压缩感知重构算法之OLS算法python实现
压缩感知重构算法之OMP算法python实现
压缩感知重构算法之CoSaMP算法python实现
压缩感知重构算法之SP算法python实现
压缩感知重构算法之IHT算法python实现
压缩感知重构算法之OLS算法python实现
压缩感知重构算法之IRLS算法python实现
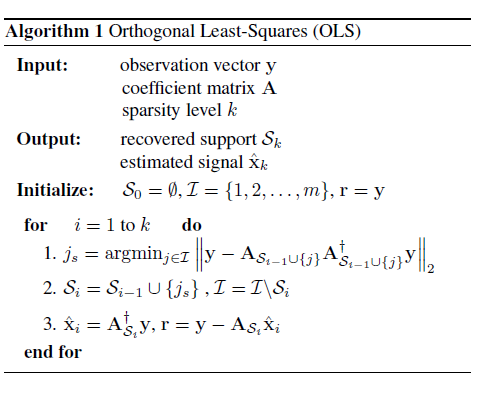
Orthogonal Least Squares (OLS)算法流程
实验
要利用python实现,电脑必须安装以下程序
- python (本文用的python版本为3.5.1)
- numpy python包(本文用的版本为1.10.4)
- scipy python包(本文用的版本为0.17.0)
- pillow python包(本文用的版本为3.1.1)
python代码
#coding: utf-8
'''
#%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
# DCT基作为稀疏基,重建算法为OMP算法 ,图像按列进行处理
# email:ncuzhangben@qq.com,
#%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
'''
#导入集成库
import math
# 导入所需的第三方库文件
import numpy as np #对应numpy包
from PIL import Image #对应pillow包
#读取图像,并变成numpy类型的 array
im = np.array(Image.open('lena.bmp'))
#print (im.shape, im.dtype)uint8
#生成高斯随机测量矩阵
sampleRate=0.7 #采样率
Phi=np.random.randn(256*sampleRate,256)
#生成稀疏基DCT矩阵
mat_dct_1d=np.zeros((256,256))
v=range(256)
for k in range(0,256):
dct_1d=np.cos(np.dot(v,k*math.pi/256))
if k>0:
dct_1d=dct_1d-np.mean(dct_1d)
mat_dct_1d[:,k]=dct_1d/np.linalg.norm(dct_1d)
#随机测量
img_cs_1d=np.dot(Phi,im)
#OLS算法函数(未完成待修改)
def cs_ols(y,D):
L=math.floor(3*(y.shape[0])/4)
residual=y #初始化残差
index=np.zeros((L),dtype=int)
for i in range(L):
index[i]= -1
result=np.zeros((256))
for j in range(L): #迭代次数
pos_temp=np.argsort(np.fabs(np.dot(np.linalg.pinv(D[:,pos]),y)))#对应步骤2
product=np.fabs(np.dot(D.T,residual))
pos=np.argmax(product) #最大投影系数对应的位置
index[j]=pos
my=np.linalg.pinv(D[:,index>=0])
a=np.dot(my,y)
residual=y-np.dot(D[:,index>=0],a)
result[index>=0]=a
return result
#重建
sparse_rec_1d=np.zeros((256,256)) # 初始化稀疏系数矩阵
Theta_1d=np.dot(Phi,mat_dct_1d) #测量矩阵乘上基矩阵
for i in range(256):
print('正在重建第',i,'列。。。')
column_rec=cs_ols(img_cs_1d[:,i],Theta_1d) #利用OMP算法计算稀疏系数
sparse_rec_1d[:,i]=column_rec;
img_rec=np.dot(mat_dct_1d,sparse_rec_1d) #稀疏系数乘上基矩阵
#显示重建后的图片
image2=Image.fromarray(img_rec)
image2.show()
matlab代码
function Demo_CS_OLS()
%------------ read in the image --------------
img=imread('lena.bmp'); % testing image
img=double(img);
[height,width]=size(img);
%------------ form the measurement matrix and base matrix ---------------
Phi=randn(floor(0.5*height),width); % only keep one third of the original data
Phi = Phi./repmat(sqrt(sum(Phi.^2,1)),[floor(0.5*height),1]); % normalize each column
mat_dct_1d=zeros(256,256); % building the DCT basis (corresponding to each column)
for k=0:1:255
dct_1d=cos([0:1:255]'*k*pi/256);
if k>0
dct_1d=dct_1d-mean(dct_1d);
end;
mat_dct_1d(:,k+1)=dct_1d/norm(dct_1d);
end
%--------- projection ---------
img_cs_1d=Phi*img; % treat each column as a independent signal
%-------- recover using omp ------------
sparse_rec_1d=zeros(height,width); % height*width的0矩阵
Theta_1d=Phi*mat_dct_1d;%测量矩阵乘上基矩阵
for i=1:width
column_rec=OLS(img_cs_1d(:,i),Theta_1d);%算法的目的是得到稀疏系数
sparse_rec_1d(:,i)=column_rec'; % sparse representation 稀疏系数
end
img_rec_1d=mat_dct_1d*sparse_rec_1d; % inverse transform 稀疏系数乘上基矩阵
%------------ show the results --------------------
figure(1)
subplot(2,2,1),imshow(uint8(img)),title('original image')
subplot(2,2,2),imagesc(Phi),title('measurement mat')
subplot(2,2,3),imagesc(mat_dct_1d),title('1d dct mat')
psnr = 20*log10(255/sqrt(mean((img(:)-img_rec_1d(:)).^2)));
subplot(2,2,4),imshow(uint8(img_rec_1d));
title(strcat('PSNR=',num2str(psnr),'dB'));
%************************************************************************%
function [s, residual] = OLS(y, A, err)
% Orthogonal Least Squares [1] for Sparse Signal Reconstruction
% Input
% A = N X d dimensional measurment matrix
% y = N dimensional observation vector
% m = sparsity of the underlying signal
% Output
% s = estimated sparse signal
% r = residual
% [1] T. Blumensath, M. E. Davies; "On the Difference Between Orthogonal
% Matching Pursuit and Orthogonal Least Squares", manuscript 2007
if nargin < 3
err = 1e-5;
end
n1=length(y);
m=floor(3*n1/4);
s = zeros(size(A,2),1);
r(:,1) = y; L = []; Psi = [];
normA=(sum(A.^2,1)).^0.5;
NI = 1:size(A,2);
for i = 2:m+1
DR = A'*r(:,i-1);
[v, I] = max(abs(DR(NI))./normA(NI)');
INI = NI(I);
L = [L' INI']';
NI(I)=[];
Psi = A(:,L);
x = Psi\y;
yApprox = Psi*x;
r(:,i) = y - yApprox;
if norm(r(:,end)) < err
break;
end
end
s(L) = x;
residual = r(:,end);
参考文章
1、Blumensath T, Davies M E. On the difference between orthogonal matching pursuit and orthogonal least squares[J]. 2007.
2、Hashemi A, Vikalo H. Sparse Linear Regression via Generalized Orthogonal Least-Squares[J]. arXiv preprint arXiv:1602.06916, 2016.
欢迎python爱好者加入:学习交流群 667279387
压缩感知重构算法之OLS算法python实现的更多相关文章
- 压缩感知重构算法之IRLS算法python实现
压缩感知重构算法之OMP算法python实现 压缩感知重构算法之CoSaMP算法python实现 压缩感知重构算法之SP算法python实现 压缩感知重构算法之IHT算法python实现 压缩感知重构 ...
- 压缩感知重构算法之CoSaMP算法python实现
压缩感知重构算法之OMP算法python实现 压缩感知重构算法之CoSaMP算法python实现 压缩感知重构算法之SP算法python实现 压缩感知重构算法之IHT算法python实现 压缩感知重构 ...
- 压缩感知重构算法之IHT算法python实现
压缩感知重构算法之OMP算法python实现 压缩感知重构算法之CoSaMP算法python实现 压缩感知重构算法之SP算法python实现 压缩感知重构算法之IHT算法python实现 压缩感知重构 ...
- 压缩感知重构算法之SP算法python实现
压缩感知重构算法之OMP算法python实现 压缩感知重构算法之CoSaMP算法python实现 压缩感知重构算法之SP算法python实现 压缩感知重构算法之IHT算法python实现 压缩感知重构 ...
- 压缩感知重构算法之OMP算法python实现
压缩感知重构算法之OMP算法python实现 压缩感知重构算法之CoSaMP算法python实现 压缩感知重构算法之SP算法python实现 压缩感知重构算法之IHT算法python实现 压缩感知重构 ...
- 浅谈压缩感知(三十一):压缩感知重构算法之定点连续法FPC
主要内容: FPC的算法流程 FPC的MATLAB实现 一维信号的实验与结果 基于凸优化的重构算法 基于凸优化的压缩感知重构算法. 约束的凸优化问题: 去约束的凸优化问题: 在压缩感知中,J函数和H函 ...
- 浅谈压缩感知(三十):压缩感知重构算法之L1最小二乘
主要内容: l1_ls的算法流程 l1_ls的MATLAB实现 一维信号的实验与结果 前言 前面所介绍的算法都是在匹配追踪算法MP基础上延伸的贪心算法,从本节开始,介绍基于凸优化的压缩感知重构算法. ...
- 浅谈压缩感知(二十八):压缩感知重构算法之广义正交匹配追踪(gOMP)
主要内容: gOMP的算法流程 gOMP的MATLAB实现 一维信号的实验与结果 稀疏度K与重构成功概率关系的实验与结果 一.gOMP的算法流程 广义正交匹配追踪(Generalized OMP, g ...
- 浅谈压缩感知(二十六):压缩感知重构算法之分段弱正交匹配追踪(SWOMP)
主要内容: SWOMP的算法流程 SWOMP的MATLAB实现 一维信号的实验与结果 门限参数a.测量数M与重构成功概率关系的实验与结果 SWOMP与StOMP性能比较 一.SWOMP的算法流程 分段 ...
随机推荐
- mount 和 /etc/fstab关系。
mount -a 自动按照格式执行/etc/fstab里面的文件. /etc/fstab 文件格式: device mount-point type options ...
- 项目——基于httpd镜像演示Dockerfile所有的指令
基于httpd镜像演示Dockerfile所有的指令: 第一步:创建Dockerfile工作目录 [root@localhost harbor]# mkdir /test [root@localhos ...
- 深入理解计算机系统 第十章 系统级I/O
很多高级语言都提供了执行 I/O 的较高级别的函数.为什么我们还要学习 Unix I/O? 原因:1.由于 I/O 和其他系统概念之间有循环依赖关系,故了解 Unix I/O 将帮助我们理解其他的系统 ...
- vue-create 报错 command failed: yarn --registry=https://registry.npm.taobao.org --disturl=https://npm.taobao.org/dist 完美解决方案
@vue/cli 3.x 创建项目失败解决方案 报错信息 command failed: yarn --registry=https://registry.npm.taobao.org --distu ...
- pat 1084 Broken Keyboard(20 分)
1084 Broken Keyboard(20 分) On a broken keyboard, some of the keys are worn out. So when you type som ...
- nyoj 366-D的小L (next_permutation())
366-D的小L 内存限制:64MB 时间限制:4000ms 特判: No 通过数:5 提交数:7 难度:2 题目描述: 一天TC的匡匡找ACM的小L玩三国杀,但是这会小L忙着哩,不想和匡 ...
- Zabbix-(六) JMX监控
Zabbix-(六) JMX监控 一.前言 Zabbix提供了JMX监控,它通过JMX API获取JVM信息,从而提供监控数据.本文讲述使用JMX监控Tomcat的JVM信息. 准备 Zabbix S ...
- Apache服务安装及一些基本操作
注意:安装apache服务之前记得搭建yum仓库 1.安装apache服务,输入命令“yum install httpd” 安装成功后,会这样显示 2.需要对Apache服务进行启动,输入命令“sys ...
- ES6的基础知识(一)
1.ECMAScript 6.0(以下简称ES6). 2.ECMAScript 和 JavaScript 的关系是,前者是后者的规格,后者是前者的其中一种实现. 3.对ES6支持的浏览器:超过 90% ...
- ubuntu 16.04上源码编译dlib教程 | compile dlib on ubuntu 16.04
本文首发于个人博客https://kezunlin.me/post/c6ead512/,欢迎阅读! compile dlib on ubuntu 16.04 Series Part 1: compil ...