Cartographer安装
安装过程:
官方安装教程:
https://google-cartographer-ros.readthedocs.io/en/latest/index.html
# Install wstool and rosdep.
sudo apt-get update
sudo apt-get install -y python-wstool python-rosdep ninja-build # Create a new workspace in 'catkin_ws'.
mkdir catkin_ws
cd catkin_ws
wstool init src # Merge the cartographer_ros.rosinstall file and fetch code for dependencies.
wstool merge -t src https://raw.githubusercontent.com/googlecartographer/cartographer_ros/master/cartographer_ros.rosinstall
wstool update -t src
//在这一步可能会显示无法下载cere-solver
/*
解决办法手动下载cere-solver 然后放到src中
下载链接:https://ceres-solver.googlesource.com/ceres-solver.git/+/1.13.0
点击页面中的tgz可以下载,下载后解压到src中
# Install proto3.
src/cartographer/scripts/install_proto3.sh # Install deb dependencies.
# The command 'sudo rosdep init' will print an error if you have already
# executed it since installing ROS. This error can be ignored.
sudo rosdep init
rosdep update
rosdep install --from-paths src --ignore-src --rosdistro=${ROS_DISTRO} -y
//这里要修改ROS_DISTRO为自己的ros版本如kinetic或者indigo
# Build and install.
catkin_make_isolated --install --use-ninja
source install_isolated/setup.bash
下载安装完毕以后,运行数据集。
下载数据集。
# Download the 2D backpack example bag.
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_2d/cartographer_paper_deutsches_museum.bag # Launch the 2D backpack demo.
roslaunch cartographer_ros demo_backpack_2d.launch bag_filename:=${HOME}/Downloads/cartographer_paper_deutsches_museum.bag # Download the 3D backpack example bag.
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_3d/with_intensities/b3-2016-04-05-14-14-00.bag # Launch the 3D backpack demo.
roslaunch cartographer_ros demo_backpack_3d.launch bag_filename:=${HOME}/Downloads/b3-2016-04-05-14-14-00.bag
二维数据集运行
结果如下所示: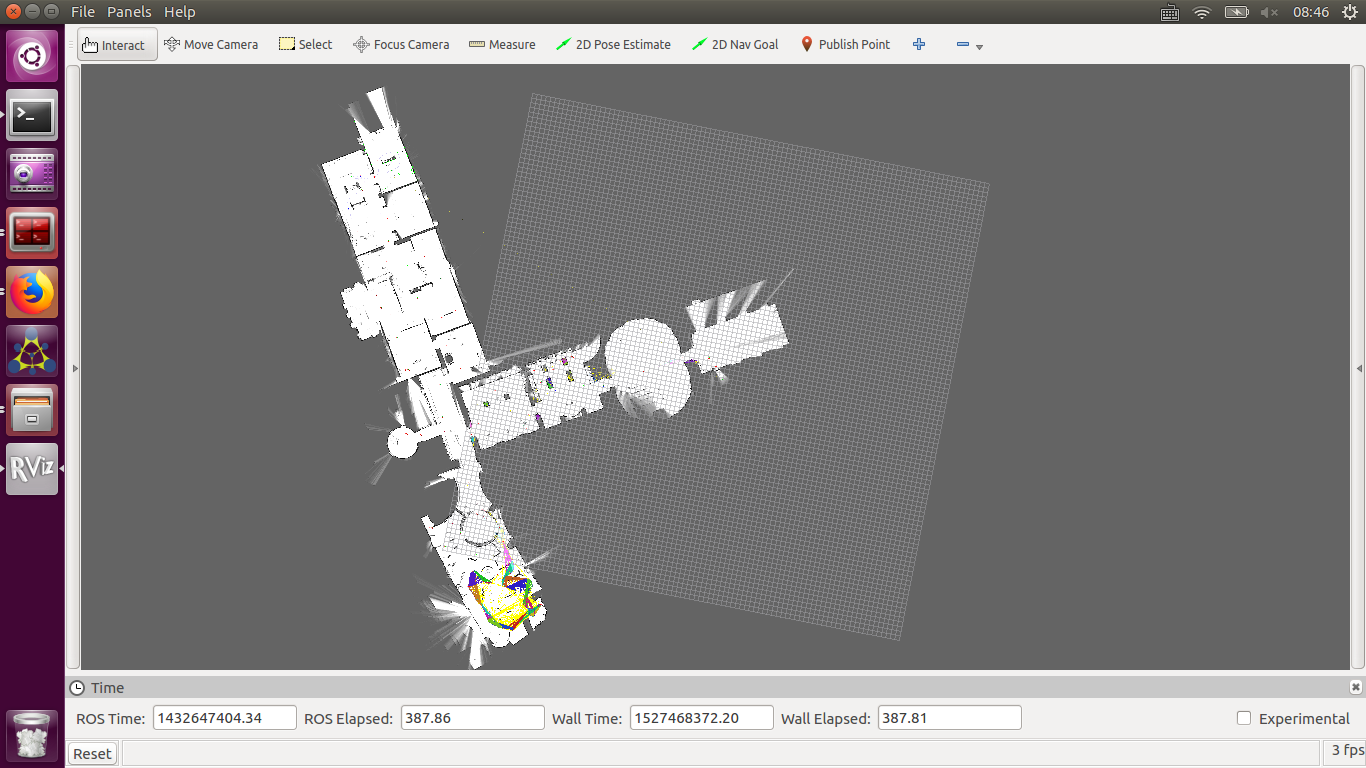
rosbag内容:
//输入命令
rostopic list
//得到数据包内容,并且用rostopic echo /topic_name 来查看各个topic的内容
/clicked_point
/clock
/horizontal_laser_3d//有数据, frame_id: "horizontal_vlp16_link"
/imu//有数据,frame_id: "imu_link"
/initialpose
/map
/map_updates
/move_base/DWAPlannerROS/global_plan
/move_base/global_costmap/costmap
/move_base/global_costmap/costmap_updates
/move_base/global_costmap/footprint
/move_base/local_costmap/costmap
/move_base/local_costmap/costmap_updates
/move_base_simple/goal
/particlecloud
/rosout
/rosout_agg
/scan
/tf
/tf_static
/velodyne_points//没有数据
/vertical_laser_3d//有数据,frame_id: "vertical_vlp16_link"
这里有vertical和horizaontal两个laser_3d,如何理解,还有velodyne_points。
利用rostopic查看各个数据信息:
发现
跑3维度数据集效果:

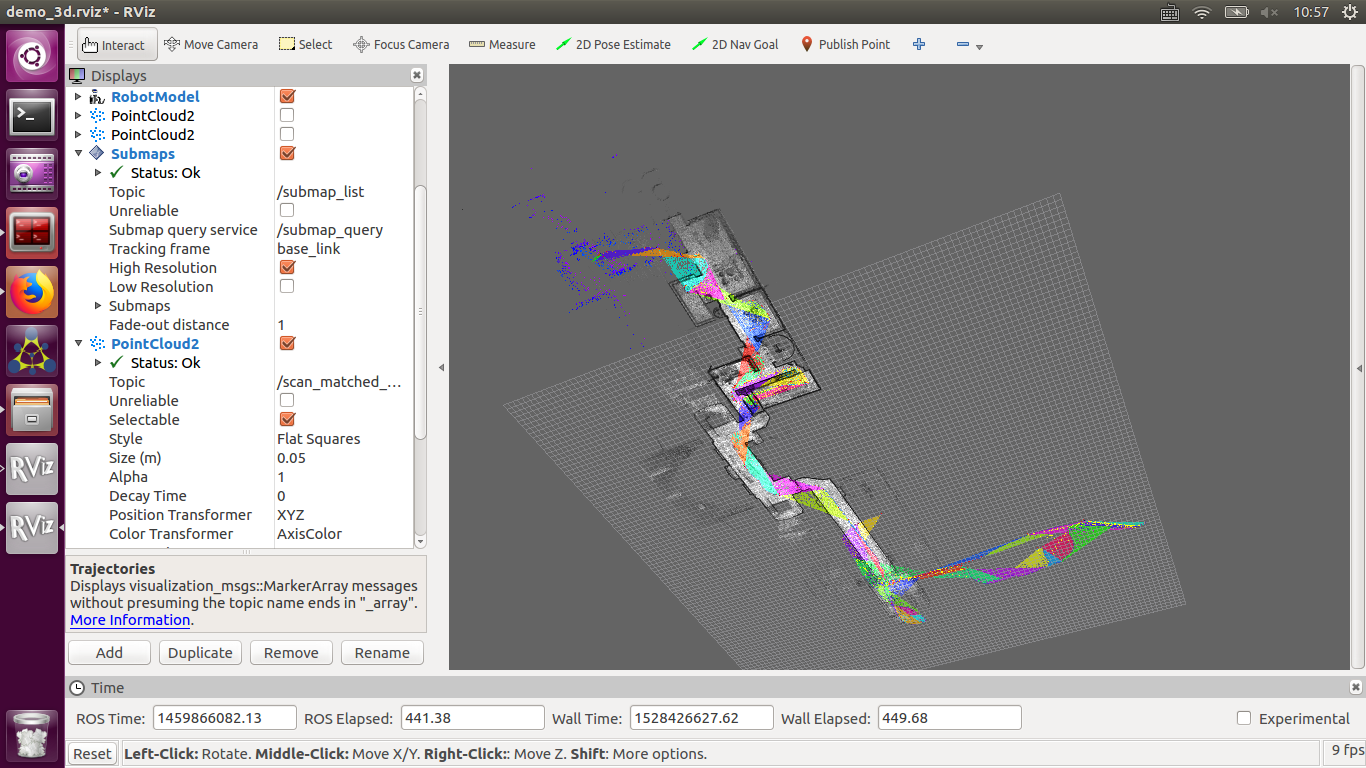
在跑3维数据集的时候,查看rostopic
rostopic list
/clicked_point
/clock
/constraint_list
/horizontal_laser_3d
/imu
/initialpose
/joint_states
/landmark_poses_list
/map
/move_base_simple/goal
/rosout
/rosout_agg
/scan_matched_points2
/submap_list
/tf
/tf_static
/trajectory_node_list
/vertical_laser_3d
用自己的传感器跑cartographer
由于传感器的rostopic不同,我们需要对cartographer订阅的名称进行修改,需要在launch文件中进行修改,但是修改后发现没有任何作用,这是因为修改后需要重新按照上面的流程进行编译安装,这个可能是因为在安装的时候其实已经把launch文件安装到系统中了,所以我们调用的时候还是调用系统中的launch文件
但是按照网络上的修改版本后可以直接修改,不用走以上的流程
修改好名称接入以后出现问题
Queue(0,imu)exceeds maximum size.
Queue(0,points2_1) exceeds maximum size.
Cartographer安装的更多相关文章
- cartographer 安装
Debian 8 Jessie 一顿操作梦如虎,最后不知道咋装上的. 参考:https://www.jianshu.com/p/9922a51ce38f https://blog.csdn.net/p ...
- cartographer 安装问题
安装主要参考hitcm教程: http://www.cnblogs.com/hitcm/p/5939507.html 这里只说安装过程中遇到的问题, ceres-solver 与 eigen3 版本不 ...
- cartographer安装--Ubuntu14.04--indigo
0.安装所有依赖项 sudo apt-get install -y google-mock libboost-all-dev libeigen3-dev libgflags-dev libgoogl ...
- cartographer 安装修改
装置:VLP16+IMU+单板机 目的:利用传感器数据,实现real time 的建模 结果:失败,但之前的步骤都正常,出问题的地方可能是imu出错. 稍后附上 launch文件,lua文件,urdf ...
- 谷歌Cartographer学习(1)-快速安装测试
谷歌自己提供了安装方法,但是安装比较繁琐,我做了一定的修改,代码放到个人github上,https://github.com/hitcm/. ros下面的安装非常快捷,只需要catkin_make即可 ...
- 谷歌Cartographer学习(1)-快速安装测试(转载)
转载自谷歌Cartographer学习(1)-快速安装测试 代码放到个人github上,https://github.com/hitcm/ 如下,需要安装3个软件包,ceres solver.cart ...
- cartographer 最新版安装测试
在官网的基础上稍加修改,但保证代码都是最新的 我的系统配置: Debian9 strech, ROS lunar 该方法对 ubuntu 系列操作系统以及其他ROS版本同样适用. 1. 安装依赖库 ...
- Ubuntu 14.04 indigo 安装 cartographer 1.0.0
安装依赖(cmake 版本为2.8,我的是自带的)sudo apt-get updatesudo apt-get install -y g++ git google-mock libboost-all ...
- 安装cartographer
# Build and install Cartographer. git clone https://github.com/hitcm/cartographer.git cd cartographe ...
随机推荐
- js 实现异步上传图片+预览
两种js实现方式,一种用原生的ajax:另一种用JQuery,例子比较简单,直接上代码. <!DOCTYPE html> <html> <head> <tit ...
- 我的第一个Angular2应用
1需要具备的基本前端基础:HTML.CSS.JavaScript.为了实现对项目包的管理,推荐使用npm NPM是随同NodeJS一起安装的包管理工具,能解决NodeJS代码部署上的很多问题:官网先下 ...
- XenServer 自动化布署 (关键词: PXE ANSWER SCRIPT)
XenServer 6.x PXE自动化布署: 测试环境:win10 + Tiny pxe server 1.0.2,采用gpxelinux.0 时间:2017.1.10 PXE远程安装: 1)def ...
- 单链表ADT
本博客第一篇学术性博客,所以还是写点什么东西: 首先这篇博客以及以后的博客中的代码尽量百分之90是自己写过的: 可能有部分图片和代码是我认为别人更好的故摘抄下来, 本人三观正确,所以一定会表明来源: ...
- 高通 MSM8K bootloader之一: SBL1
MSM8K Boot Flow 转自:http://www.cnblogs.com/liang123/p/6325257.html http://blog.csdn.net/F ...
- 单链表数据结构 - java简单实现
链表中最简单的一种是单向链表,每个元素包含两个域,值域和指针域,我们把这样的元素称之为节点.每个节点的指针域内有一个指针,指向下一个节点,而最后一个节点则指向一个空值.如图就是一个单向链表 一个单向链 ...
- Python之file方法
def fileno(self): # 文件描述符 def flush(self): # 刷新文件内部缓冲区 def isatty(se ...
- Tensorflow实战系列之四:
这个是第四篇,打算写一些语义分割的内容实战.
- 获取百度地图POI数据二(准备搜索关键词)
上篇讲到 想要获取尽可能多的POI数据 需要准备尽可能多的搜索关键字 那么这些关键字如何得来呢? 本人使用的方法是通过一些网站来获取这些关键词 http://poi.mapbar.com ...
- Jsの练习-数组其他常用方法 -map() ,filter() ,every() ,some()
map() :映射,对数组中的每一项运行给定函数,返回每次函数调用结果组成的函数. <!DOCTYPE html> <html lang="en"> < ...