Cesium入门12 - Camera Modes - 相机模式
Cesium入门12 - Camera Modes - 相机模式
Cesium中文网:http://cesiumcn.org/ | 国内快速访问:http://cesium.coinidea.com/
为了展现我们的无人机飞行,让我们用相机模式进行实验。我们将保持简单的两个基本的相机模式,用户可以切换之间。
- Free Mode : 默认相机控制。
- Drone Mode : 让相机跟随无人机通过飞行在一个固定的距离。
自由模式不需要代码,因为它使用默认控件。至于无人机跟随模式,我们可以使用摄像机的内置实体跟踪功能来定位摄像机,并用偏移量定位无人机。这就使得相机即使在移动时也能从指定的实体中得到固定的偏移量。为了跟踪一个实体,我们简单地设置viewer.trackedEntity。
要切换到自由相机模式,我们可以将viewer.trackedEntity实体设置为未定义,然后使用camera.flyTo()返回到我们的Home视角。
以下是相机模式的函数:
// Create a follow camera by tracking the drone entity
function setViewMode() {
if (droneModeElement.checked) {
viewer.trackedEntity = drone;
} else {
viewer.trackedEntity = undefined;
viewer.scene.camera.flyTo(homeCameraView);
}
}
为了把这个附加到HTML输入,我们可以附加这个函数来change事件到适当的元素上:
var freeModeElement = document.getElementById('freeMode');
var droneModeElement = document.getElementById('droneMode');
// Create a follow camera by tracking the drone entity
function setViewMode() {
if (droneModeElement.checked) {
viewer.trackedEntity = drone;
} else {
viewer.trackedEntity = undefined;
viewer.scene.camera.flyTo(homeCameraView);
}
}
freeModeElement.addEventListener('change', setCameraMode);
droneModeElement.addEventListener('change', setCameraMode);
最后,当用户双击实体时,实体会被自动跟踪。如果用户通过单击开始跟踪无人机,我们可以添加一些处理来自动更新UI。
viewer.trackedEntityChanged.addEventListener(function() {
if (viewer.trackedEntity === drone) {
freeModeElement.checked = false;
droneModeElement.checked = true;
}
});
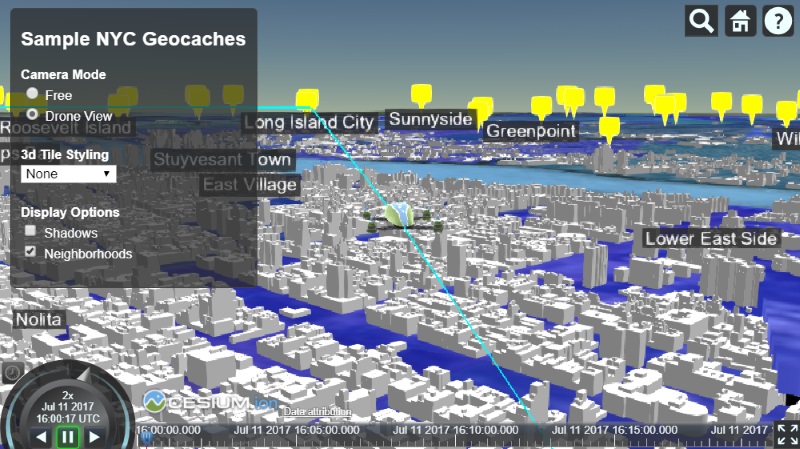
这是我们的两个相机模式-我们现在可以自由切换到无人机相机视角,看起来像这样:
Cesium中文网交流QQ群:807482793
Cesium中文网:http://cesiumcn.org/ | 国内快速访问:http://cesium.coinidea.com/
Cesium入门12 - Camera Modes - 相机模式的更多相关文章
- Cesium入门4 - 创建Cesium Viewer
Cesium入门4 - 创建Cesium Viewer Cesium中文网:http://cesiumcn.org/ | 国内快速访问:http://cesium.coinidea.com/ 任何Ce ...
- Cesium入门9 - Loading and Styling Entities - 加载和样式化实体
Cesium入门9 - Loading and Styling Entities - 加载和样式化实体 Cesium中文网:http://cesiumcn.org/ | 国内快速访问:http://c ...
- Cesium入门8 - Configuring the Scene - 配置视窗
Cesium入门8 - Configuring the Scene - 配置视窗 Cesium中文网:http://cesiumcn.org/ | 国内快速访问:http://cesium.coini ...
- HoloLens开发手记 - Unity之Locatable camera 使用相机
Enabling the capability for Photo Video Camera 启用相机能力 为了使用摄像头,我们必须启用WebCam能力. 在Unity中打开Player settin ...
- cesium 入门开发系列矢量瓦片加载展示(附源码下载)
前言 cesium 入门开发系列环境知识点了解:cesium api文档介绍,详细介绍 cesium 每个类的函数以及属性等等cesium 在线例子 内容概览 cesium 实现矢量瓦片加载效果 源代 ...
- Cesium入门-3-官方完整实例
实例核心代码 //资源访问令牌 Cesium token Cesium.Ion.defaultAccessToken='eyJhbGciOiJIUzI1NiIsInR5cCI6IkpXVCJ9.eyJ ...
- cesium入门示例-测量工具
作为cesium入门示例级别的最后一篇,参考cesium-长度测量和面积测量实现测量工具封装,修改了其中的距离测量函数,计算贴地距离,并对事件内部处理做了调整.包括贴地距离测量.面积测量.结果清除. ...
- Camera Calibration 相机标定
Camera Calibration 相机标定 一.相机标定方法 在opencv中提供了一组函数用于实现相机的标定,标定返回的值包括:相机内参矩阵(fx fy xc yc).相机外参矩阵(R t)以及 ...
- Cesium入门7 - Adding Terrain - 添加地形
Cesium入门7 - Adding Terrain - 添加地形 Cesium中文网:http://cesiumcn.org/ | 国内快速访问:http://cesium.coinidea.com ...
随机推荐
- redis查看redis 客户端状态
查看redis客户端连接 redis-cli info clients # Clients connected_clients:6000 client_longest_output_list:0 cl ...
- Linux(debian7)操作基础(四)之CPU频率调整 Linux系统CPU频率调整工具使用
在Linux中,内核的开发者定义了一套框架模型来完成CPU频率动态调整这一目的,它就是CPU Freq系统.如下为CPU的几种模式(governor参数): ondemand:系统默认的超频模式,按需 ...
- Solon 1.6.10 重要发布,现在有官网喽!
关于官网 千呼万唤始出来: https://solon.noear.org .整了一个月多了,总体样子有了...还得不断接着整! 关于 Solon Solon 是一个轻量级应用开发框架.支持 Web. ...
- Spring支持的常用数据库传播属性和事务隔离级别
一.事务的传播属性 1.propagation:用来设置事务的传播行为,一个方法运行在了一个开启了事务的方法中时,当前方法是使用原来的事务还是开启一个新的事务. (1)propagation.REQU ...
- 【LeetCode】235. Lowest Common Ancestor of a Binary Search Tree 解题报告(Java & Python)
作者: 负雪明烛 id: fuxuemingzhu 个人博客: http://fuxuemingzhu.cn/ 目录 题目描述 题目大意 解题方法 日期 [LeetCode] https://leet ...
- 【LeetCode】1150. Check If a Number Is Majority Element in a Sorted Array 解题报告(C++)
作者: 负雪明烛 id: fuxuemingzhu 个人博客:http://fuxuemingzhu.cn/ 目录 题目描述 题目大意 解题方法 字典 二分查找 日期 题目地址:https://lee ...
- 【LeetCode】476. 数字的补数 Number Complement
作者: 负雪明烛 id: fuxuemingzhu 个人博客: http://fuxuemingzhu.cn/ 公众号:负雪明烛 本文关键词:Leetcode, 力扣,476, 补数,二进制,Pyth ...
- 【LeetCode】998. Maximum Binary Tree II 解题报告(C++)
作者: 负雪明烛 id: fuxuemingzhu 个人博客: http://fuxuemingzhu.cn/ 目录 题目描述 题目大意 解题方法 递归 日期 题目地址:https://leetcod ...
- 基于React和Node.JS的表单录入系统的设计与实现
一.写在前面 这是一个真实的项目,项目已经过去好久了,虽然很简单,但还是有很多思考点,跟随着笔者的脚步,一起来看看吧.本文纯属虚构,涉及到的相关信息均已做虚构处理, 二.背景 人活着一定要有信仰,没有 ...
- git 上传项目到远程仓库
电脑安装git客户端.注册github账号并登陆 到本地项目文件夹右键选择git bash here 输入个人信息(代码提交者) git config --global user.name " ...