出:
把上面两个式子互相结合起来,我们可以得到:
$$v_{\pi}(s) = \sum\limits_{a \in A} \pi(a|s)(R_s^a + \gamma \sum\limits_{s' \in S}P_{ss'}^av_{\pi}(s'))$$
$$q_{\pi}(s,a) = R_s^a + \gamma \sum\limits_{s' \in S}P_{ss'}^a\sum\limits_{a' \in A} \pi(a'|s')q_{\pi}(s',a')$$
4. 最优价值函数
解决强化学习问题意味着要寻找一个最优的策略让个体在与环境交互过程中获得始终比其它策略都要多的收获,这个最优策略我们可以用 $\pi^{*}$表示。一旦找到这个最优策略$\pi^{*}$,那么我们就解决了这个强化学习问题。一般来说,比较难去找到一个最优策略,但是可以通过比较若干不同策略的优劣来确定一个较好的策略,也就是局部最优解。
如何比较策略的优劣呢?一般是通过对应的价值函数来比较的,也就是说,寻找较优策略可以通过寻找较优的价值函数来完成。可以定义最优状态价值函数是所有策略下产生的众多状态价值函数中的最大者,即:$$v_{*}(s) = \max_{\pi}v_{\pi}(s)$$
同理也可以定义最优动作价值函数是所有策略下产生的众多动作状态价值函数中的最大者,即:$$q_{*}(s,a) = \max_{\pi}q_{\pi}(s,a)$$
对于最优的策略,基于动作价值函数我们可以定义为:$$\pi_{*}(a|s)= \begin{cases} 1 & {if\;a=\arg\max_{a \in A}q_{*}(s,a)}\\ 0 & {else} \end{cases}$$
只要我们找到了最大的状态价值函数或者动作价值函数,那么对应的策略$\pi^{*}$就是我们强化学习问题的解。同时,利用状态价值函数和动作价值函数之间的关系,我们也可以得到:$$v_{*}(s) = \max_{a}q_{*}(s,a) $$
反过来的最优价值函数关系也很容易得到:$$q_{*}(s,a) = R_s^a + \gamma \sum\limits_{s' \in S}P_{ss'}^av_{*}(s')$$
利用上面的两个式子也可以得到和第三节末尾类似的式子:
$$v_{*}(s) = \max_a(R_s^a + \gamma \sum\limits_{s' \in S}P_{ss'}^av_{*}(s'))$$
$$q_{*}(s,a) = R_s^a + \gamma \sum\limits_{s' \in S}P_{ss'}^a\max_{a'}q_{*}(s',a')$$
5. MDP实例
上面的公式有点多,需要一些时间慢慢消化,这里给出一个UCL讲义上实际的例子,首先看看具体我们如何利用给定策略来计算价值函数。
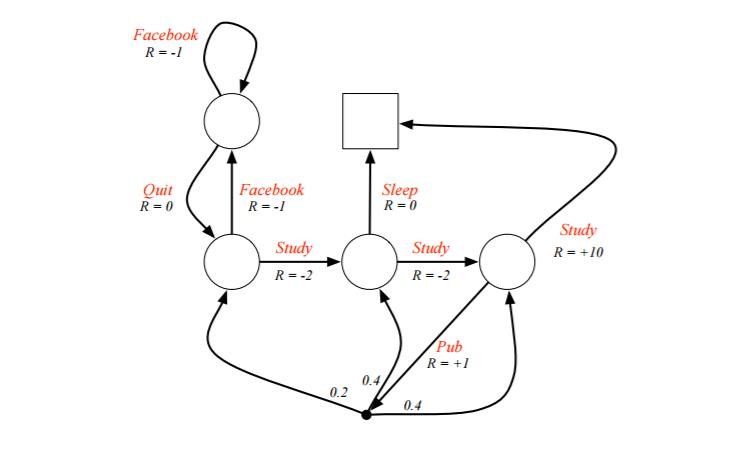
例子是一个学生学习考试的MDP。里面左下那个圆圈位置是起点,方框那个位置是终点。上面的动作有study, pub, facebook, quit, sleep,每个状态动作对应的即时奖励R已经标出来了。我们的目标是找到最优的动作价值函数或者状态价值函数,进而找出最优的策略。
为了方便,我们假设衰减因子$\gamma =1, \pi(a|s) = 0.5$。
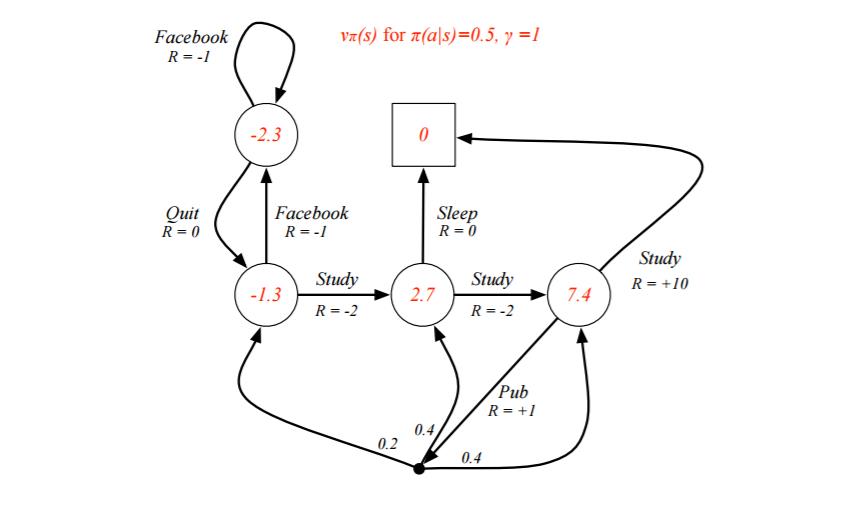
对于终点方框位置,由于其没有下一个状态,也没有当前状态的动作,因此其状态价值函数为0。对于其余四个状态,我们依次定义其价值为$v_1,v_2,v_3,v_4$, 分别对应左上,左下,中下,右下位置的圆圈。我们基于$v_{\pi}(s) = \sum\limits_{a \in A} \pi(a|s)(R_s^a + \gamma \sum\limits_{s' \in S}P_{ss'}^av_{\pi}(s'))$计算所有的状态价值函数。可以列出一个方程组。
对于$v_1$位置,我们有:$v_1 = 0.5*(-1+v_1) +0.5*(0+v_2)$
对于$v_2$位置,我们有:$v_2 = 0.5*(-1+v_1) +0.5*(-2+v_3)$
对于$v_3$位置,我们有:$v_3 = 0.5*(0+0) +0.5*(-2+v_4)$
对于$v_4$位置,我们有:$v_4 = 0.5*(10+0) +0.5*(1+0.2*v_2+0.4*v_3+0.4*v_4)$
解出这个方程组可以得到$v_1=-2.3, v_2=-1.3, v_3=2.7, v_4=7.4$, 即每个状态的价值函数如下图:
上面我们固定了策略$\pi(a|s)$,虽然求出了每个状态的状态价值函数,但是却并不一定是最优价值函数。那么如何求出最优价值函数呢?这里由于状态机简单,求出最优的状态价值函数$v_{*}(s)$或者动作价值函数$q_{*}(s,a)$比较容易。
我们这次以动作价值函数$q_{*}(s,a)$来为例求解。首先终点方框处的好求。$$q_{*}(s_3, sleep) = 0, q_{*}(s_4, study) = 10$$
接着我们就可利用$q_{*}(s,a) = R_s^a + \gamma \sum\limits_{s' \in S}P_{ss'}^a\max_{a'}q_{*}(s',a')$列方程组求出所有的$q_{*}(s,a)$。有了所有的$q_{*}(s,a)$,利用$v_{*}(s) = \max_{a}q_{*}(s,a) $就可以求出所有的$v_{*}(s)$。最终求出的所有$v_{*}(s)$和$q_{*}(s,a)$如下图:

从而我们的最优决策路径是走6->6->8->10->结束。
6. MDP小结
MDP是强化学习入门的关键一步,如果这部分研究的比较清楚,后面的学习就会容易很多。因此值得多些时间在这里。虽然MDP可以直接用方程组来直接求解简单的问题,但是更复杂的问题却没有办法求解,因此我们还需要寻找其他有效的求解强化学习的方法。
下一篇讨论用动态规划的方法来求解强化学习的问题。
(欢迎转载,转载请注明出处。欢迎沟通交流: liujianping-ok@163.com)
强化学习(二)马尔科夫决策过程(MDP)的更多相关文章
- 强化学习 1 --- 马尔科夫决策过程详解(MDP)
强化学习 --- 马尔科夫决策过程(MDP) 1.强化学习介绍 强化学习任务通常使用马尔可夫决策过程(Markov Decision Process,简称MDP)来描述,具体而言:机器处在一个环境 ...
- 【转载】 强化学习(二)马尔科夫决策过程(MDP)
原文地址: https://www.cnblogs.com/pinard/p/9426283.html ------------------------------------------------ ...
- 【强化学习】MOVE37-Introduction(导论)/马尔科夫链/马尔科夫决策过程
写在前面的话:从今日起,我会边跟着硅谷大牛Siraj的MOVE 37系列课程学习Reinforcement Learning(强化学习算法),边更新这个系列.课程包含视频和文字,课堂笔记会按视频为单位 ...
- MCMC(二)马尔科夫链
MCMC(一)蒙特卡罗方法 MCMC(二)马尔科夫链 MCMC(三)M-H采样和Gibbs采样(待填坑) 在MCMC(一)蒙特卡罗方法中,我们讲到了如何用蒙特卡罗方法来随机模拟求解一些复杂的连续积分或 ...
- 强化学习(一)—— 基本概念及马尔科夫决策过程(MDP)
1.策略与环境模型 强化学习是继监督学习和无监督学习之后的第三种机器学习方法.强化学习的整个过程如下图所示: 具体的过程可以分解为三个步骤: 1)根据当前的状态 $s_t$ 选择要执行的动作 $ a_ ...
- 用hmmlearn学习隐马尔科夫模型HMM
在之前的HMM系列中,我们对隐马尔科夫模型HMM的原理以及三个问题的求解方法做了总结.本文我们就从实践的角度用Python的hmmlearn库来学习HMM的使用.关于hmmlearn的更多资料在官方文 ...
- 机器学习理论基础学习13--- 隐马尔科夫模型 (HMM)
隐含马尔可夫模型并不是俄罗斯数学家马尔可夫发明的,而是美国数学家鲍姆提出的,隐含马尔可夫模型的训练方法(鲍姆-韦尔奇算法)也是以他名字命名的.隐含马尔可夫模型一直被认为是解决大多数自然语言处理问题最为 ...
- 隐马尔科夫模型HMM学习最佳范例
谷歌路过这个专门介绍HMM及其相关算法的主页:http://rrurl.cn/vAgKhh 里面图文并茂动感十足,写得通俗易懂,可以说是介绍HMM很好的范例了.一个名为52nlp的博主(google ...
- 隐马尔科夫模型HMM(一)HMM模型
隐马尔科夫模型HMM(一)HMM模型基础 隐马尔科夫模型HMM(二)前向后向算法评估观察序列概率 隐马尔科夫模型HMM(三)鲍姆-韦尔奇算法求解HMM参数(TODO) 隐马尔科夫模型HMM(四)维特比 ...
随机推荐
- java编程思想-第五章-某些练习题
参考https://blog.csdn.net/caroline_wendy/article/details/46844651 10&11 finalize()被调用的条件 Java1.6以下 ...
- BZOJ_1858_[Scoi2010]序列操作_线段树
BZOJ_1858_[Scoi2010]序列操作_线段树 Description lxhgww最近收到了一个01序列,序列里面包含了n个数,这些数要么是0,要么是1,现在对于这个序列有五种变换操作和询 ...
- [NOIP2014]飞扬的小鸟 D1 T3 loj2500 洛谷P1941
分析: 这是一个DP,没什么好说的,细节很烦人. DP[i][j]表示到第i个位置,高度为j点最少的次数. 转移: 当j=m时 k属于[m-h,m]都可以向DP[i][j]转移,即dp[i][j]=m ...
- UR机械臂运动学正逆解方法
最近几个月因为工作接触到了机械臂的项目,突然对机械臂运动方法产生了兴趣,也就是如何控制机械臂的位置和姿态.借用一张网上的图片,应该是ur5的尺寸.我用到的是ur3机械臂,除了尺寸不一样,各关节结构和初 ...
- 【SAP业务模式】之STO(一):业务背景和前台操作
所谓STO即两个关联公司之间的库存转储交易,一家公司发出采购订单向另一家公司做采购,然后在做发货.如此之后,两家公司有相应应收应付的票据,以及开票和发票校验等动作. STO分为一步法与两步法,因为一步 ...
- 咸鱼Chen
关于我 网名:咸鱼Chen 英文:nick chen 签名:I'm nothing but I must be everything. 标签:Python爱好(ma)者(nong),干过后端开发.算法 ...
- 第四次作业—— 性能测试(含JMeter实验)
一.回答下述问题 1.性能测试有几种类型?它们之间什么关系? 答:性能测试根据其不同的测试目的分为以下几类. (1)性能验证测试:验证系统是否达到事先已定义的系统性能指标.能否满足系统的性能需求.这种 ...
- SpringBoot之旅第二篇-配置
一.引言 虽然springboot帮我们进行了自动配置,但配置还是不可避免的,比如最简单的端口号,数据库连接.但springboot的配置一般不用xml进行配置,而是yml和properties,选择 ...
- php一致性hash算法的应用
阅读这篇博客前首先你需要知道什么是分布式存储以及分布式存储中的数据分片存储的方式有哪些? 分布式存储系统设计(2)—— 数据分片 阅读玩这篇文章后你会知道分布式存储的最优方案是使用 一致性hash算法 ...
- 激活效能,CODING 敏捷研发模块上线
昨晚,巴黎圣母院失火,而我们当中的许多人都还没来得及去欣赏它的真容.我们曾以为美好的事物会等待我们,伟大的目标也会等待我们.世事无常,唯一不变的就是变化.在软件研发领域,敏捷研发就是这么一个小步快跑来 ...