ABB-robotstudio离线编程-Smart组件资料-笔记
Smart组件
目录:
1.“信号与属性”子组件。
2.“参数与建模”子组件。
3.“传感器”子组件。
4.“动作”子组件。
5.“本体”子组件。
6.“其他”子组件。
一、“信号与属牲”子组件
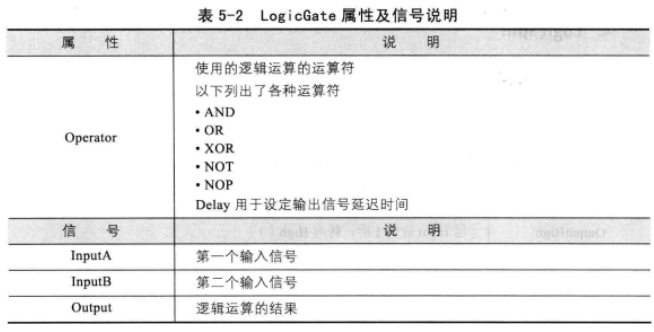
1.LogicGate
Output信号由InputA和InputB这两个信号的Operator中指定的逻辑运算设置,延迟在Delay中指定。
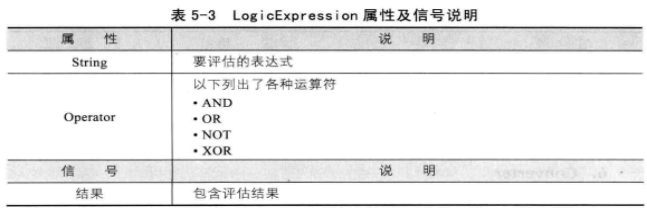
2.LogicExpression
评估逻辑表达式。
3.LogicMux
依照 Output=( Input A * NOT Selector ) + ( Input B * Selector )设定 Output。

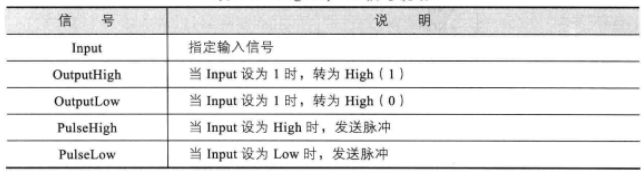
4.LogicSplit
LogicSplit 获得 Input 并将 OutputHigh 设为与 Input 相同,将 OutputLow 设为与Input相反。Input设为High时,PulseHigh发出脉冲;Input设为Low 时,PulseLow发出脉冲。
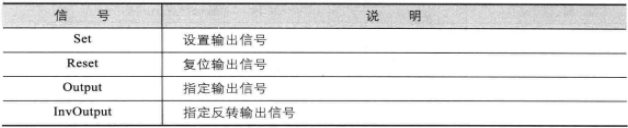
5.LogicSRLatch
用于置位/复位信号,并带锁定功能。
6. Converter
在属性值和信号值之间转换。

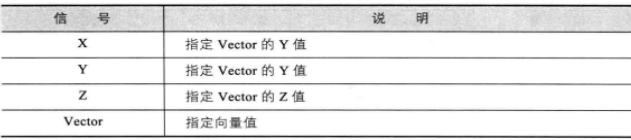
7.VectorConverter
在Vector和X、Y、Z值之间转换。
8.Expression
表达式包括数字字符(包括PI),圆括号,数学运算符s、+、-、*、/、 A (幂)和数学函数sin、cos、sqrt、atan、abs。任何其他字符串被视作变量, 作为添加的附加信息。结果将显示在Result框中。

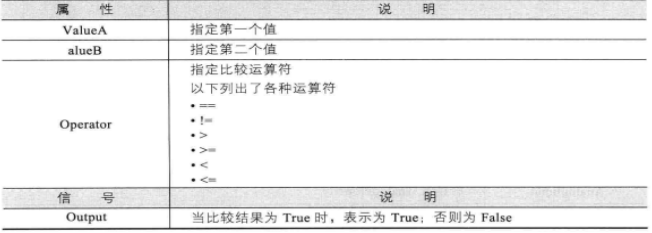
9.Comparer
Comparer使用Operator对第一个值和第二个值进行比较。当满足条件时, 将Output设为1。
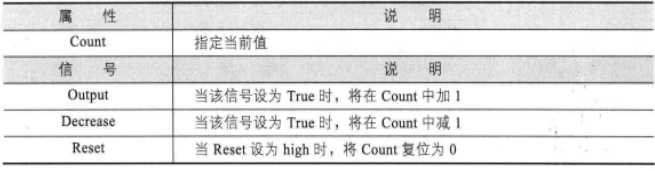
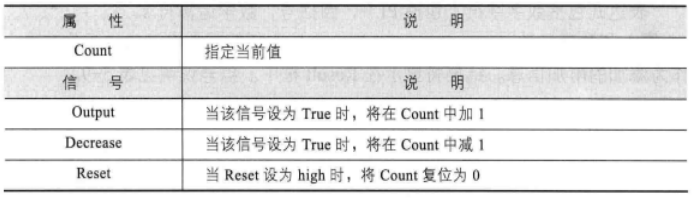
10. Counter
设置输入信号Increase时,Count增加;设置输入信号Decrease时,Count 减少;设置输入信号Reset时,Count被重置。
11.Repeater
脉冲Output信号的Count次数。
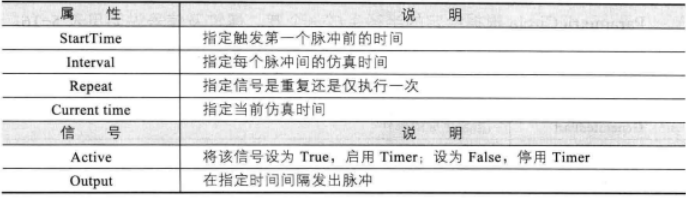
12.Timer
Timer用于指定间隔脉冲Output信号。如果未选中Repeat,在Interval中指定的间隔后将触发一个脉冲;如果选中,在Interval指定的间隔后重复触发 脉冲。
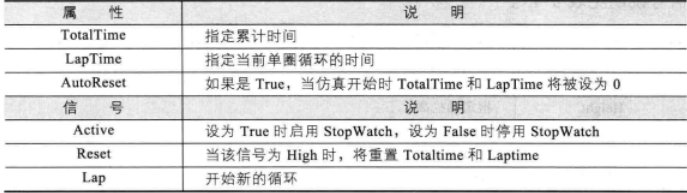
13.StopWatch
StopWatch计量了仿真的时间(TotalTime )。触发Lap输入信号将开始新的循环。LapTime显示当前单圈循环的时间。只有Active设为1时才开始计时。当设置Reset输入信号时,时间将被重置。
二、“参数与建模”子组件
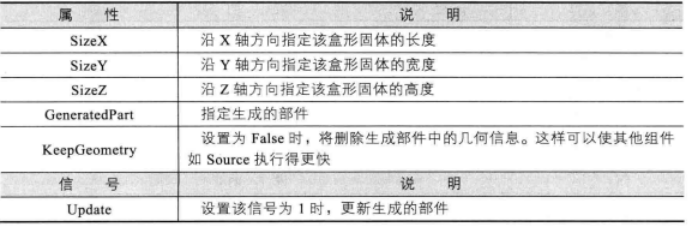
1.ParametricBox
ParametricBox生成一个指定长度、宽度和高度的方框。
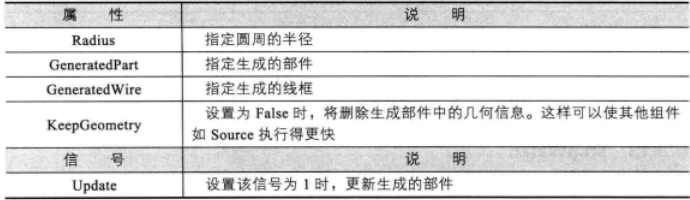
2.ParametricCircle
ParametricCircle根据给定的半径生成一个圆。
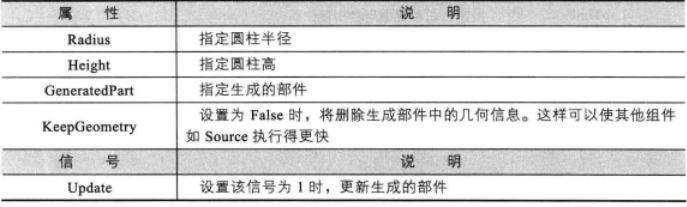
3.ParametricCylinder
ParametricCyUnder根据给定的Radius和Height生成一个圆柱体。
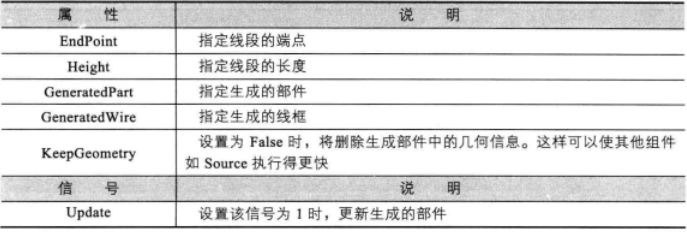
4.ParametricLine
ParametricLine根据给定端点和长度生成线段。如果端点或长度发生变化,生成的线段将随之更新。
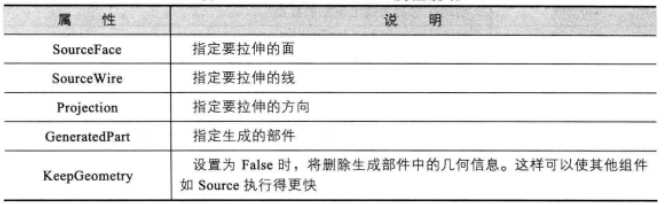
5.LinearExtrusion
LinearExtrusion 沿着 Projection 指定的方向拉伸 SourceFace或 SourceWire。
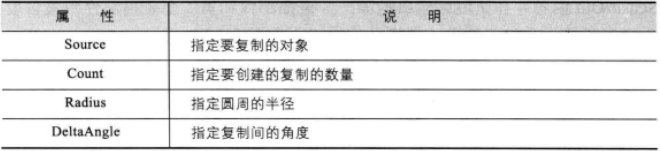
6.CircularRepeater
CircularRepeater 根据给定的 DeltaAngle 沿 SmartComponent 的中心创建一定数量的Source的复制。
7.LinearRepeater
LinearRepeater根据Offset给定的间隔和方向创建一定数量的Source的复制。

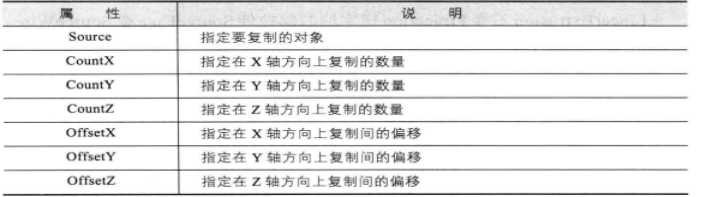
8.MatrixRepeater
MatrixRepeater在三维环境中以指定的间隔创建指定数量的Source对象的复制。
三、“传感器"子组件
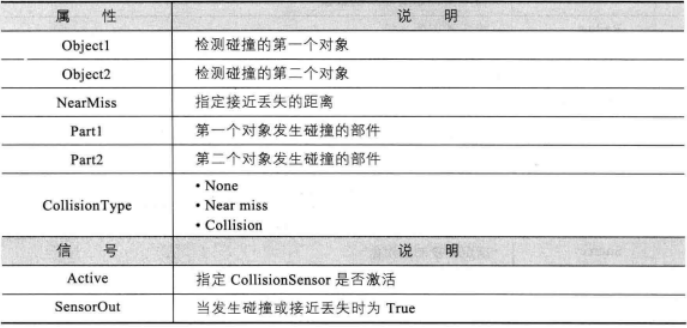
1. CollisionSensor
CollisionSensor检测第一个对象和第二个对象间的碰撞和接近丢失。如果其中一个对象没有指定,将检测另外一个对象在整个工作站中的碰撞。当 Active信号为High、发生碰撞或接近丢失并且组件处于活动状态时,设置 SensorOnt信号并在属性编辑器的第一个碰撞部件和第二个碰撞部件中报告发生碰撞或接近丢失的部件。
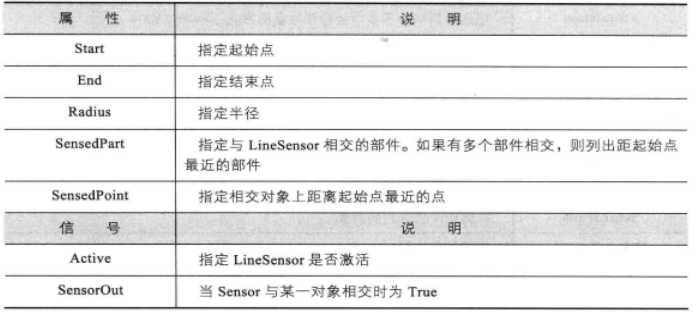
2.LineSensor
LineSensor 根据 Start、End 和 Radius 定义一条线段。当 Active 信号为 High时,传感器将检测与该线段相交的对象。相交的对象显示在ClosestPart属性中,距线传感器起点最近的相交点显示在ClosestPoint属性中。出现相交时, 会设置SensorOut输出信号。
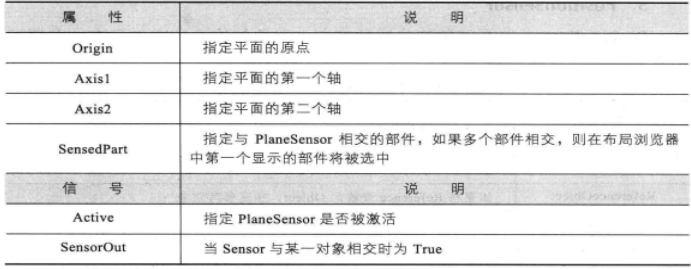
3. PlaneSensor
PlaneSensor通过Origin、Axisl和Axis2定义平面。设置Active输入信号时,传感器会检测与平面相交的对象。相交的对象将显示在SensedPart属性中。出现相交时,将设置SensorOut输出信号。
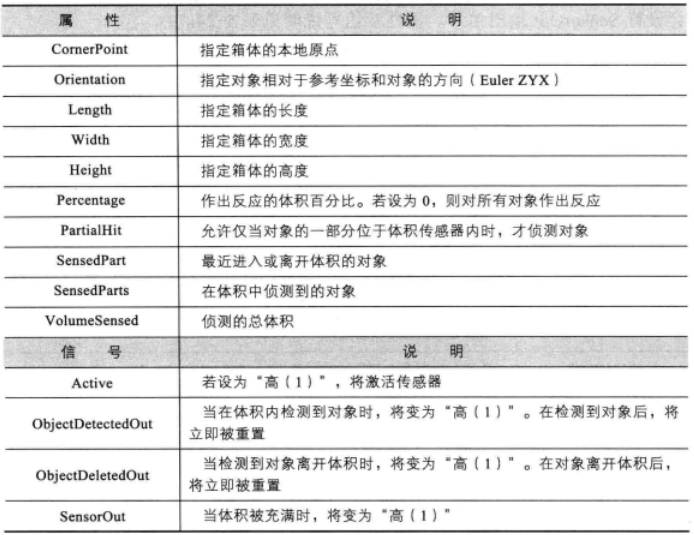
4.VolumeSensor
VolumeSensor检测全部或部分位于箱形体积内的对象。体积用角点、边长、边高、边宽和方位角定义。
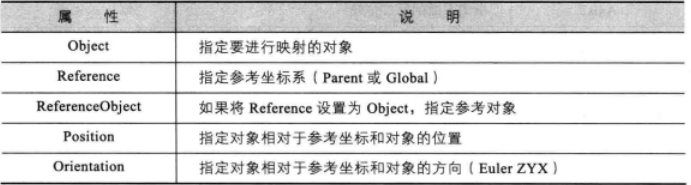
5.PositionSensor
PositionSensor监视对象的位置和方向,对象的位置和方向仅在仿真期间被更新。
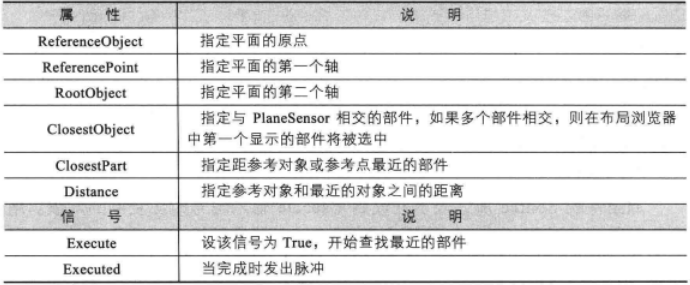
6.ClosestObject
ClosestObject定义了参考对象或参考点。设置Execute信号时,组件会找到ClosestObject、ClosestPart和相对于参考对象或参考点的Distance(如未定义参考对象)。如果定义了 RootObject,则会将搜索的范围限制为该对象和其同源的对象。完成搜索并更新了相关属性时,将设置Executed 信号。
四、“动作”子组件
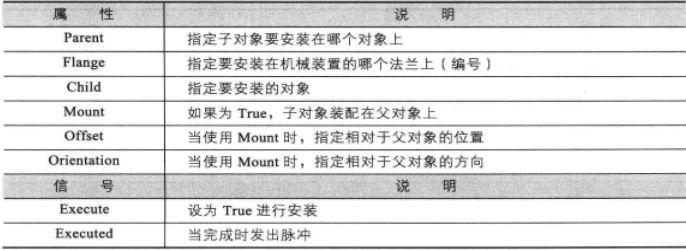
1. Attacher
设置Execute信号时,Attacher将Child安装到Parent上。如果Parent为机械装置,还必须指定要安装的Flange。设置Execute输入信号时,子对 象将安装到父对象上。如果选中Mount,还会使用指定的Offset和Orientation 将子对象装配到父对象上。完成时,将设置Executed输出信号。
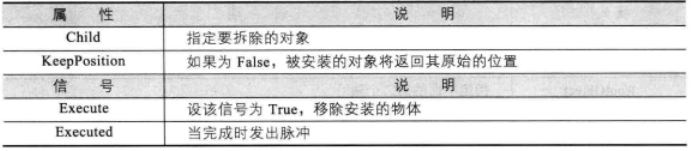
2.Detacher
设置Execute信号时,Detacher会将Child从其所安装的父对象上拆除。 如果选中了 Keep position,
位置将保持不变。否则相对于其父对象放置子对象的位置。完成时,将设置Executed信号。
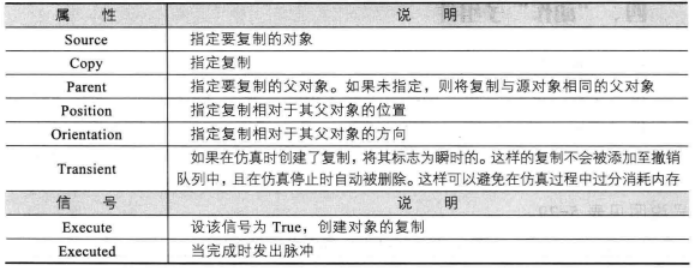
3.Source
源组件的Source属性表示在收到Execute输入信号时应复制的对象。所复制对象的父对象由Parent属性定义,而Copy属性则指定对所复制对象的参 考。输出信号Executed表示复制已完成。
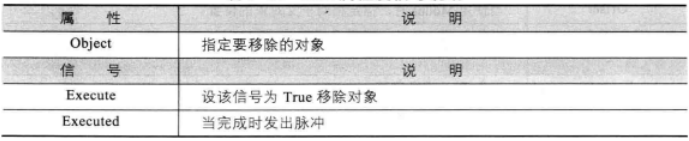
4.Sink
Sink会删除Object属性参考的对象。收到Execute输入信号时开始删除。 删除完成时设置Executed输出信号。
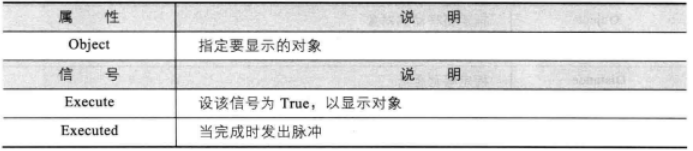
5. Show
设置Execute信号时,将显示Object中参考的对象。完成时,将设置 Executed信号。
6.Hide
设置Execute信号时,将隐藏Object中参考的对象。完成时,将设置 Executed信号。

五、“本体”子组件
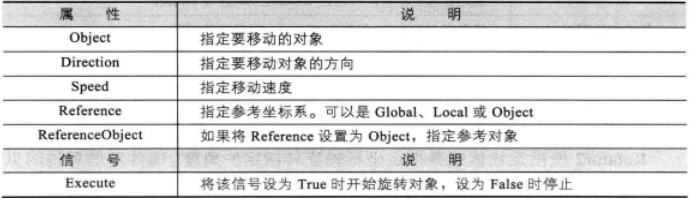
1. LinearMover
LinearMover会按Speed属性指定的速度,沿Direction属性中指定的方向,移动Object属性中参考的对象。设置Execute信号时开始移动,重设Execute 时停止。
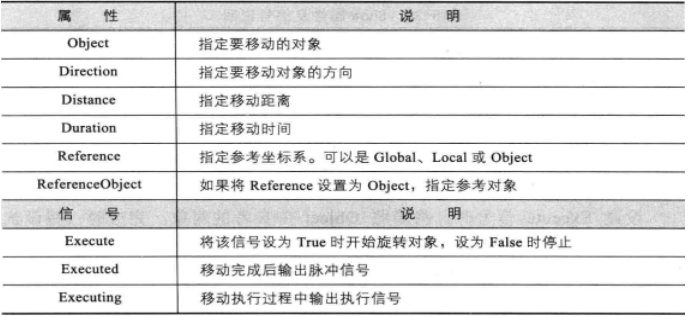
2. LinearMover2
LinearMoved将指定物体移动到指定的位置。
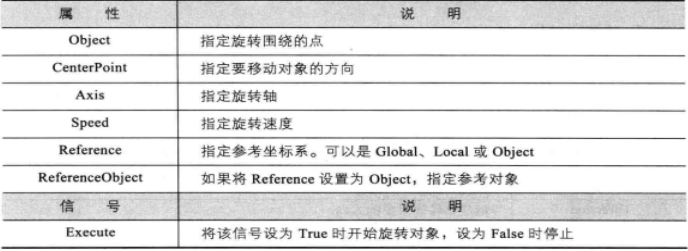
3.Rotator
Rotator会按Speed属性指定的旋转速度旋转Object属性中参考的对象。旋转轴通过CenterPoint和Axis进行定义。设置Execute输入信号时开始运动, 重设Execute时停止运动。
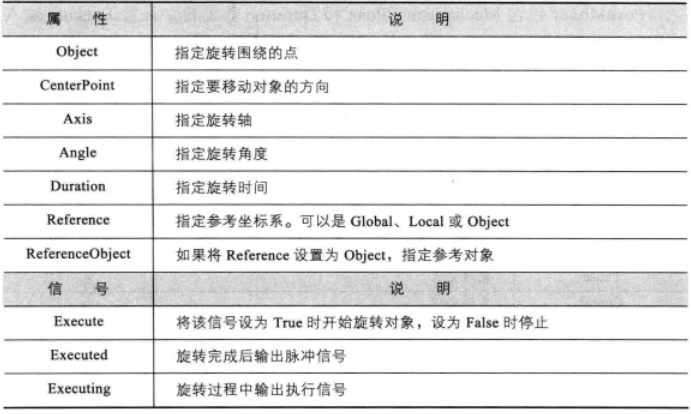
4.Rotator2
Rotator2使指定物体绕着指定坐标轴旋转指定的角度。
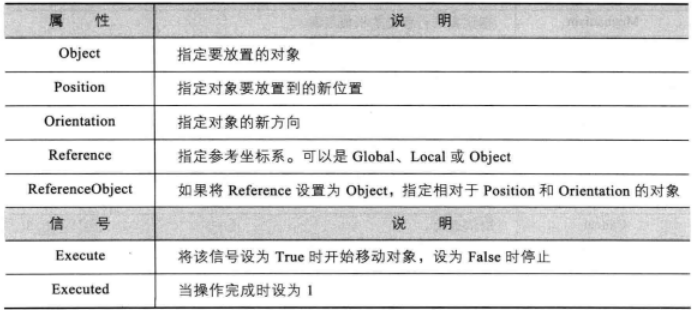
5.Positioner
Positioner具有对象、位置和方向属性。设置Execute信号时,开始将对象向相对于Reference的给定位置移动。完成时设置Executed输出信号。
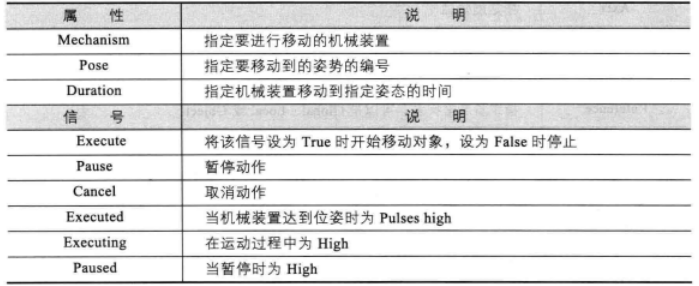
6.PoseMover
PoseMover 包含 Mechanism、Pose 和 Duration 等属性。设置 Execute 输入信号时,机械装置的关节值移向给定姿态。达到给定姿态时,设置Executed 输出信号。
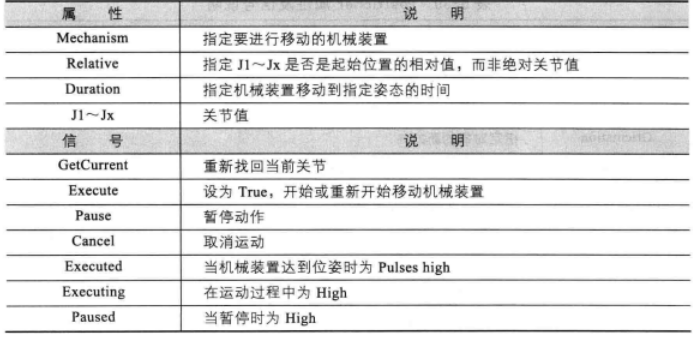
7.ointMover
JointMover包含机械装置、关节值和执行时间等属性。当设置Execute信号时,机械装置的关节向给定的位姿移动。当达到位姿时,使Executed输出信号。使用GetCurrent信号可以重新找回机械装置当前的关节值。
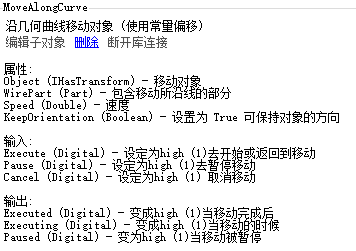
8.MoveAlongCurve
LinearMover2会按Speed属性指定的速度,沿Direction属性中指定的方向,移动Object属性中参考的对象。设置Execute信号时开始移动,重设Execute时停止。
六、“其他”子组件
1. GetParent
GetParent返回输入对象的父对象。找到父对象时,将触发"已执行信号。

2. GraphicSwitch
通过单击图形中的可见部件或设置重置输入信号在两个部件之间转换。

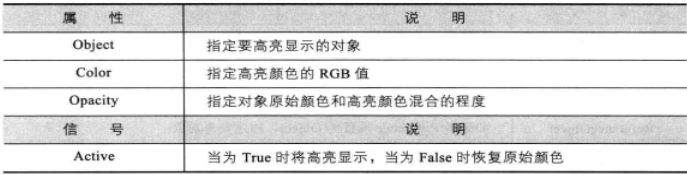
3. Highlighter
临时将所选对象显示为定义了 RGB值的高亮色彩。高亮色彩混合了对象的原始色彩,通过Opacity进行定义。当信号Active被重设,对象恢复原始颜色。
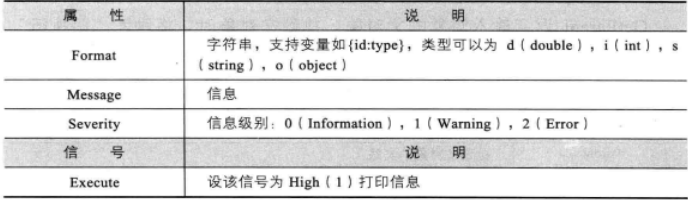
4.Logger
打印输出窗口的信息。
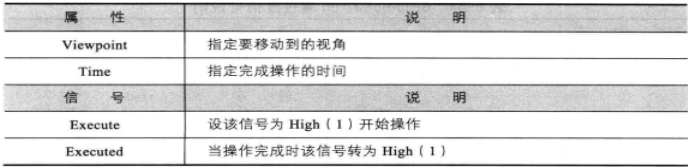
5.MoveToViewPoint
当设置输入信号Execute时,在指定时间内移动到选中的视角。当操作完成时,设置输出信号Executed。
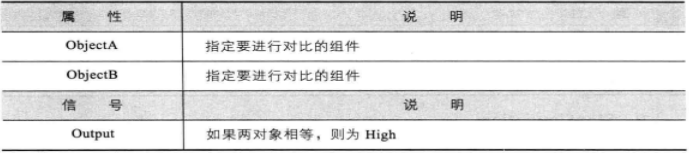
6.ObjectComparer
比较ObjectA是否与ObjectB相同。
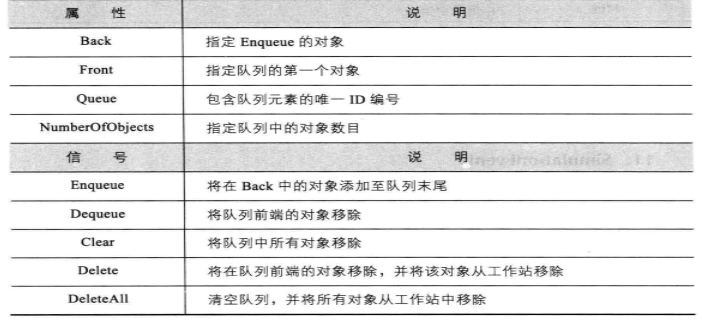
7.Queue
表示FIFO ( first in, first out )队列。当信号Enqueue被设置时,在Back中的对象将被添加到队列中。队列前端对象将显示在Front中。当设置 Dequeue信号时,Front对象将从队列中移除。如果队列中有多个对象,下一个对象将显示在前端。当设置Clear信号时,队列中所有对象将被删除。如果Transformer组件以Queue组件作为对象,该组件将转换Queue组件中的内容而非Queue组件本身。
8.SoundPlayer
当输入信号被设置时,播放使用SoundAsset指定的声音文件,必须为.wav 文件。

9.StopSimulation
当设置了输入信号Execute时,停止仿真。

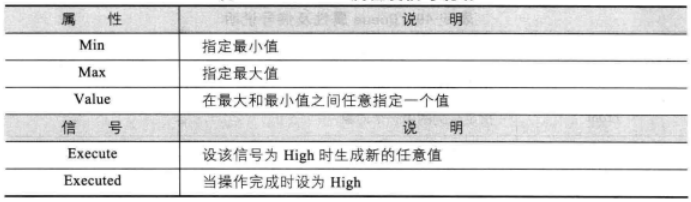
10.Random
当Execute被触发时,生成最大最小值间的任意值。
11.SimulationEvents
在仿真开始和停止时,发出脉冲信号。

从书本上剪切出来,方便个人使用!!
ABB-robotstudio离线编程-Smart组件资料-笔记的更多相关文章
- ROS连接ABB机械臂调试详细教程-ROS(indigo)和ABB RobotStudio 6.03.02-
在ROS industrial介绍中,给出了ROS和常用机械臂的连接方式.具体信息可以参考:http://wiki.ros.org/Industrial ROS连接ABB机械臂调试详细教程-ROS(i ...
- 《Java并发编程实战》读书笔记一 -- 简介
<Java并发编程实战>读书笔记一 -- 简介 并发的历史 并发的历史,也是人类利用有限的资源去提高生产效率的一个的例子. 设想现在有台计算机,这台计算机具有以下的资源: 单核CPU一个 ...
- 《Unix编程艺术》读书笔记(1)
<Unix编程艺术>读书笔记(1) 这两天開始阅读该书,以下是自己的体会,以及原文的摘录,尽管有些东西还无法全然吃透. 写优雅的代码来提高软件系统的透明性:(P134) Elegance ...
- 离线版centos8安装docker笔记
嗨嗨哈哈,已经很久没有坐下来胡编乱造一点笔记了,平时云服务器搞惯了,一个命令就安装好了docker了的,但这次生不逢时的新机房就没那么幸运了,有多不逢时超乎想象,不仅仅服务器没有外网,就连周围方圆一公 ...
- 《Java编程思想》读书笔记(二)
三年之前就买了<Java编程思想>这本书,但是到现在为止都还没有好好看过这本书,这次希望能够坚持通读完整本书并整理好自己的读书笔记,上一篇文章是记录的第一章到第十章的内容,这一次记录的是第 ...
- 《Java编程思想》读书笔记(四)
前言:三年之前就买了<Java编程思想>这本书,但是到现在为止都还没有好好看过这本书,这次希望能够坚持通读完整本书并整理好自己的读书笔记,上一篇文章是记录的第十七章到第十八章的内容,这一次 ...
- 《Linux/Unix系统编程手册》读书笔记 目录
<Linux/Unix系统编程手册>读书笔记1 (创建于4月3日,最后更新4月7日) <Linux/Unix系统编程手册>读书笔记2 (创建于4月9日,最后更新4月10日) ...
- 《Linux/Unix系统编程手册》读书笔记9(文件属性)
<Linux/Unix系统编程手册>读书笔记 目录 在Linux里,万物皆文件.所以文件系统在Linux系统占有重要的地位.本文主要介绍的是文件的属性,只是稍微提及一下文件系统,日后如果有 ...
- 《Linux/Unix系统编程手册》读书笔记8 (文件I/O缓冲)
<Linux/Unix系统编程手册>读书笔记 目录 第13章 这章主要将了关于文件I/O的缓冲. 系统I/O调用(即内核)和C语言标准库I/O函数(即stdio函数)在对磁盘进行操作的时候 ...
随机推荐
- Dapper入门教程(一)——Dapper介绍
Dapper是什么? Dpper是一款.Net平台简单(Simple)的对象映射库,并且Dapper拥有着"微型ORM之王"的称号.就速度而言与手写ADO.NET SqlDateR ...
- 个人php开发之工具--sublime主题配置(二)
摘要:俗话说:工欲善其事,必先利其器.作为一名开发者来说,熟练的使用工具可以达到事半功倍的效果,我就我自己使用的工具说自己的看法.当然,每个人对某个软件都有自己的看法或使用经验,还是那句老话,什么是最 ...
- 推荐——基于python
资料来源: <集体智慧编程>&网络 一.推荐系统 概述 定义 维基百科定义: 推荐系统属于资讯过滤的一种应用. 推荐系统能够将可能受喜好的资讯或实物(例如:电影.电视节目.音乐.书 ...
- 《利用python进行数据分析》NumPy基础:数组和矢量计算 学习笔记
一.有关NumPy (一)官方解释 NumPy is the fundamental package for scientific computing with Python. It contains ...
- U3D操作游戏对象
游戏对象:所有出现在场景中的实体都是游戏对象. 一.创建游戏对象 创建游戏对象有两种方式:一是通过在unity中创建模型,而是通过脚本动态创建游戏对象.通过脚本动态创建的灵活性较高,重点也在于通过脚本 ...
- js 科学计数法 转换为 数字字符 突破幂数正数21位,负数7位的自动转换限制
前天工作中要转换后台返回的一个数据,返回是的科学计算的数字字符,用网上能搜索到的常用两种方法转换会有倍数的限制,然后又搜索了很久,还是没有找到好的方法,虽然也有一些自己写的方法,可还是不能像下面两种方 ...
- decimal扩展方法(转换为字符串,去掉末尾的0)
/// <summary> /// 转换为字符串,去掉末尾0 /// </summary> /// <param name="target">被 ...
- Java温故而知新-插入排序
插入排序 插入排序的基本思想是将待排序的元素依次插入序列合适的位置,然后将这个位置后面的元素依次向后移动一位 位置1 2 3 4 5 6 序列5 4 2 1 8 3 设第1位为最初始的基础元素,也就是 ...
- javascript基础进阶——执行环境及作用域链
概念 执行环境 执行环境定义了变量或函数有权访问的其他函数,决定了他们各自的行为.每个执行环境都有一个与之关联的变量对象. 变量对象 环境中定义的所有变量和函数都保存在这个对象中. 全局执行环境 全局 ...
- 解决tomcat的安装文件中点击startup.bat闪退的问题
遇到这样的问题的时候不要慌,可以使用下面的方式去解决! 如果不用Myeclipse部署Tomcat,使用Tomcat中bin文件加下的startup.bat启动服务会出现闪退的情况,其原因是没有为To ...