自动旋转ROS小车(rviz+urdf+xacro)(附加python操作键盘控制小车运动)
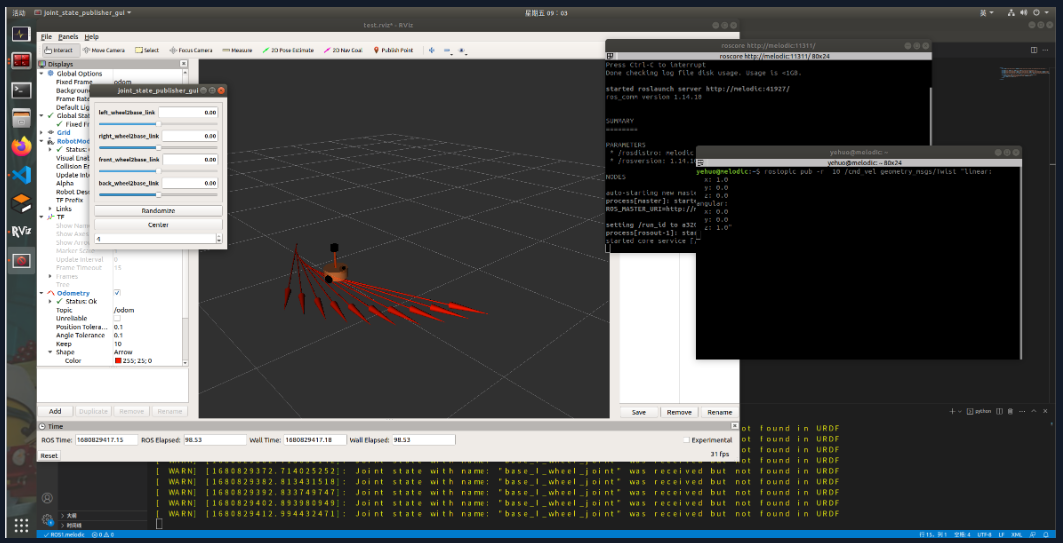
成果图



STEP1 创建工作空间
mkdir -p car_ws/src
cd car_ws
catkin_make
STEP2 在vscode中准备需要的文件夹
右键src,点击Create Catkin Package

再跳出的输入框中:
先输入包名:car
再输入依赖工具:urdf xacro
在car目录下依次创建 config、launch、meshes、urdf文件夹
在 car/urdf 文件夹下再创建 urdf、xacro文件夹
结构如下图所示
STEP3 car/urdf/urdf
创建 test.urdf 文件
car/urdf/urdf/test.urdf
<robot name="mycar">
<!-- set base_footprint -->
<link name="base_footprint">
<visual>
<geometry>
<sphere radius="0.001" />
</geometry>
</visual>
</link>
<!-- add base -->
<link name="base_link">
<visual>
<geometry>
<cylinder radius="0.1" length="0.08" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="baselink_color">
<color rgba="1.0 0.5 0.2 0.8" />
</material>
</visual>
</link>
<joint name="link2footprint" type="fixed">
<parent link="base_footprint" />
<child link="base_link"/>
<origin xyz="0 0 0.055" rpy= "0 0 0"/>
</joint>
<!-- add qudong wheel -->
<link name="left_wheel">
<visual>
<geometry>
<cylinder radius="0.0325" length="0.015" />
</geometry>
<origin xyz="0 0 0" rpy="1.5708 0 0" />
<material name="black">
<color rgba="0.0 0.0 0.0 1.0" />
</material>
</visual>
</link>
<joint name="left2link" type="continuous">
<parent link="base_link" />
<child link="left_wheel" />
<origin xyz="0 0.1 -0.0225" rpy="0 0 0" />
<axis xyz="0 1 0" />
</joint>
<link name="right_wheel">
<visual>
<geometry>
<cylinder radius="0.0325" length="0.015" />
</geometry>
<origin xyz="0 0 0" rpy="1.5708 0 0" />
<material name="black">
<color rgba="0.0 0.0 0.0 1.0" />
</material>
</visual>
</link>
<joint name="right2link" type="continuous">
<parent link="base_link" />
<child link="right_wheel" />
<origin xyz="0 -0.1 -0.0225" rpy="0 0 0" />
<axis xyz="0 1 0" />
</joint>
<!-- add wanxiang wheel -->
<link name="front_wheel">
<visual>
<geometry>
<sphere radius="0.0075" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="wheel_color">
<color rgba="0.0 0.0 0.0 1.0" />
</material>
</visual>
</link>
<joint name="front2link" type="continuous">
<parent link="base_link" />
<child link="front_wheel" />
<origin xyz="0.08 0 -0.0475" />
<axis xyz="0 1 0" />
</joint>
<link name="back_wheel">
<visual>
<geometry>
<sphere radius="0.0075" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="wheel_color">
<color rgba="0.0 0.0 0.0 1.0" />
</material>
</visual>
</link>
<joint name="back2link" type="continuous">
<parent link="base_link" />
<child link="back_wheel" />
<origin xyz="-0.08 0 -0.0475" />
<axis xyz="0 1 0" />
</joint>
</robot>
STEP4 car/urdf/xacro
创建 car.urdf.xacro
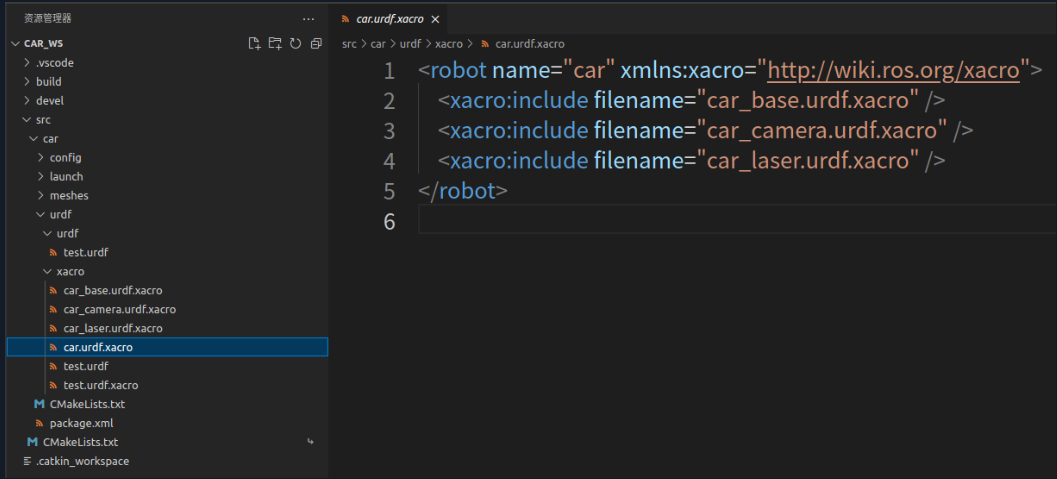
car/urdf/xacro/car.urdf.xacro
<robot name="car" xmlns:xacro="http://wiki.ros.org/xacro">
<xacro:include filename="car_base.urdf.xacro" />
<xacro:include filename="car_camera.urdf.xacro" />
<xacro:include filename="car_laser.urdf.xacro" />
</robot>
STEP5 car/launch
创建 control.launch

car/launch/control.launch
<launch>
<param name="robot_description" command="$(find xacro)/xacro $(find car)/urdf/xacro/car.urdf.xacro" />
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find car)/config/test.rviz" />
<node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" output="screen" />
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" output="screen" />
<node pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" name="joint_state_publisher_gui" output="screen" />
<node name="arbotix" pkg="arbotix_python" type="arbotix_driver" output="screen">
<rosparam file="$(find car)/config/control.yaml" command="load" />
<param name="sim" value="true" />
</node>
</launch>
STEP6 car/config
依次创建 control.yaml test.rviz

car/config/control.yaml
controllers: {
base_controller: {
type: diff_controller,
base_frame_id: base_footprint,
base_width: 0.2,
ticks_meter: 2000,
Kp: 12,
Kd: 12,
Ki: 0,
Ko: 50,
accel_limit: 1.0
}
}
car/config/test.rviz
可以先在 rviz 中运行代码,然后 将模型保存到 car/config 路径下,取名为 test.rviz
Panels:
- Class: rviz/Displays
Help Height: 78
Name: Displays
Property Tree Widget:
Expanded:
- /Global Options1
- /Status1
- /RobotModel1
- /TF1
- /Odometry1
- /Odometry1/Shape1
Splitter Ratio: 0.5
Tree Height: 670
- Class: rviz/Selection
Name: Selection
- Class: rviz/Tool Properties
Expanded:
- /2D Pose Estimate1
- /2D Nav Goal1
- /Publish Point1
Name: Tool Properties
Splitter Ratio: 0.5886790156364441
- Class: rviz/Views
Expanded:
- /Current View1
Name: Views
Splitter Ratio: 0.5
- Class: rviz/Time
Experimental: false
Name: Time
SyncMode: 0
SyncSource: ""
Preferences:
PromptSaveOnExit: true
Toolbars:
toolButtonStyle: 2
Visualization Manager:
Class: ""
Displays:
- Alpha: 0.5
Cell Size: 1
Class: rviz/Grid
Color: 160; 160; 164
Enabled: true
Line Style:
Line Width: 0.029999999329447746
Value: Lines
Name: Grid
Normal Cell Count: 0
Offset:
X: 0
Y: 0
Z: 0
Plane: XY
Plane Cell Count: 10
Reference Frame: <Fixed Frame>
Value: true
- Alpha: 1
Class: rviz/RobotModel
Collision Enabled: false
Enabled: true
Links:
All Links Enabled: true
Expand Joint Details: false
Expand Link Details: false
Expand Tree: false
Link Tree Style: Links in Alphabetic Order
back_wheel:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
base_footprint:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
base_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
camera:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
front_wheel:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
laser:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
left_wheel:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
right_wheel:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
support:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
Name: RobotModel
Robot Description: robot_description
TF Prefix: ""
Update Interval: 0
Value: true
Visual Enabled: true
- Class: rviz/TF
Enabled: false
Frame Timeout: 15
Frames:
All Enabled: true
Marker Scale: 1
Name: TF
Show Arrows: true
Show Axes: true
Show Names: true
Tree:
{}
Update Interval: 0
Value: false
- Angle Tolerance: 0.10000000149011612
Class: rviz/Odometry
Covariance:
Orientation:
Alpha: 0.5
Color: 255; 255; 127
Color Style: Unique
Frame: Local
Offset: 1
Scale: 1
Value: true
Position:
Alpha: 0.30000001192092896
Color: 204; 51; 204
Scale: 1
Value: true
Value: true
Enabled: true
Keep: 10
Name: Odometry
Position Tolerance: 0.10000000149011612
Shape:
Alpha: 1
Axes Length: 1
Axes Radius: 0.10000000149011612
Color: 255; 25; 0
Head Length: 0.30000001192092896
Head Radius: 0.05000000074505806
Shaft Length: 1
Shaft Radius: 0.009999999776482582
Value: Arrow
Topic: /odom
Unreliable: false
Value: true
Enabled: true
Global Options:
Background Color: 48; 48; 48
Default Light: true
Fixed Frame: odom
Frame Rate: 30
Name: root
Tools:
- Class: rviz/Interact
Hide Inactive Objects: true
- Class: rviz/MoveCamera
- Class: rviz/Select
- Class: rviz/FocusCamera
- Class: rviz/Measure
- Class: rviz/SetInitialPose
Theta std deviation: 0.2617993950843811
Topic: /initialpose
X std deviation: 0.5
Y std deviation: 0.5
- Class: rviz/SetGoal
Topic: /move_base_simple/goal
- Class: rviz/PublishPoint
Single click: true
Topic: /clicked_point
Value: true
Views:
Current:
Class: rviz/Orbit
Distance: 6.243990898132324
Enable Stereo Rendering:
Stereo Eye Separation: 0.05999999865889549
Stereo Focal Distance: 1
Swap Stereo Eyes: false
Value: false
Focal Point:
X: -0.6781591773033142
Y: 0.7335925102233887
Z: -0.1656564623117447
Focal Shape Fixed Size: true
Focal Shape Size: 0.05000000074505806
Invert Z Axis: false
Name: Current View
Near Clip Distance: 0.009999999776482582
Pitch: 0.3703985810279846
Target Frame: <Fixed Frame>
Value: Orbit (rviz)
Yaw: 0.8403980731964111
Saved: ~
Window Geometry:
Displays:
collapsed: false
Height: 967
Hide Left Dock: false
Hide Right Dock: false
QMainWindow State: 000000ff00000000fd00000004000000000000015600000329fc0200000008fb0000001200530065006c0065006300740069006f006e00000001e10000009b0000005c00fffffffb0000001e0054006f006f006c002000500072006f007000650072007400690065007302000001ed000001df00000185000000a3fb000000120056006900650077007300200054006f006f02000001df000002110000018500000122fb000000200054006f006f006c002000500072006f0070006500720074006900650073003203000002880000011d000002210000017afb000000100044006900730070006c006100790073010000003d00000329000000c900fffffffb0000002000730065006c0065006300740069006f006e00200062007500660066006500720200000138000000aa0000023a00000294fb00000014005700690064006500530074006500720065006f02000000e6000000d2000003ee0000030bfb0000000c004b0069006e0065006300740200000186000001060000030c00000261000000010000010f00000329fc0200000003fb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000041000000780000000000000000fb0000000a00560069006500770073010000003d00000329000000a400fffffffb0000001200530065006c0065006300740069006f006e010000025a000000b200000000000000000000000200000490000000a9fc0100000001fb0000000a00560069006500770073030000004e00000080000002e100000197000000030000062d0000003efc0100000002fb0000000800540069006d006501000000000000062d000002eb00fffffffb0000000800540069006d00650100000000000004500000000000000000000003bc0000032900000004000000040000000800000008fc0000000100000002000000010000000a0054006f006f006c00730100000000ffffffff0000000000000000
Selection:
collapsed: false
Time:
collapsed: false
Tool Properties:
collapsed: false
Views:
collapsed: false
Width: 1581
X: 67
Y: 27
STEP7 运行
启动 roscore
建议在vscode外终端启动(也可在vscode中启动)
设置环境变量,启动rviz
在vscode中新建终端
注意要进入 car_ws 路径下
依次执行以下命令

出现如下画面即代表创建成功
第一次创建时可检查一下左栏选项是否一致

第一种启动方式:终端设置线速度、角速度
在vscode外新建终端
输入以下指令
注意 linear中x、angular中z行的修改
修改完成后点击回车即可

出现下图(rviz中的小车开始自动旋转)即代表创建成功

第二种启动方式:
在 car_ws/src 路径下创建一个新的工作空间,取名为 mbot_teleop

在 mbot_teleop 文件夹下依次创建 launch、scripts 文件夹

在launch文件夹下新建 mbot_teleop.launch 文件
car_ws/src/mbot_teleop/launch/mbot_teleop.launch
<launch>
<node name="mbot_teleop" pkg="mbot_teleop" type="mbot_teleop.py" output="screen">
<param name="scale_linear" value="0.1" type="double"/>
<param name="scale_angular" value="0.4" type="double"/>
</node>
</launch>
在scripts文件夹下新建 mbot_teleop.py 文件
car_ws/src/mbot_teleop/scripts/mbot_teleop.py
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import rospy
from geometry_msgs.msg import Twist
import sys, select, termios, tty
msg = """
Control mbot!
---------------------------
Moving around:
u i o
j k l
m , .
q/z : increase/decrease max speeds by 10%
w/x : increase/decrease only linear speed by 10%
e/c : increase/decrease only angular speed by 10%
space key, k : force stop
anything else : stop smoothly
CTRL-C to quit
"""
moveBindings = {
'w':(1,0),
'o':(1,-1),
'a':(0,1),
'd':(0,-1),
'u':(1,1),
's':(-1,0),
'.':(-1,1),
'm':(-1,-1),
}
speedBindings={
'q':(1.1,1.1),
'z':(.9,.9),
'w':(1.1,1),
'x':(.9,1),
'e':(1,1.1),
'c':(1,.9),
}
def getKey():
tty.setraw(sys.stdin.fileno())
rlist, _, _ = select.select([sys.stdin], [], [], 0.1)
if rlist:
key = sys.stdin.read(1)
else:
key = ''
termios.tcsetattr(sys.stdin, termios.TCSADRAIN, settings)
return key
speed = .2
turn = 1
def vels(speed,turn):
return "currently:\tspeed %s\tturn %s " % (speed,turn)
if __name__=="__main__":
settings = termios.tcgetattr(sys.stdin)
rospy.init_node('mbot_teleop')
pub = rospy.Publisher('/cmd_vel', Twist, queue_size=5)
x = 0
th = 0
status = 0
count = 0
acc = 0.1
target_speed = 0
target_turn = 0
control_speed = 0
control_turn = 0
try:
print msg
print vels(speed,turn)
while(1):
key = getKey()
# 运动控制方向键(1:正方向,-1负方向)
if key in moveBindings.keys():
x = moveBindings[key][0]
th = moveBindings[key][1]
count = 0
# 速度修改键
elif key in speedBindings.keys():
speed = speed * speedBindings[key][0] # 线速度增加0.1倍
turn = turn * speedBindings[key][1] # 角速度增加0.1倍
count = 0
print vels(speed,turn)
if (status == 14):
print msg
status = (status + 1) % 15
# 停止键
elif key == ' ' or key == 'k' :
x = 0
th = 0
control_speed = 0
control_turn = 0
else:
count = count + 1
if count > 4:
x = 0
th = 0
if (key == '\x03'):
break
# 目标速度=速度值*方向值
target_speed = speed * x
target_turn = turn * th
# 速度限位,防止速度增减过快
if target_speed > control_speed:
control_speed = min( target_speed, control_speed + 0.02 )
elif target_speed < control_speed:
control_speed = max( target_speed, control_speed - 0.02 )
else:
control_speed = target_speed
if target_turn > control_turn:
control_turn = min( target_turn, control_turn + 0.1 )
elif target_turn < control_turn:
control_turn = max( target_turn, control_turn - 0.1 )
else:
control_turn = target_turn
# 创建并发布twist消息
twist = Twist()
twist.linear.x = control_speed;
twist.linear.y = 0;
twist.linear.z = 0
twist.angular.x = 0;
twist.angular.y = 0;
twist.angular.z = control_turn
pub.publish(twist)
except:
print e
finally:
twist = Twist()
twist.linear.x = 0; twist.linear.y = 0; twist.linear.z = 0
twist.angular.x = 0; twist.angular.y = 0; twist.angular.z = 0
pub.publish(twist)
termios.tcsetattr(sys.stdin, termios.TCSADRAIN, settings)
打开新的终端,依次输入以下命令:
cd car_ws
source ./devel/setup.bash
roslaunch mbot_teleop mbot_teleop.launch
出现下图即证明运行成功

自动旋转ROS小车(rviz+urdf+xacro)(附加python操作键盘控制小车运动)的更多相关文章
- <ROS> 机器人描述--URDF和XACRO
文章转自 https://blog.csdn.net/sunbibei/article/details/52297524 特此鸣谢原创作者的辛勤付出 1 URDF 文件 1.1 link和joint ...
- RVIZ实现模拟控制小车
RVIZ是一个强大的可视化工具,可以看到机器人的传感器和内部状态. 1.安装rbx1功能包Rbx1是国外一本关于ros的书中的配套源码,包含了机器人的基本仿真.导航.路径规划.图像处理.语音识别等等. ...
- IOS6屏幕旋转详解(自动旋转、手动旋转、兼容IOS6之前系统)
转自 http://blog.csdn.net/zzfsuiye/article/details/8251060 概述: 在iOS6之前的版本中,通常使用 shouldAutorotateToInte ...
- iOS系统自带的 UIAlertView 自动旋转的实现
这里主要解析 UIAlertView 的几个关键功能的实现: 随着设备屏幕的旋转而旋转: Alert弹出框,使用UIWindow来实现,就是说,不用依赖于当前显示在最前面的UIView. 实现源码参考 ...
- IOS某个ViewController禁止自动旋转
IOS屏幕自动旋转,强制横竖屏方法: - (BOOL)shouldAutorotate { return YES; } - (NSUInteger)supportedInterfaceOrientat ...
- Unity3d物体模型(实现旋转缩放平移自动旋转)
基本功能实现:物体通过鼠标左键上下移动,中间键缩放.右键旋转,30秒没操作,物体自动旋转 实例代码: using UnityEngine; using System.Collections; publ ...
- 安装好ubuntu 18.10之后,屏幕一直在自动旋转,怎么办?
sudo apt-get install okular dia gimp Gparted sudo add-apt-repository universesudo apt install gnome- ...
- Unity3D研究院之设置自动旋转屏幕默认旋转方向
如下图所示,在处理屏幕默认旋转方向的时候可以在这里进行选择,上下左右一共是4个方向. 策划的需求是游戏采用横屏,但是要求支持两个方向自动旋转,如下图所示,我的设置是这样的. Default Orien ...
- Androidの解决自动旋转导致activity重启问题
记录一下,经常在新建项目的时候就会发生这个问题,正好上次有个群友也问道了这个问题.就是设备屏幕打开自动旋转会导致activity重启,这样会消耗很多资源. 比如在加载listview数据会重新请求数据 ...
- 【转】Unity3D研究院之设置自动旋转屏幕默认旋转方向
http://www.xuanyusong.com/archives/2871 如下图所示,在处理屏幕默认旋转方向的时候可以在这里进行选择,上下左右一共是4个方向. 策划的需求是游戏采用横屏,但是要求 ...
随机推荐
- Python包管理不再头疼:uv工具快速上手
Python 包管理生态中存在多种工具,如 pip.pip-tools.poetry.conda 等,各自具备一定功能. 而今天介绍的uv 是 Astral 公司推出的一款基于 Rust 编写的 Py ...
- 阿里云产品之数据中台架构-copy
1. 场景描述 客户打包买了很多阿里云的产品,但是阿里云不负责实施,基于阿里云产品与客户需求,拟采用的数据中台架构,有类似需求的,可以参考下,拿走不谢! 2. 解决方案 阿里产品大数据架构图: 从下到 ...
- 工作流调度器-Azkaban
1.工作流调度器 1.为什么需要工作流调度系统 一个完整的数据分析系统通常都是由大量任务单元组成: shell脚本程序,java程序,mapreduce程序.hive脚本等 各任务单元之间存在时间先后 ...
- Practical Secure Aggregation for Privacy-Preserving Machine Learning
1 介绍 本文是谷歌团队发在CCS2017上的文章,旨在解决联邦学习中安全聚合的问题. 安全聚合:多方参与者将信息传递给聚合者,聚合者除了知道这个信息的总和不能知道任何一个特定参与者的信息. 在这篇文 ...
- Superset 筛选器理解
免于被筛选器筛选,dashboard中,编辑,高级,"__time_range": {"scope": ["ROOT_ID"], " ...
- Kotlin:【针对空安全管理的操作】安全调用操作符、使用带let的安全调用、非空断言操作符(感叹号操作符)、使用if判断null值情况、使用空合并操作符(类似三元表达式)
具体使用:
- 280:监控和管理LINUX进程
- Sybaris pg walkthrough Intermediate 从redis 到 rce
nmap ┌──(root㉿kali)-[~/lab] └─# nmap -p- -A 192.168.166.93 Starting Nmap 7.94SVN ( https://nmap.org ...
- unicode编码 asis_2019_unicorn_shop
这题就是让我们购买第四个商品 当我们输入price为1337.0的时候他会报错,显示要我们只输入一个字符 那么我们就要想怎样用一个字符来表示一个比1337还要大的数字 答案是unicode 编码 (题 ...
- 搭建个人AI知识库:RAG与本地模型实践指南
引言 你是否想过拥有一个私人订制的AI助手,能够随时为你提供最个性化的信息?本文将带你一步步搭建一个基于本地模型和RAG技术的个人知识库. 搭建本地模型 环境 os: archlinux 内存: 32 ...