rk3568 | 瑞芯微平台GPIO引脚驱动编写
最近在玩瑞芯微平台的产品,移植了几个设备的驱动,遇到了一些问题,总结后发现大部分问题都出在了GPIO配置的问题上,写下本篇文章,用来分享一下调试的心得。
有喜欢瑞芯微的朋友,可以加我好友,拉你进群,一起学习进步。
0、前言
本文基于rk3568平台。
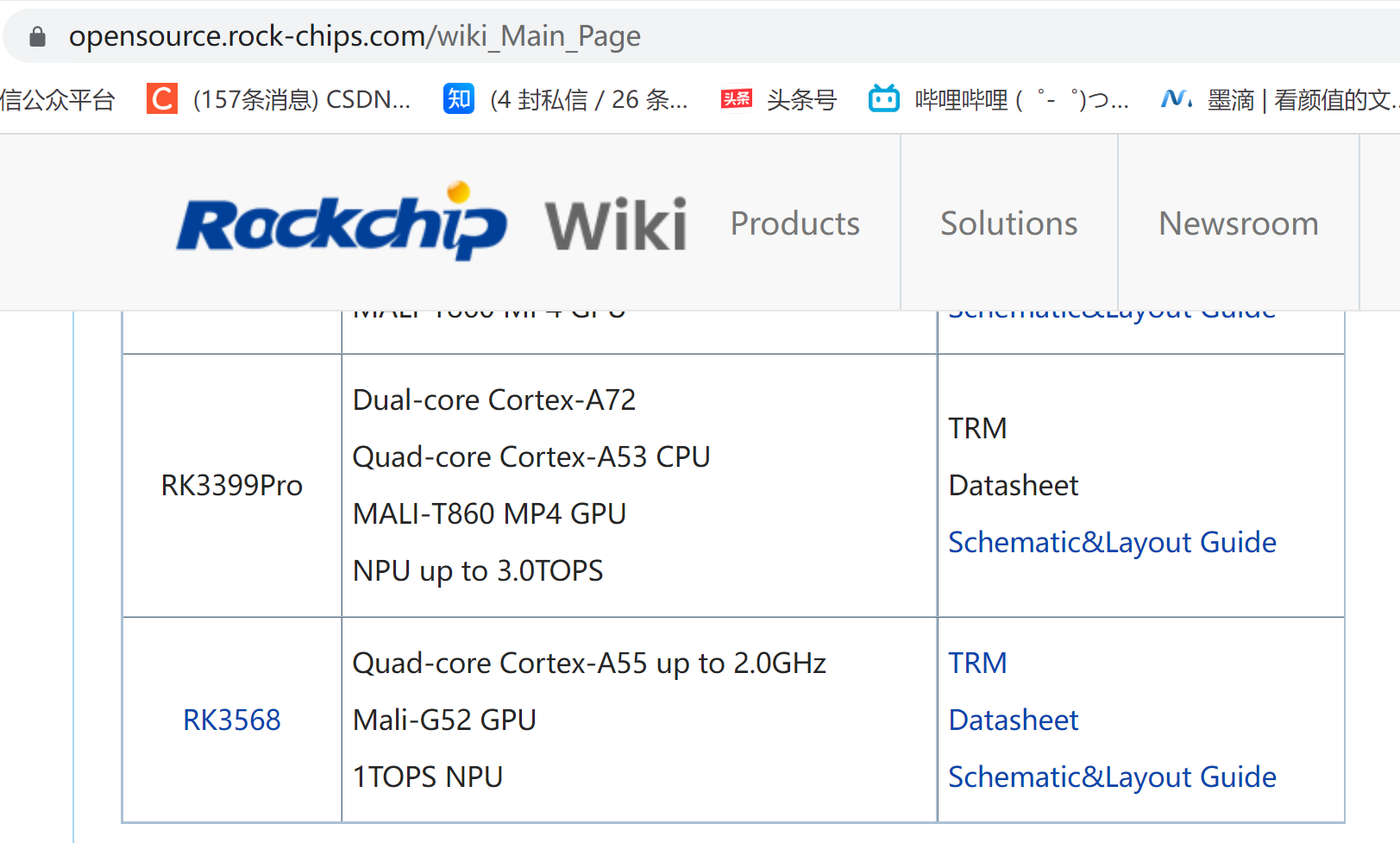
要查看rk3568 GPIO分组及地址信息,需要查看TRM手册,下载地址:
http://opensource.rock-chips.com
也可以公-众-号后台回复:rxw
可获取更丰富的资料。
一、RXW-GPIO介绍
GPIO(General Purpose Input/Output Port):通用输入输出端口。
除作为一般的输入/输出功能外,还可以配置为中断和模拟UART、CAN、PWM、I2C、SDMMC、CLK等功能。
1. GPIO分组
一共有5组GPIO(GPIO0~4),每组GPIO为一个Bank,共32个引脚。
每个Bank包括4个 **Group (GPIOA(0~7) ~ D( 0~7)) **。
RK3568共160个GPIO引脚。
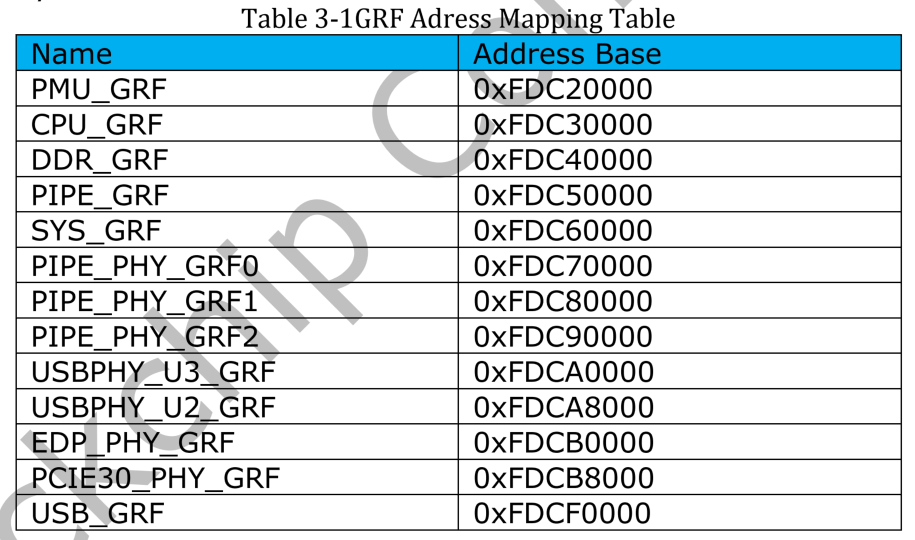
GRF(General Register Files)做了分组,
PMU_GRF, used for always on logic control
CPU_GRF, used for always on system
DDR_GRF, used for DDR system
PIPE_GRF, used for pipe interface controller,
SYS_GRF, used for general system
PIPEPHY_GRF,used for pipe interface phy
USBPHY_U3_GRF,used for usb3 phy
USBPHY_U2_GRF,used for usb2 phy
EDP_PHY_GRF,used for eDP PHY control
PCIEPHY_GRF,used for pcie3.0 phy
USB_GRF,used for usb2 host controller
要查找GPIO对应的配置寄存器地址,必须知道他属于哪个分组:
2. GPIO引脚号计算方式:
pins = 32*bank_num + 8*group + x
bank_num : 0 ~ 4,对应GPIO 0~4
group : 0 ~ 3,对应GPIO A~D
例如GPIO2 A2:
GPIO2_A2 = 32*2 + 8*0 + 2 = 66
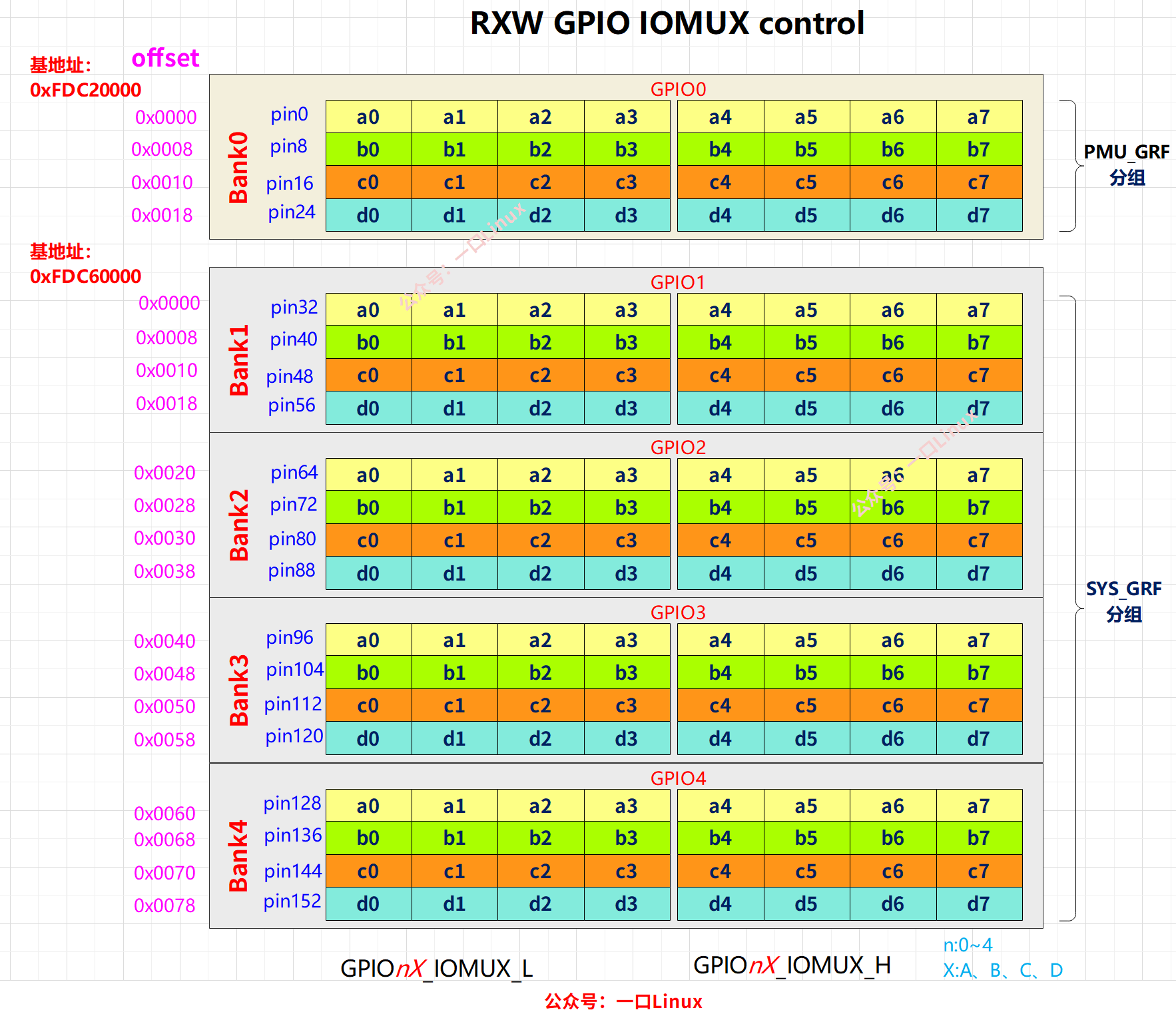
由上图可得:
- gpio0 bank属于PMU分组, 基地址:0xFDC20000
- gpio0~4 bank 属于SYS分组,基地址:0xFDC60000
- GPIO0 bank控制pin0~31
- GPIO1 bank控制pin32~63
- GPIO2 bank控制pin64~95
- GPIO3 bank控制pin96~127
- GPIO4 bank控制pin128~159
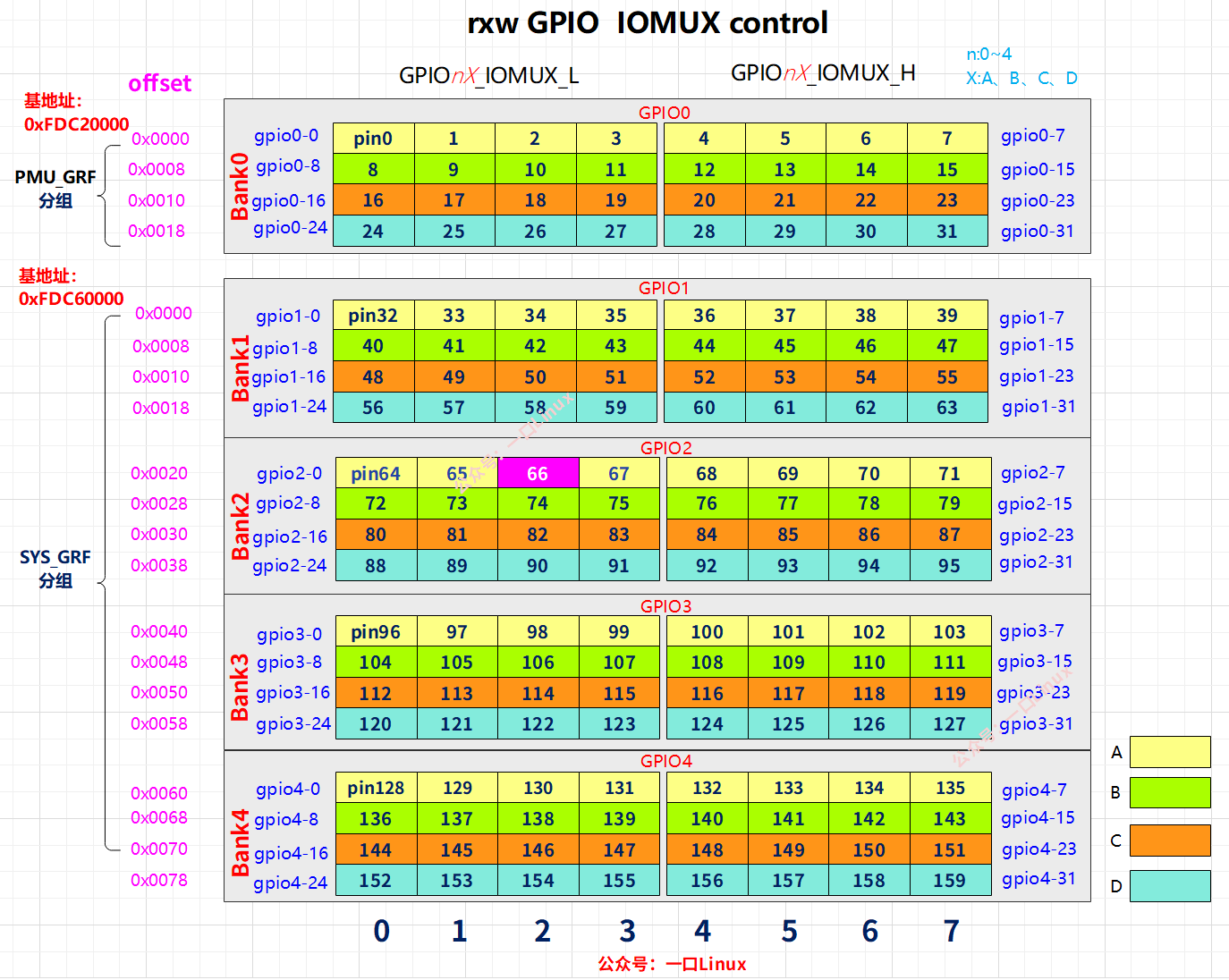
通过上图,很方便查找到对应的GPIO引脚号以及IOMUX control寄存器地址。
一口君还画了下面这个图,大家根据自己喜好,看看哪一个比较好:
3. sys文件查看pin与gpio号之间映射
也可以用debugfs来查看pin与gpio号之间映射关系
rk3568_r:/sys/kernel/debug/pinctrl/pinctrl-rockchip-pinctrl # cat pins
cat pins
registered pins: 160
## GPIO 0_*包括的GPIO
pin 0 (gpio0-0)
pin 1 (gpio0-1)
pin 2 (gpio0-2)
pin 3 (gpio0-3)
pin 4 (gpio0-4)
pin 5 (gpio0-5)
pin 6 (gpio0-6)
pin 7 (gpio0-7)
pin 8 (gpio0-8)
……
## GPIO 1_*包括的GPIO
pin 32 (gpio1-0)
pin 33 (gpio1-1)
pin 34 (gpio1-2)
pin 35 (gpio1-3)
pin 36 (gpio1-4)
pin 37 (gpio1-5)
pin 38 (gpio1-6)
pin 39 (gpio1-7)
pin 40 (gpio1-8)
……
## GPIO 2_*包括的GPIO
pin 64 (gpio2-0)
pin 65 (gpio2-1)
pin 66 (gpio2-2)
pin 67 (gpio2-3)
pin 68 (gpio2-4)
pin 69 (gpio2-5)
pin 70 (gpio2-6)
pin 71 (gpio2-7)
pin 72 (gpio2-8)
……
## GPIO 3_*包括的GPIO
pin 96 (gpio3-0)
pin 97 (gpio3-1)
pin 98 (gpio3-2)
pin 99 (gpio3-3)
pin 100 (gpio3-4)
pin 101 (gpio3-5)
pin 102 (gpio3-6)
pin 103 (gpio3-7)
pin 104 (gpio3-8)
……
## GPIO 2_*包括的GPIO
pin 128 (gpio4-0)
pin 129 (gpio4-1)
pin 130 (gpio4-2)
pin 131 (gpio4-3)
pin 132 (gpio4-4)
pin 133 (gpio4-5)
pin 134 (gpio4-6)
pin 135 (gpio4-7)
pin 136 (gpio4-8)
……
pin 159 (gpio4-31)
二、rk3568GPIO控制器驱动
1. gpio相关api
Linux内核GPIO主要实现文件:
drivers/gpio/gpiolib.c ## 新版API,基于描述符(descriptor-based)
drivers/gpio/gpiolib-legacy.c ## 旧API
include/linux/gpio.h
GPIO子系统有两套API:
- 基于描述符(descriptor-based)
前缀为:
gpiod_
参考:
Documentation/gpio/consumer.txt
- 老版本接口(legacy)
前缀为:
gpio_
参考:
Documentation/gpio/gpio-legacy.txt
API对比:
| 功能 | 新版本接口 | 老版本接口 |
|---|---|---|
| 获取GPIO | gpiod_get() | gpio_request() |
| 释放GPIO | gpiod_put() | gpio_free() |
| 设置GPIO输入 | gpiod_direction_input() | gpio_direction_input() |
| 设置GPIO输出 | gpiod_direction_output() | gpio_direction_output() |
| 获取方向 | gpiod_get_direction() | gpio_get_direction( ) |
| 获取输入值 | gpiod_get_value() | gpio_get_value() |
| 设置输出值 | gpiod_set_value() | gpio_set_value() |
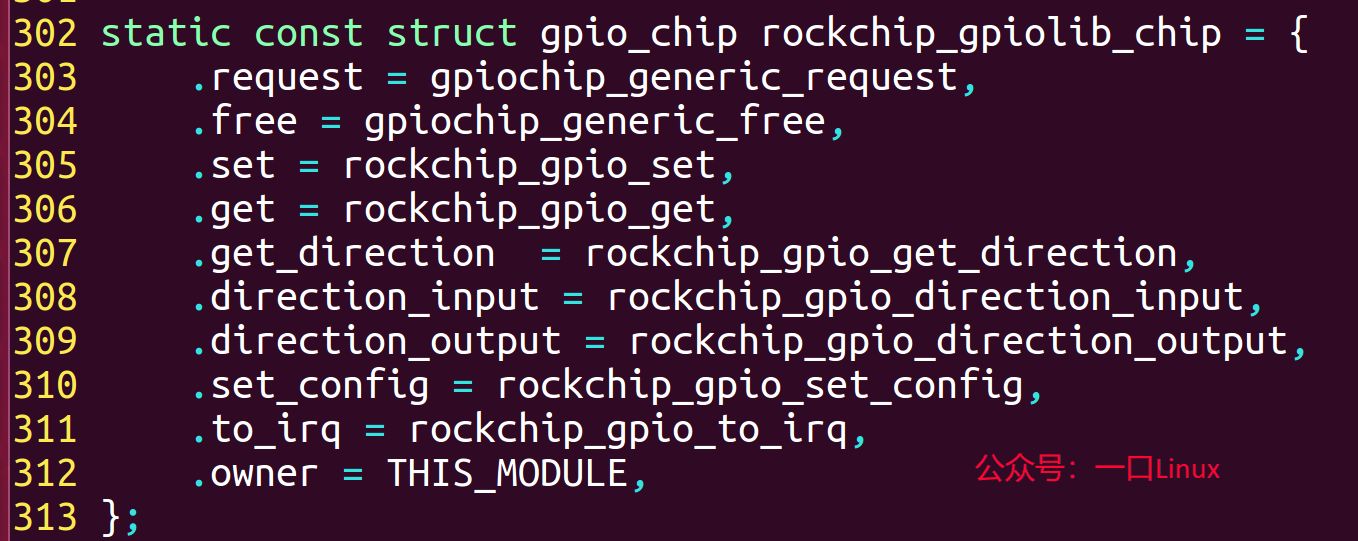
2. rk3568 GPIO控制器驱动
GPIO控制器驱动实现文件:
drivers/pinctrl/pinctrl-rockchip.c
gpio涉及主要函数:
kernel/drivers/gpio/gpio-rockchip.c
三、gpio驱动编写实例
下面以实际项目中的一个应用为例来讲解,如何在一个项目中增加一个控制GPIO的逻辑,一看就会。
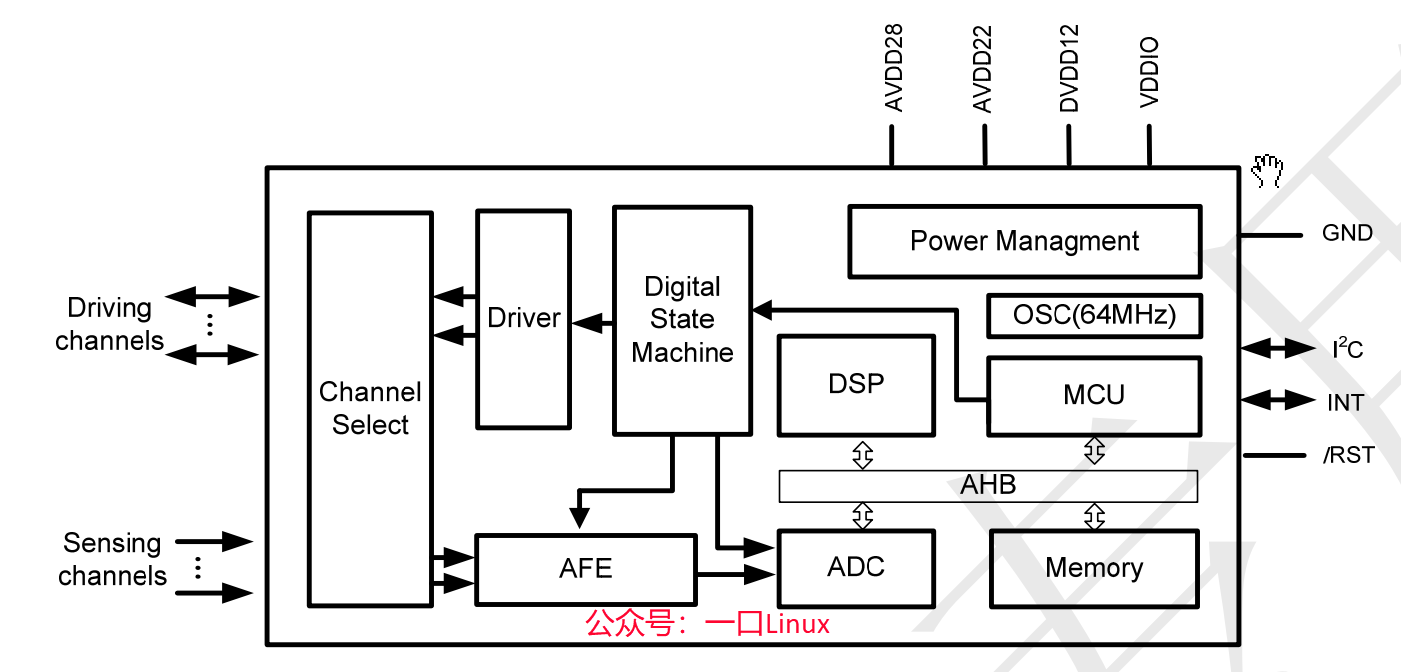
0. 应用场景:
触摸屏GT1X,触摸屏的设备树和驱动官方均已提供,硬件信息比如INT、RST、I2C按照实例填写即可。
&i2c1 {
status = "okay";
gt1x: gt1x@14 {
compatible = "goodix,gt1x";
reg = <0x14>;
interrupt-parent = <&gpio0>;
interrupts = <RK_PD5 IRQ_TYPE_LEVEL_LOW>;
pinctrl-names = "default";
pinctrl-0 = <&touch_gpio>;
goodix,rst-gpio = <&gpio0 RK_PB6 GPIO_ACTIVE_HIGH>;
goodix,irq-gpio = <&gpio0 RK_PB5 IRQ_TYPE_LEVEL_LOW>;
};
};
【pinctrl信息】
&pinctrl {
…………
touch {
touch_gpio: touch-gpio {
rockchip,pins =
<0 RK_PB5 RK_FUNC_GPIO &pcfg_pull_up>,
<0 RK_PB6 RK_FUNC_GPIO &pcfg_pull_none>,
};
};
…………
};
但是实际应用中,因为硬件设计需要,有一路点供电引脚AVDD需要由gpio2 A2来提供,
下面我们介绍一下如何再已有的设备树、驱动基础上添加这个GPIO的功能。
1. 设备树
首先我们需要添加该引脚的设备树信息,
gt1x: gt1x@14 {
……
goodix,ana-gpio = <&gpio2 RK_PA2 GPIO_ACTIVE_HIGH>;
……
}
&pinctrl {
…………
touch {
touch_gpio: touch-gpio {
rockchip,pins =
<0 RK_PB5 RK_FUNC_GPIO &pcfg_pull_up>,
<0 RK_PB6 RK_FUNC_GPIO &pcfg_pull_none>,
<2 RK_PA2 RK_FUNC_GPIO &pcfg_pull_none>;
};
};
…………
};
其中添加的设备树节点含义如下:
<2 RK_PA2 RK_FUNC_GPIO &pcfg_pull_none>;
2 RK_PA2 : 表示gpio2 PA2,
RK_FUNC_GPIO : IOMUX,即要设置的该引脚的功能
pcfg_pull_none :表示采用默认的驱动强度
RK_PA2、RK_FUNC_GPIO 定义位于:
[include/dt-bindings/pinctrl/rockchip.h]
#define RK_GPIO0 0
#define RK_GPIO1 1
#define RK_GPIO2 2
#define RK_GPIO3 3
#define RK_GPIO4 4
#define RK_GPIO6 6
#define RK_PA0 0
#define RK_PA1 1
#define RK_PA2 2
#define RK_PA3 3
#define RK_PA4 4
……………………
#define RK_PD6 30
#define RK_PD7 31
#define RK_FUNC_GPIO 0
#define RK_FUNC_0 0
#define RK_FUNC_1 1
#define RK_FUNC_2 2
#define RK_FUNC_3 3
……………………
#define RK_FUNC_15 15
pcfg_pull_none 定义位于:
[arch/arm64/boot/dts/rockchip/rockchip-pinconf.dtsi]
&pinctrl {
……………………
/omit-if-no-ref/
pcfg_pull_none: pcfg-pull-none {
bias-disable;
};
/omit-if-no-ref/
pcfg_pull_none_drv_level_0: pcfg-pull-none-drv-level-0 {
bias-disable;
drive-strength = <0>;
};
/omit-if-no-ref/
pcfg_pull_none_drv_level_1: pcfg-pull-none-drv-level-1 {
bias-disable;
drive-strength = <1>;
};
……………………
};
如果gpio的驱动强度不够,可以修改对应属性。
2. 驱动代码编写
我们把所有GPIO操作相关代码抽取出来如下:
- 定义
int gt1x_ana_gpio;
#define GTP_ANA_PORT gt1x_ana_gpio
- 注册
ret = gpio_request(GTP_ANA_PORT, "GTP_ANA_PORT");
if (ret < 0) {
GTP_ERROR("Failed to request GPIO:%d, ERRNO:%d", (s32) GTP_ANA_PORT, ret);
return ret;
}
- 控制电平
拉高:
gpio_direction_output(GTP_ANA_PORT, 1);
拉低:
gpio_direction_output(GTP_ANA_PORT, 0);
- 释放
if (gpio_is_valid(gt1x_ana_gpio))
gpio_free(gt1x_ana_gpio);
3. 添加到触摸屏GT1X驱动中
关于触摸屏驱动,一口君后面会写相应的文章来给大家详细讲解。
下面讲解一下,我是如何将GPIO的操作移植到gt1x驱动中的。
瑞芯微的sdk已经包含了触摸屏驱动:
drivers/input/touchscreen/gt1x/
├── gt1x.c
├── gt1x_cfg.h
├── gt1x_extents.c
├── gt1x_firmware.h
├── gt1x_generic.c
├── gt1x_generic.h
├── gt1x.h
├── gt1x_tools.c
├── gt1x_update.c
├── GT5688_Config_20170713_1080_1920.cfg
└── Makefile
0 directories, 11 files
- 增加该GPIO变量定义
[drivers/input/touchscreen/gt1x/gt1x.h]
#define GTP_ANA_PORT gt1x_ana_gpio
[drivers/input/touchscreen/gt1x/gt1x.c]
int gt1x_ana_gpio;
- 设备解析函数gt1x_parse_dt(),添加解析该引脚的代码
[drivers/input/touchscreen/gt1x/gt1x.c]
302 static int gt1x_parse_dt(struct device *dev)
303 {
…………
325 gt1x_ana_gpio = of_get_named_gpio(np, "goodix,ana-gpio", 0);
326 + if (!gpio_is_valid(gt1x_int_gpio) || !gpio_is_valid(gt1x_rst_gpio) || !gpio_is_valid(gt1x_ana_gpio)) {
327 + GTP_ERROR("Invalid GPIO, irq-gpio:%d, rst-gpio:%d,ana_gpio:%d",
328 + gt1x_int_gpio, gt1x_rst_gpio,gt1x_ana_gpio);
329 return -EINVAL;
330 }
331 + printk("gt1x gpio int=%d rst=%d ana=%d\n",gt1x_int_gpio,gt1x_rst_gpio,gt1x_ana_gpio);
………………
}
- 在函数gt1x_request_io_port()中增加申请申请该GPIO资源的代码
400 static s32 gt1x_request_io_port(void)
401 {
402 s32 ret = 0;
…………………………
421 GTP_GPIO_AS_INPUT(GTP_RST_PORT);
+ ret = gpio_request(GTP_ANA_PORT, "GTP_ANA_PORT");
+ if (ret < 0) {
+ GTP_ERROR("Failed to request GPIO:%d, ERRNO:%d", (s32) GTP_ANA_PORT, ret);
+ gpio_free(GTP_INT_PORT);
+ gpio_free(GTP_RST_PORT);
+ return ret;
+ }
422 return 0;
423 }
- 在释放GPIO和中断的函数gt1x_remove_gpio_and_power()释放该gpio资源
384 static void gt1x_remove_gpio_and_power(void)
385 {
386 if (gpio_is_valid(gt1x_int_gpio))
387 gpio_free(gt1x_int_gpio);
388
389 if (gpio_is_valid(gt1x_rst_gpio))
390 gpio_free(gt1x_rst_gpio);
391
+ if (gpio_is_valid(gt1x_ana_gpio))
+ gpio_free(gt1x_ana_gpio);
392 if (gt1x_i2c_client && gt1x_i2c_client->irq)
393 free_irq(gt1x_i2c_client->irq, gt1x_i2c_client);
394 }
- 在什么位置控制该GPIO?
触摸屏上电时序图:
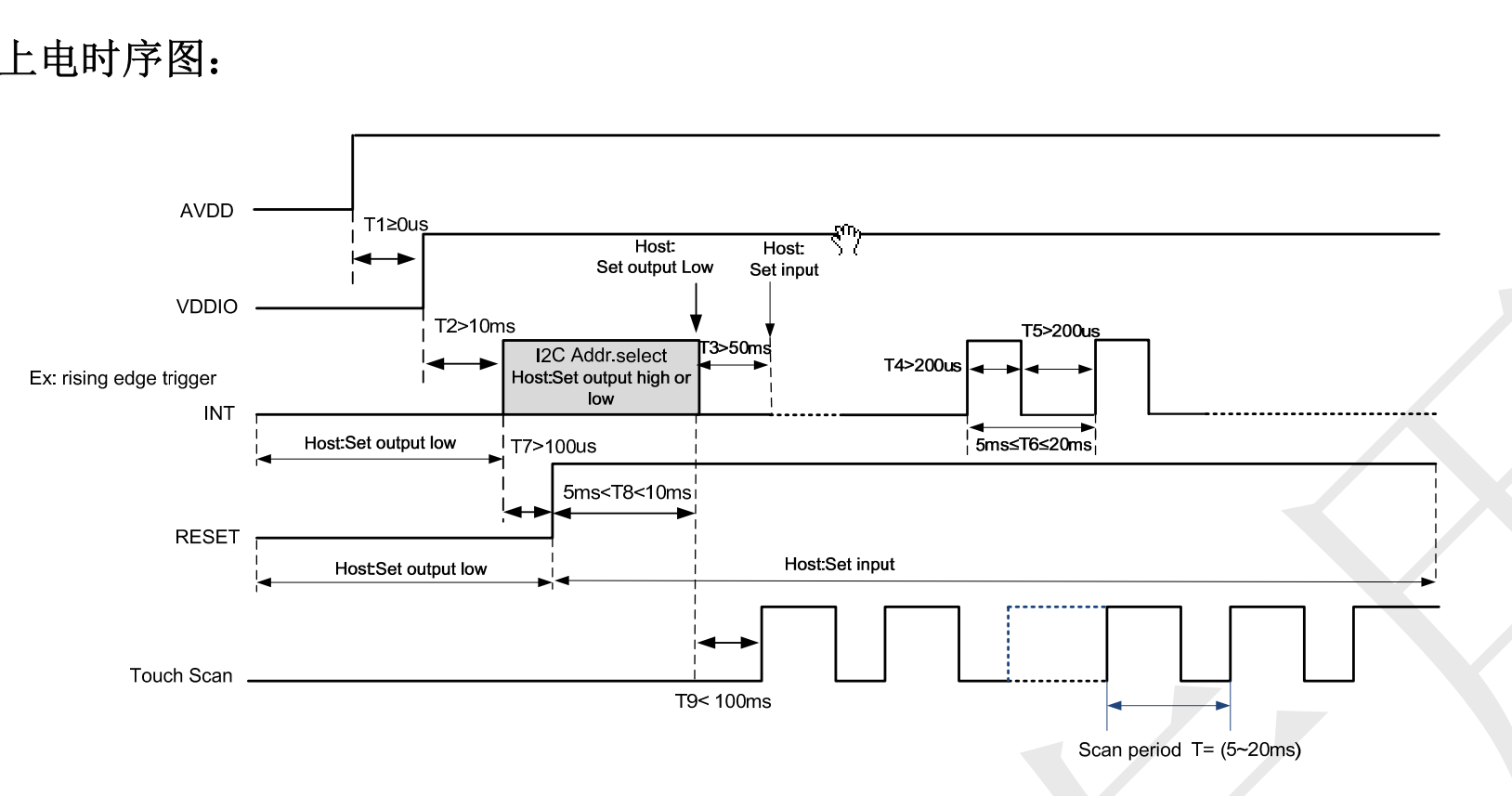
由上图可知,上电的时候,必须首先把AVDD拉高,然后才能继续后续的操作。
之前的驱动是借用系统的电,但是本例是用GPIO来提供这个电。
触摸屏驱动已经写好了相应的架构,AVDD上电/关闭均封装到了函数gt1x_power_switch(),
系统上电初始化会调用该函数,
s32 gt1x_init(void)
{
/* power on */
gt1x_power_switch(SWITCH_ON);
}
同时当屏幕息屏的时候pm子系统会通过对应的回调函数,调用休眠函数gt1x_pm_suspend(),唤醒屏幕会调用gt1x_pm_resume(),
static const struct dev_pm_ops gt1x_ts_pm_ops = {
.suspend = gt1x_pm_suspend,
.resume = gt1x_pm_resume,
};
他们也会在何时的实际调用gt1x_power_switch(),
我们只需要在该函数中加上GPIO拉高、拉低的操作即可。
365 int gt1x_power_switch(int on)
366 {
367 int ret;
368 struct i2c_client *client = gt1x_i2c_client;
369
370 // if (!client || !vdd_ana) 注释掉
371 // return -1;
372
373 if (on) {
374 GTP_DEBUG("GTP power on.");
375 // ret = regulator_enable(vdd_ana);注释掉
+ GTP_GPIO_OUTPUT(GTP_ANA_PORT, 1);
376 } else {
377 GTP_DEBUG("GTP power off.");
378 // ret = regulator_disable(vdd_ana);注释掉
+ GTP_GPIO_OUTPUT(GTP_ANA_PORT, 0);
379 }
380 return ret;
381 }
382 #endif
- 此外 ,原有的供电代码都需要删除。
298 //static struct regulator *vdd_ana;
331 #if 0
332 vdd_ana = devm_regulator_get_optional(dev, "vdd_ana");
333 if (PTR_ERR(vdd_ana) == -ENODEV) {
334 GTP_ERROR("vdd_ana not specified, fallback to power-supply");
335 vdd_ana = devm_regulator_get_optional(dev, "power");
336 if (PTR_ERR(vdd_ana) == -ENODEV) {
337 GTP_ERROR("power not specified, ignore power ctrl");
338 vdd_ana = NULL;
339 }
340 }
341 if (IS_ERR(vdd_ana)) {
342 GTP_ERROR("regulator get of vdd_ana/power-supply failed");
343 return PTR_ERR(vdd_ana);
344 }
345 #endif
四、 查看已经申请了的GPIO
系统启动后,可以通过debugfs查看GPIO分配情况
rk3568_r:/sys/kernel/debug # cat gpio
cat gpio
gpiochip0: GPIOs 0-31, parent: platform/fdd60000.gpio, gpio0:
gpio-5 ( |vcc5v0_otg ) out lo
gpio-6 ( |vcc5v0_host ) out hi
gpio-13 ( |GTP_INT_IRQ ) in hi
gpio-14 ( |GTP_RST_PORT ) out hi
gpio-16 ( |work ) out lo
gpio-17 ( |vcc_camera ) out hi
gpio-18 ( |hpd ) in lo
……………………
gpiochip1: GPIOs 32-63, parent: platform/fe740000.gpio, gpio1:
gpiochip2: GPIOs 64-95, parent: platform/fe750000.gpio, gpio2:
gpio-66 ( |GTP_ANA_PORT ) out lo
gpio-73 ( |bt_default_rts ) in hi
gpio-89 ( |mdio-reset ) out hi
gpio-91 ( |mdio-reset ) out hi
gpio-94 ( |reset ) out lo
……………………
可以看到设备树中的3个GPIO信息:
gpio-13 ( |GTP_INT_IRQ ) in hi
gpio-14 ( |GTP_RST_PORT ) out hi
gpio-66 ( |GTP_ANA_PORT ) out lo
如果debugfs没有挂在,使用下面命令挂载
mount -t debugfs none /sys/kernel/debug
五、总结
实际上,GPIO编写还是很简单的,驱动不论多复杂,最终都还是由这些基本的函数来实现的,
这是因为在开发一个新的产品的时候,sdk中很多硬件的配置信息,往往是厂家自己出厂的一个demo板子的硬件信息,
而很多GPIO功能的配置可能和我们实际需求有差异,
经常出现某个设备的GPIO配置了,但是工作却不正常的情况发生,
烟瘾就是iomux并不是自己所需要的功能,
下一篇,给大家详细讲解,如何定位GPIO复用的问题。
rk3568 | 瑞芯微平台GPIO引脚驱动编写的更多相关文章
- 瑞芯微RK3399宣布系统开源,进入百余种行业市场!
集微网消息,2月24日瑞芯微官方突然宣布, Rockchip RK3399Linux系统开源!作为Rockchip旗舰级芯片,RK3399具有高性能.高扩展.全能型应用特性. 这一重磅消息立马刷爆朋友 ...
- Linux下更新瑞芯微固件
有这样的需求,是因为提供的BSP中是在windows下烧写的系统.我直接在linux下开发,每次编译后代码都要在windows下烧写,是一个很麻烦的事情.为了解决这个问题我尝试着用VirtualBox ...
- 9.7寸RK3188瑞芯微四核爱立顺M33平板电脑 - 深圳吉祥星晨科技有限公司 - 华强商情网
9.7寸RK3188瑞芯微四核爱立顺M33平板电脑 - 深圳吉祥星晨科技有限公司 - 华强商情网 欢迎加入 2000人超级QQ群,平板电脑行业交流群:221371451,平板电脑产品及报价群:5765 ...
- 瑞芯微发布最新旗舰应用处理器-RK3588
在瑞芯微电子第四届“开发者之春”大会上,瑞芯微推出了新一代8nm旗舰处理器-RK3588 这个芯片将采用8nm 制程工艺.基于A76+A55 内核组合,具备4K UI性能.8K VPU,拥有NPU2. ...
- 瑞芯微ROCK960 RK3399固件烧录总结
1 下载固件 进入瑞芯微ROCK960下载主页 https://www.96boards.org/documentation/consumer/rock/downloads/ 选择os固件, Debi ...
- 瑞芯微RK3399六核-迅为3399开发板介绍
迅为3399开发板基于瑞芯微的RK3399处理器设计,Rockchip RK3399是瑞芯微推出的一款低功耗.高性能的应用处理器芯片,该芯片基于Big.Little架构,即具有独立的NEON协同处理器 ...
- 宁远电子瑞芯微RK3399开发板DLT3399A底层接口调用
GPIO口控制 在DLT3399A板卡正面写有GPIO和UART4_1V8丝印的接口,并看到板子反面对应的引脚gpio丝印,选择相对应的gpio控制节点,接口位置如下图所示: 1.dlt3399a上 ...
- 瑞芯微RK3188如何配置USB摄像头支持
- 瑞芯微RK3188摄像头相关参数的配置
- 瑞芯微RKnanC芯片处理器介绍
RKnanC是一种低成本.低功耗.高效率的数字多媒体芯片,它是基于ARM的低功耗处理器结构和硬件加速器.它是专为便携式音频产品应用,如MP3播放器等. RKnanC可以支持各种音频标准的解码,如MP3 ...
随机推荐
- CSS和CSS3(背景,图片,浮动等)
CSS和CSS3背景图片 CSS的背景,无法伸缩图片. <!DOCTYPE html> <html lang="en"> <head> < ...
- 信奥一本通1164:digit函数
1164:digit函数 时间限制: 1000 ms 内存限制: 65536 KB 提交数:41504 通过数: 26475 [题目描述] 在程序中定义一函数digit(n,k) ,它能分离出整数n ...
- 含税仅498元起!复旦微ARM + FPGA SoC全国产工业核心板,性价比真高!
- 对linux的理解--个人理解
linux系统中的命令我觉得可以和windows上的点点点,如文件的查找,文件的新建.删除,用户的添加.删除等来对比理解.一个是点点点,一个是用命令来完成. --------------------- ...
- NEEPU Sec 2023 Misc 两题题记
GoingOn 题目描述 Keep going on channel 1 ;D 考察的是 midi lsb隐写 MIDI文件概述 CSV文件概述 midi转csv工具 midicsv 将 MIDI 文 ...
- WPF实现TextBlock呼吸灯效果
实现代码 <TextBlock Text="录像中" FontSize="48" Foreground="#ED4646" Horiz ...
- CM3调试系统简析
CM3 调试系统简析 **"一直以来,单片机的调试一直不是很突出的主题,很多简单些的程序在开发中,甚至都没有调试的概念,而只是把生成的映像直接烧入片子,再根据错误症状来判断问题,然后修改程序 ...
- 利用opencv库使用Python将视频逐帧转为图片
做成型的语义分割软件需要,写了一个,在博客记录一下 import cv2 def video2pic(videoFile, outputFile): vc = cv2.VideoCapture(vid ...
- [PHP]用socket写一个简单的WEB服务器
今天我就要把我的最新研究成果展示看看,而不玩ARMBIAN了,因为刷了两台S905L3的发现一点挑战都没有 从0.2写WEB服务难啊,你需要懂HTTP协议和SOCKET!不过有经验我们很快就可以搭建一 ...
- Netcode for Entities如何添加自定义序列化,让GhostField支持任意类型?以int3为例(1.2.3版本)
一句话省流:很麻烦也很抽象,能用内置支持的类型就尽量用. 首先看文档.官方文档里一开头就列出了所有内置的支持的类型:Ghost Type Templates 其中Entity类型需要特别注意一下:在同 ...