MoveIt运动规划-1
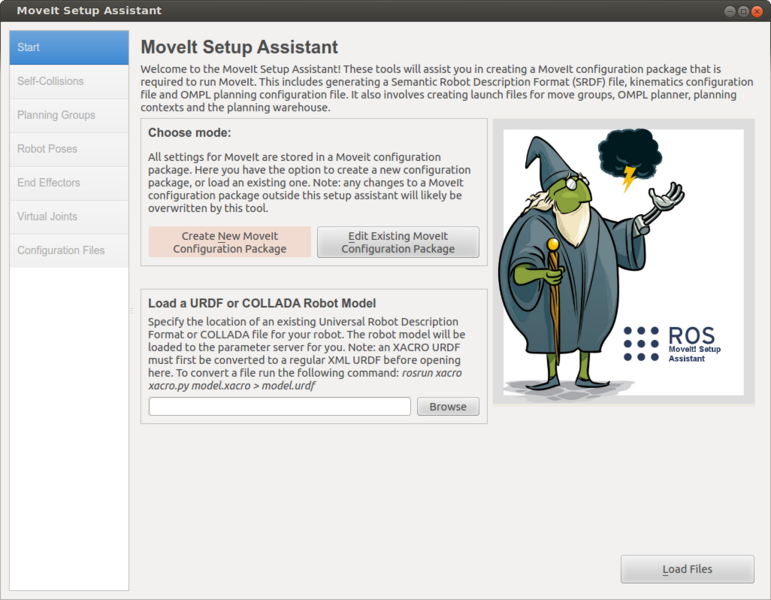
按照帮助文档Setup Assistant Tutorial中的描述,用moveit_setup_assistant图形界面一步步配置机器人,最后生成机器人的配置文件保存到指定的文件夹中。
以UR5机器人为例,将生成的配置文件保存在ur5_moveit_config文件夹中。生成的config文件夹中包含了一些机器人和求解器相关的配置文件,launch文件夹中的demo.launch主要作用是对所创建的MoveIt功能包进行基本测试。
在该路径下运行demo.launch文件: ~/Desktop/ur5_moveit_config/launch$ roslaunch demo.launch
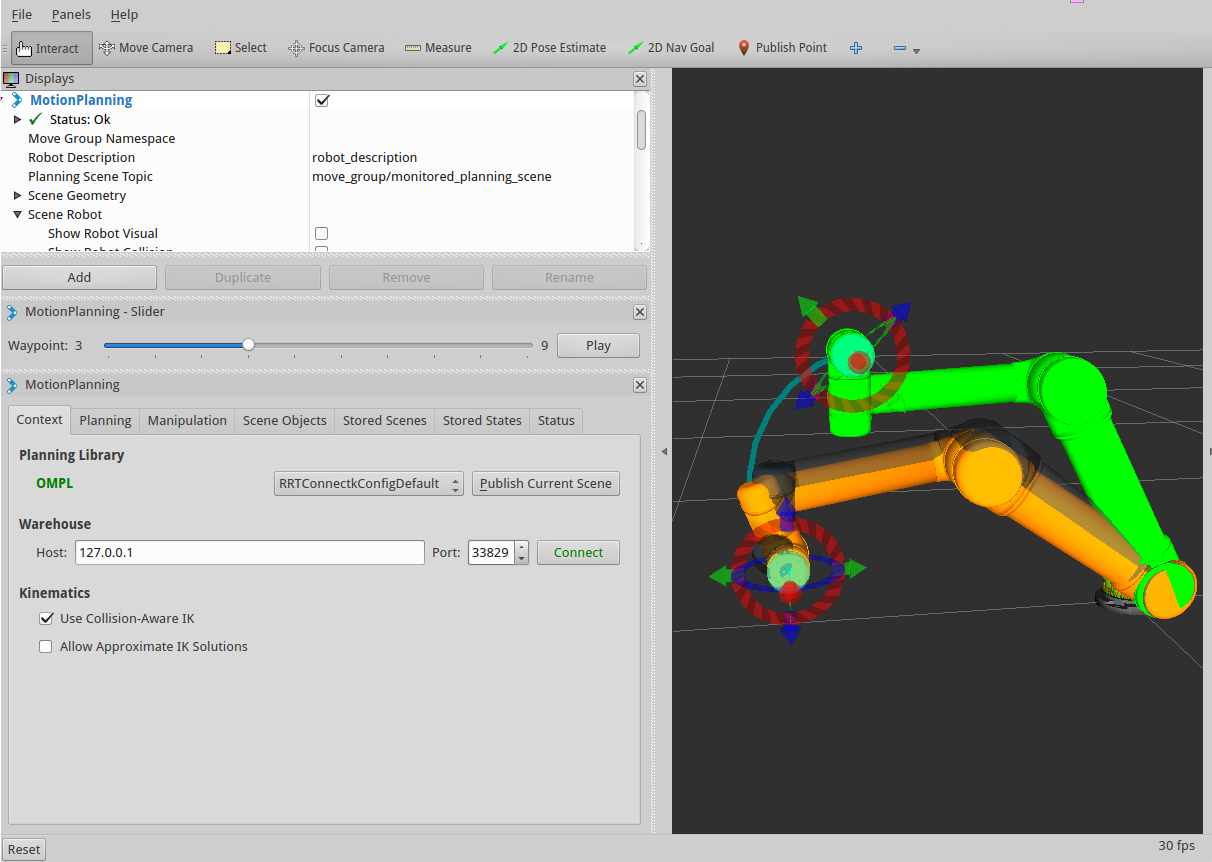
rivz左下角是运动规划MotionPlanning模块,右边的窗口中可以拖动控制球,来移动或旋转机器人的末端。其中绿色的机器人表示运动规划的起始姿态,橙色机器人表示运动规划的目标姿态。
当调整初始或目标姿态后在Planning选项卡的Query框中电机Update按钮进行更新,否则还是会按照之前的姿态进行规划。
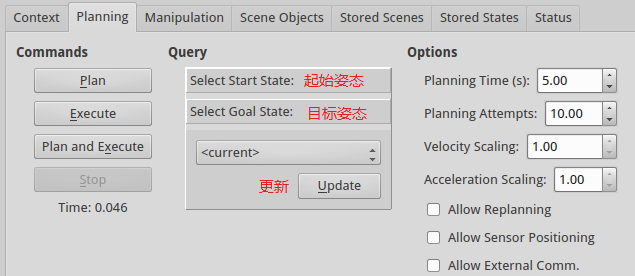
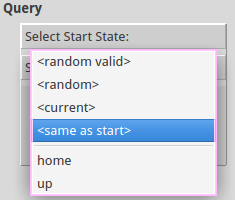
注意Start State和Goal State默认为当前设定的姿态<current>,如果要改为其它特定姿态可以从下拉框中选择,比如随机选择一个姿态<random>或者与初始姿态一致<same as start>。注意下面还有home和up两个姿态,home为初始的零位姿态,up为之前在MoveIt Setup Assistant选项栏Robot Pose中预定义的姿态。
路径规划前要选择好合适的算法,在Context选项栏OMPL路径规划库中选择“RRTConnectkConfigDefault”算法:
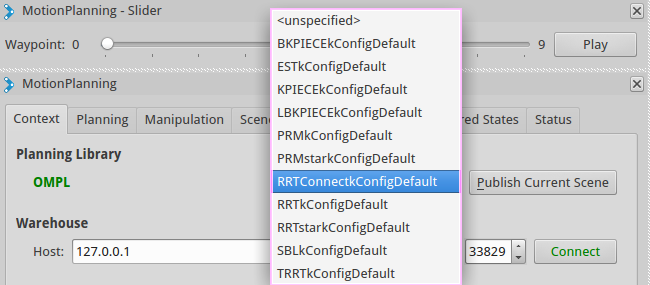
点击Planning选项栏中的Plan按钮进行路径规划,点击Execute按钮则会把机器人移动到目标位置处。在Panels菜单栏中打开MotionPlanning-Slider,会出现一个滑动条(默认不显示),拖动滑条可以显示机器人按规划路径运动的过程。

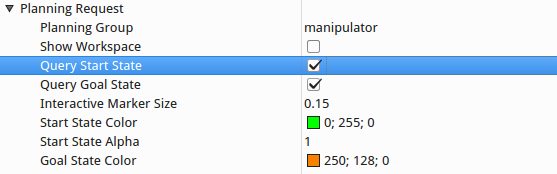
如果要显示末端点的运动轨迹等信息可以在Display→Planned Path中设置Show Trail。另外注意,在Display→Planning Request中勾选Query Start State和Query Goal State后,右边的窗口中才会显示机器人的初始和目标状态,默认不显示初始姿态。初始和目标状态的颜色可以在Start State Color和Goal State Color中改变。
参考:
运动规划 (Motion Planning): MoveIt! 与 OMPL
Mastering ROS for Robotics Programming (2015)-Chapter 11. ROS for Industrial Robots
MoveIt运动规划-1的更多相关文章
- 运动规划 (Motion Planning): MoveIt! 与 OMPL
原创博文:转载请标明出处:http://www.cnblogs.com/zxouxuewei 最近有不少人询问有关MoveIt!与OMPL相关的话题,但是大部分问题都集中于XXX功能怎么实现,XXX错 ...
- 如何用MoveIt快速搭建机器人运动规划平台?
MoveIt = RobotGo,翻译成中文就是“机器人,走你!”所以,MoveIt的主要就是一款致力于让机器人能够自主运动及其相关技术的软件,它的所有模块都是围绕着运动规划的实现而设计的. 两个月前 ...
- 运动规划 (Motion Planning): MoveIt! 与 OMPL---44
原创博文:转载请标明出处:http://www.cnblogs.com/zxouxuewei 最近有不少人询问有关MoveIt!与OMPL相关的话题,但是大部分问题都集中于XXX功能怎么实现,XXX错 ...
- 【2018.04.19 ROS机器人操作系统】机器人控制:运动规划、路径规划及轨迹规划简介之一
参考资料及致谢 本文的绝大部分内容转载自以下几篇文章,首先向原作者致谢,希望自己能在这些前辈们的基础上能有所总结提升. 1. 运动规划/路径规划/轨迹规划的联系与区别 https://blog.csd ...
- 机器人运动规划中的构形空间(Configuration Space)
A key concept in motion planning is configuration space, or C-space for short. Every point in the C- ...
- Grassfire算法- 运动规划(Motion planning)
Grassfire算法: 一.概念 这个算法是做图像处理的抽骨架处理,目的是求出图像的骨架,可以想象一片与物体形状相同的草,沿其外围各点同时点火.当火势向内蔓延,向前推进的火线相遇处各点的轨迹就是中 ...
- 第三期 第三期 搜索——1.运动规划(motion_planing)
运动规划的根本问题在于机器人可能存在于一个这样的世界中, 它可能想找到一条到达这个目标的路径,那么就需要指定一个到达那里的计划, 自动驾驶汽车也会遇到这个问题.他可能处于高速公路的附近的街道网络中,他 ...
- 自动驾驶运动规划-Reeds Shepp曲线
自动驾驶运动规划-Reeds Shepp曲线 相比于Dubins Car只允许车辆向前运动,Reeds Shepp Car既允许车辆向前运动,也允许车辆向后运动. Reeds Shepp Car运动规 ...
- 运动规划——PT and PVT 模式
最近项目成员在做机器人上层开发时,经常说到PT模式和PVT模式.一直没搞懂这两种模式的实际差别.上网检索进行学习...... ref link:https://blog.csdn.net/m0_376 ...
随机推荐
- [转]MySQL主从复制(Master-Slave)与读写分离(MySQL-Proxy)实践
转自:http://heylinux.com/archives/1004.html Mysql作为目前世界上使用最广泛的免费数据库,相信所有从事系统运维的工程师都一定接触过.但在实际的生产环境中,由单 ...
- golang的日志系统log和glog
go语言有一个标准库,log,提供了最基本的日志功能,但是没有什么高级的功能,如果需要高级的特性,可以选择glog或log4go. 参考:https://cloud.tencent.com/devel ...
- 洛谷 p1352 没有上司的舞会 题解
P1352 没有上司的舞会 题目描述 某大学有N个职员,编号为1~N.他们之间有从属关系,也就是说他们的关系就像一棵以校长为根的树,父结点就是子结点的直接上司.现在有个周年庆宴会,宴会每邀请来一个职员 ...
- 用网站(WebSite而不是WebProject)项目构建ASP.NET MVC网站
从ASP.NET MVC第一个版本开始到现在,创建ASP.NET MVC项目的官方方法只有一个,“文件”->“新建”->“项目”,然后选择ASP.NET MVC X Web应用程序. 这种 ...
- PowerDesigner设置表字段唯一约束
现有一个表student,id为主键. 现打算给name添加一个唯一约束. 双击打开这个表,点击“keys"选项卡,显示有一个key_1,这是id主键. 点击”insert a row'插入 ...
- JS实现异步编程的4种方法
一.回调函数 这是异步编程最基本的方法. 假定有两个函数f1和f2,后者等待前者的执行结果. f1(); f2(); //如果f1是一个很耗时的任务,可以考虑改写f1,把f2写成f1的回调函数. fu ...
- 使用Java语言开发微信公众平台(八)——自定义菜单功能
随着上一篇文章的结束,我们已经实现了所有消息的类型的回复功能.今天,我们来学习更加高大上,也更加重要的自定义菜单功能. 一.了解自定义菜单 自定义菜单是微信公众平台最常用也是最重要的功能之一.根据微信 ...
- Android Eclipseproject开发中的常见调试问题(二)android.os.NetworkOnMainThreadException 异常的解决的方法
android.os.NetworkOnMainThreadException 异常的解决的方法. 刚开是把HttpURLConnectionnection 打开连接这种方法放在UI线程里了,可能不是 ...
- Documentation/PCI/pci-iov-howto.txt
Chinese translated version of Documentation/PCI/pci-iov-howto.txt If you have any comment or update ...
- 能够在Linux系统中运行的5款大型耐玩游戏
Linux 可能不会很快成为游戏玩家选择的平台 —— Valve Steam Machines 的失败似乎是对这一点的深刻提醒 —— 但这并不意味着该平台没有稳定增长,并且拥有相当多的优秀游戏. 从独 ...