ros相机标定
没有经过校准的camera拍摄的图片是有畸变的.如下图:
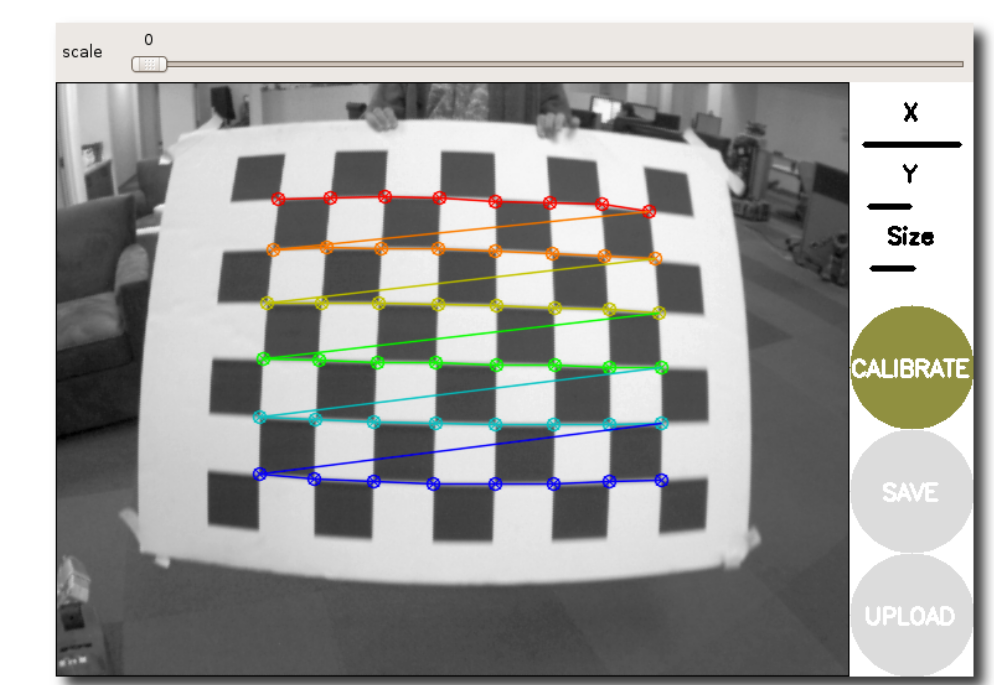
而我们希望得到的图片是这样的

ros中提供了一个程序camera_calibration帮助我们去做校准.
具体怎么校准参考
https://blog.csdn.net/xinwenfei/article/details/81235072
http://wiki.ros.org/camera_calibration/Tutorials/MonocularCalibration
首先是安装ros-kinetic-uvc-camera,运行就可以产生
/image_raw
/camera_info
两个topic. 再运行camera_calibration做校准.
校准完毕后会生成一个yaml文件
格式如下:
image_width: 2448
image_height: 2050
camera_name: prosilica
camera_matrix:
rows: 3
cols: 3
data: [4827.94, 0, 1223.5, 0, 4835.62, 1024.5, 0, 0, 1]
distortion_model: plumb_bob
distortion_coefficients:
rows: 1
cols: 5
data: [-0.41527, 0.31874, -0.00197, 0.00071, 0]
rectification_matrix:
rows: 3
cols: 3
data: [1, 0, 0, 0, 1, 0, 0, 0, 1]
projection_matrix:
rows: 3
cols: 4
data: [4827.94, 0, 1223.5, 0, 0, 4835.62, 1024.5, 0, 0, 0, 1, 0]
http://wiki.ros.org/camera_calibration_parsers 这是一个对校准文件做格式转换的程序
然后,调用摄像头驱动的程序去拍到图片的时候要去读取这个yaml文件,对拍到的图像做校准处理.这样得到的就是无畸变的图像了.
ros相机标定的更多相关文章
- 相机标定 matlab opencv ROS三种方法标定步骤(3)
三 , ROS 环境下 如何进行相机标定 刚开始做到的时候遇到一些问题没有记录下来,现在回头写的时候都是没有错误的结果了,首先使用ROS标定相机, 要知道如何查看节点之间的流程图 rosrun r ...
- 相机标定 matlab opencv ROS三种方法标定步骤(1)
一 . 理解摄像机模型,网上有很多讲解的十分详细,在这里我只是记录我的整合出来的资料和我的部分理解 计算机视觉领域中常见的三个坐标系:图像坐标系,相机坐标系,世界坐标系,实际上就是要用矩阵来表 示各个 ...
- 相机标定 matlab opencv ROS三种方法标定步骤(2)
二 ubuntu下Opencv的相机标定 一般直接用Opencv的源码就可以进行相机的标定,但是可能只是会实现结果,却不懂实现的过程,我也是模模糊糊的看了<计算机视觉中的多视图几何>以及 ...
- Opencv——相机标定
相机标定的目的:获取摄像机的内参和外参矩阵(同时也会得到每一幅标定图像的选择和平移矩阵),内参和外参系数可以对之后相机拍摄的图像就进行矫正,得到畸变相对很小的图像. 相机标定的输入:标定图像上所有内角 ...
- 相机标定简介与MatLab相机标定工具箱的使用(未涉及原理公式推导)
相机标定 一.相机标定的目的 确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,建立摄像机成像的几何模型,这些几何模型参数就是摄像机参数. 二.通用摄像机模型 世界坐标系.摄像机坐标 ...
- 相机标定:关于用Levenberg-Marquardt算法在相机标定中应用
LM算法在相机标定的应用共有三处. (1)单目标定或双目标定中,在内参固定的情况下,计算最佳外参.OpenCV中对应的函数为findExtrinsicCameraParams2. (2)单目标定中,在 ...
- OpenCV相机标定和姿态更新
原帖地址: http://blog.csdn.net/aptx704610875/article/details/48914043 http://blog.csdn.net/aptx704610875 ...
- 相机标定:kalibr标定工具箱使用总结
1 多相机标定 1.1采集图像和IMU 1.2制作Bag包 1)组织文件结构 ~/kalibr_workspace/test/stereo_calib bagsrc cam0 (1+time(0))* ...
- SLAM入门之视觉里程计(6):相机标定 张正友经典标定法详解
想要从二维图像中获取到场景的三维信息,相机的内参数是必须的,在SLAM中,相机通常是提前标定好的.张正友于1998年在论文:"A Flexible New Technique fro Cam ...
随机推荐
- R学习
R内容: R-1 基础 R-2 基础绘图 R-3 t分布--t置信区间--t检验 R-4 方差分析 R-5 相关分析-卡方分析 R-6 线性回归模型分析流程 R实战第7章 线性回归 逻辑回归 主成分分 ...
- java之Objects类
Objects类概述 在JDK7添加了一个Objects工具类,它提供了一些方法来操作对象,它由一些静态的实用方法组成,这些方法是null-save(空指针安全的)或null-tolerant(容忍空 ...
- 05-文档编辑与yum命令
一.Linux vi/vim vi是所有的Unix系统都会有,但是目前我们使用最多的是vim编辑器.vim具有程序编辑的能力,可以主动以字体颜色辨别语法的正确性. vim是从vi发展出来的一个文本编辑 ...
- Python time.time()方法
描述 Python time time()返回当前时间的时间戳. 时间戳:时间戳是指格林威治时间1970年01月01日00时00分00秒(背景时间1970年01月01日08时00分00秒)起至现在的总 ...
- 解决RubyMine中puts中文显示乱码的问题
一个简单的ruby代码,puts一个中文,显示乱码 # -*- coding: utf-8 -*- puts "你好" require_relative 'calc.rb' # r ...
- WebShell代码分析溯源(二)
WebShell代码分析溯源(二) 一.一句话变形马样本 <?php $POST['POST']='assert';$array[]=$POST;$array[0]['POST']($_POST ...
- python爬虫网页解析之parsel模块
08.06自我总结 python爬虫网页解析之parsel模块 一.parsel模块安装 官网链接https://pypi.org/project/parsel/1.0.2/ pip install ...
- python爬虫爬小说网站涉及到(js加密,CSS加密)
我是对于xxxx小说网进行爬取只讲思路不展示代码请见谅 一.涉及到的反爬 js加密 css加密 请求头中的User-Agent以及 cookie 二.思路 1.对于js加密 对于有js加密信息,我们一 ...
- CSS学习笔记_1
1.调用 内部样式表: css可以直接在html代码里面使用</style></style>节点.允许html代码中有两个style节点,但是起作用的是靠后的节点 如图的代码, ...
- 【转载】Android内存泄漏的8种可能
Java是垃圾回收语言的一种,其优点是开发者无需特意管理内存分配,降低了应用由于局部故障(segmentation fault)导致崩溃,同时防止未释放的内存把堆栈(heap)挤爆的可能,所以写出来的 ...