poj 2991 起重机
地址 http://poj.org/problem?id=2991



题解
本来以为这是一个简单的线段树模板 不料始终不太明白线段树如何记录转动角度后的各个线段端的XY值
学习了网络上的一些博客题解 感觉似是而非 谈到复数 角度 向量等,有点不太好理解
现在这里将自己的理解记录如下
如图
1 预备知识
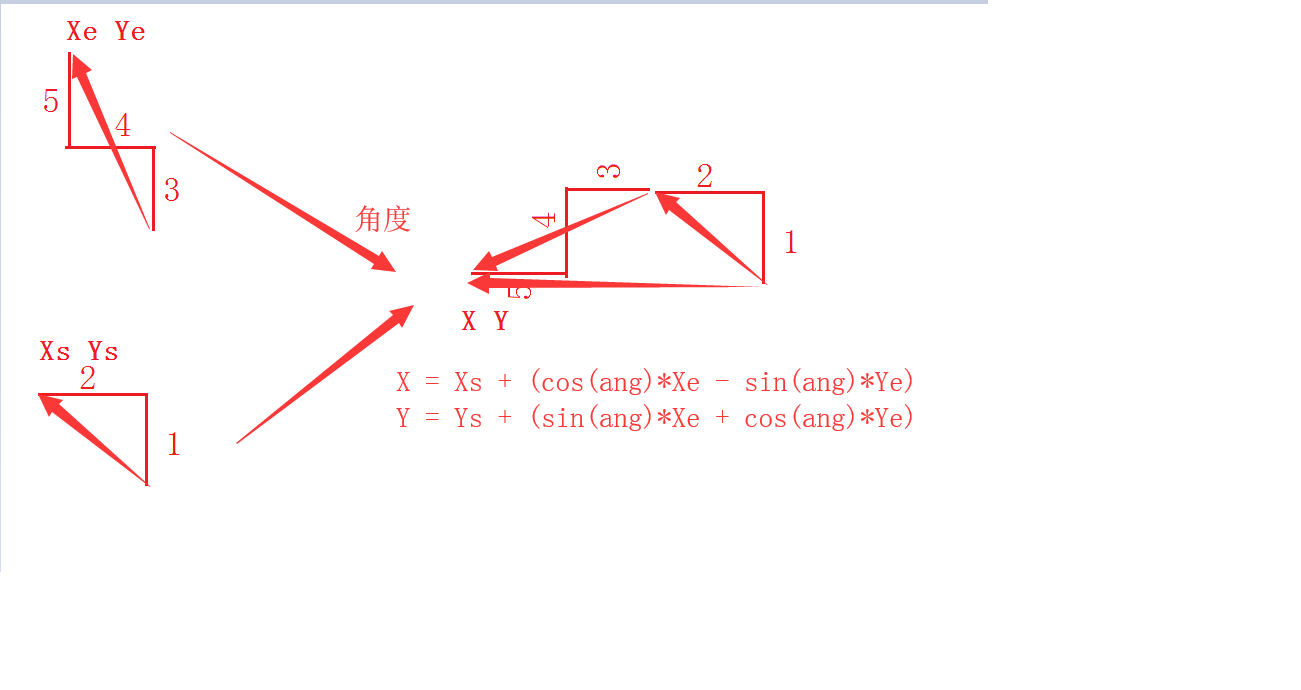
使用线段树记录的内容如下 指示某段线段的组合 以第一条线段为垂直 最后的线段的端点的X Y值
途中1~2 线段 和3~5线段 就是线段树节点1~5的子节点 那么线段树节点1~5 就记录1~5结合后的X Y 值以及两个子节点结合的角度值
由于3~5线段的XY 是以自己的第一条线段为垂直起点为0 0 计算出来的X Y
那么在于1~2线段合并的时候 并不是简单的将两子节点的X Y相加即可得到1~5线段的XY 而是要加入旋转了相对角度 该角度由记录1~5线段的线段树节点记录
1~2线段部分的X Y值 旋转相对角度的公式推导如下
https://blog.csdn.net/hjq376247328/article/details/45113563
其实也就是
xNew = x * cosB - y * sinB
yNew = x * sinB + y * cosB
再来和 1~2线段的X Y相加即可得到1~5线段的X Y,并将该两子节点的相对角度记录在父节点中
预备知识讲完
2 解答步骤如下
一 建造线段树 build(1,1,n); 由于每条线段都是垂直连接 所以X 均为0 相对角度全部为0
void build(int k,int l,int r) {
angT[k]=x[k]=0.0;
if(r==l) y[k]=L[l];
else {
int lson=k*, rson=k*+;
int m=(l+r)/;
build(lson,l,m);
build(rson,m+,r);
y[k]=y[lson]+y[rson];
}
}
二 某段线段转动角度后
题意输入的角度是si和si+1逆时针角度而不是旋转的角度,而是需要转到的结果角度, 所以我们需要进行转换 。所以使用了pre数组记录每段线段与相邻线段的逆时针间隔角度,这样接收到题意输入角度a后
a-pre[s] 就是实际要转动的角度 而且需要更新pre[s] 以便下次计算
change(s,ang-pre[s],,,n);
pre[s]=ang; // 要求改变为a度 考虑之前已改变过
chang()代码就是批量更新需要转换的角度和X Y
只有旋转的起点线段在当前线段树节点的左子节点 我们才更新当前线段树节点的角度记录
如图
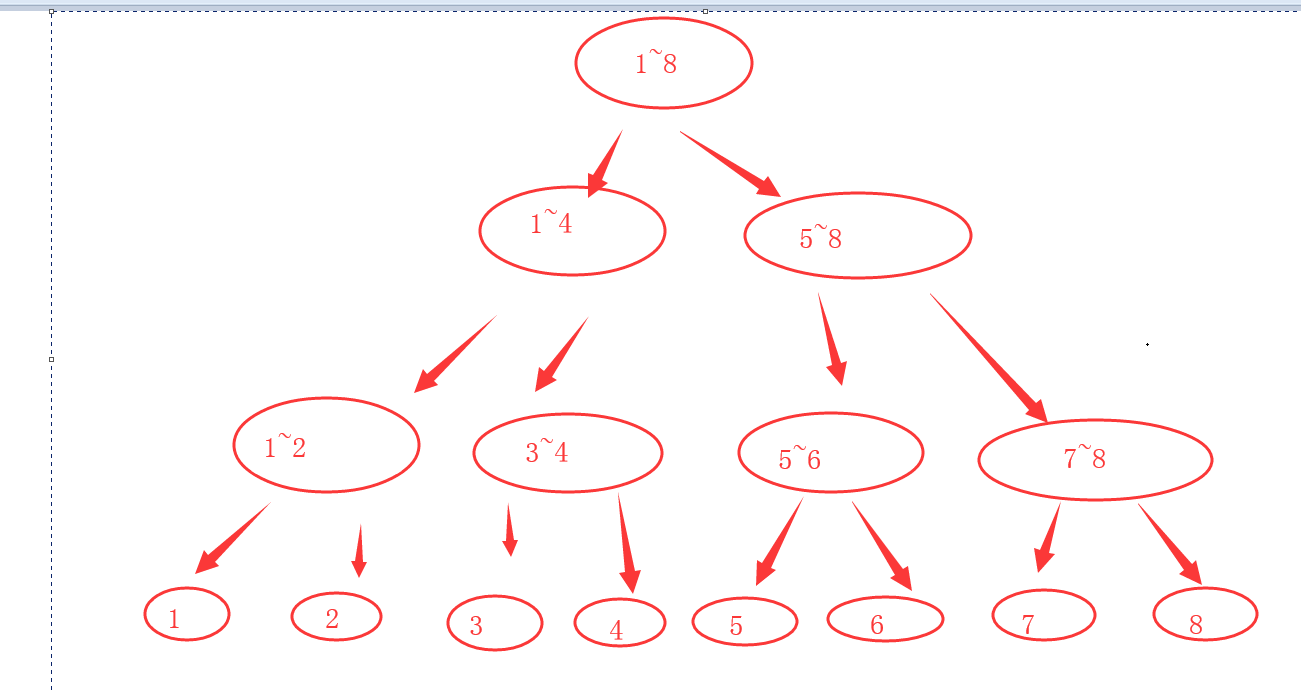
假设节点4 向3旋转90度
那么合并1 2的时候无更新
合并3 4的时候 3~4节点的角度要在原来记录上再旋转90
合并1~2 3~4为1~4的时候无需更新角度 因为 3~4 已经旋转 与1 ~2的相对角度 并没有变化
同样 5~8节点流程中无变化
但是合并1~4 5~8节点的时候 角度需要旋转90
整个流程下来 4 5~8 角度均旋转更新1次 符合题目的集合意义
最后返回1~8节点记录的X Y即可
代码如下
#include <iostream>
#include <vector>
#include <math.h>
#include <stdio.h>
using namespace std;
const double PI = acos(-1.0);
const int N = ; int n, c, L[N];
double pre[N]; double angT[N << ];
double x[N << ], y[N << ]; void build(int k, int l, int r) {
angT[k] = x[k] = 0.0;
if (r == l) y[k] = L[l];
else {
int lson = k * , rson = k * + ;
int m = (l + r) / ;
build(lson, l, m);
build(rson, m + , r);
y[k] = y[lson] + y[rson];
}
} void change(int s, double ang, int k, int l, int r) {
if (s < l || l == r) return; // 操作位置不在范围内 或 区间长度为1 不作处理
else if (s <= r) {
int lson = k * , rson = k * + ;
int m = (l + r) / ;
change(s, ang, lson, l, m);
change(s, ang, rson, m + , r); // 先处理左右子区间
if (s <= m) angT[k] += ang; // 操作位置位于区间的左子区间内 可根据左右子区间的向量更新 double sina = sin(angT[k]), cosa = cos(angT[k]);
x[k] = x[lson] + (x[rson] * cosa - y[rson] * sina);
y[k] = y[lson] + (x[rson] * sina + y[rson] * cosa);
}
} /*
Sample Input 2 1
10 5
1 90 3 2
5 5 5
1 270
2 90
Sample Output 5.00 10.00 -10.00 5.00
-5.00 10.00
*/ int main()
{
while (~scanf("%d%d", &n, &c)) {
for (int i = ; i <= n; i++) {
scanf("%d", &L[i]);
pre[i] = PI;
}
build(, , n);
while (c--) {
int s, a; scanf("%d%d", &s, &a);
double ang = (double)a / 180.0*PI;
change(s, ang - pre[s], , , n);
pre[s] = ang;
printf("%.2f %.2f\n", x[], y[]);
}
printf("\n");
} return ;
}
poj 2991 起重机的更多相关文章
- POJ 2991 Crane(线段树+计算几何)
POJ 2991 Crane 题目链接 题意:给定一个垂直的挖掘机臂.有n段,如今每次操作能够旋转一个位置,把[s, s + 1]专程a度,每次旋转后要输出第n个位置的坐标 思路:线段树.把每一段当成 ...
- AC日记——Crane poj 2991
POJ - 2991 思路: 向量旋转: 代码: #include <cmath> #include <cstdio> #include <cstring> #in ...
- [poj 2991]Crane[线段树表示向量之和,而非数量]
题意: 起重机的机械臂, 由n段组成, 对某一些连接点进行旋转, 询问每次操作后的末端坐标. 思路: 由于旋转会影响到该点之后所有线段的角度, 因此容易想到用线段树记录角度, 成段更新. (但是不是每 ...
- POJ 2991–Crane【线段树+几何】
题意: 把手臂都各自看成一个向量,则机械手的位置正好是手臂向量之和.旋转某个关节,其实就是把关节到机械手之间的手臂向量统统旋转. 由于手臂很多,要每个向量做相同的旋转操作很费时间.这时就可以想到用线段 ...
- 线段树 poj 2991
我们只要把这些向量求和,最终所指的位置就是终点,因此我们只要维护好向量的区间和就可以了.对于第二个问题,我们可以用一个数组degree[i]表示第i个向量和第i-1一个向量当前的夹角,这样就有了当前的 ...
- POJ 2991 Crane
线段树+计算几何,区间更新,区间求和,向量旋转. /* *********************************************** Author :Zhou Zhentao Ema ...
- (中等) POJ 2991 Crane , 几何+线段树。
Description ACM has bought a new crane (crane -- jeřáb) . The crane consists of n segments of variou ...
- Crane (POJ 2991)
//线段树 延迟标签 // #include <bits/stdc++.h> using namespace std; const int maxn=1e4+5; double x[max ...
- POJ 2991 Crane(线段树)
Crane Time Limit: 2000MS Memory Limit: 65536K Total Submissions: 7687 Accepted: 2075 Special J ...
随机推荐
- Theano基础
Theano是python的一个开源库,其解决大量数据问题时性能更好. 首先,给一个关于theano.function的demo: import theano from theano import t ...
- Java 干货之深入理解Java泛型
一般的类和方法,只能使用具体的类型,要么是基本类型,要么是自定义的类.如果要编写可以应用多中类型的代码,这种刻板的限制对代码得束缚会就会很大. ---<Thinking in Java> ...
- Linux 下的 redis安装
官网下载链接:https://redis.io/download redis安装流程,记录自己的实践,分享给需要的人. 1.选择Stable(5.0)下的Download 5.0.0 链接进行下载 ( ...
- 爬虫学习--Requests库详解 Day2
什么是Requests Requests是用python语言编写,基于urllib,采用Apache2 licensed开源协议的HTTP库,它比urllib更加方便,可以节约我们大量的工作,完全满足 ...
- UiPath之DataTable转换为List和Array
今天给大家分享一下,如何将DataTable转为List和Array,为此小U也花了不少时间研究,最后发现没有那么复杂. 先来说说List和Array的区别: List:就像一个链条,存储数据的空间可 ...
- MapReduce任务提交源码分析
为了测试MapReduce提交的详细流程.需要在提交这一步打上断点: F7进入方法: 进入submit方法: 注意这个connect方法,它在连接谁呢?我们知道,Driver是作为客户端存在的,那么客 ...
- js解析json报错Unexpected token i in JSON at position 1
因为后台json是手动拼接的,在拼接时偷了懒,不想转义,所以就用了单引号,结果js解析时悲催了 这里记录一下,被解析的json字符串必须键值对都用双引号包起来,必须是双引号 默默罚抄一百遍
- re模块的基本使用
目录 re模块 常用元字符 特殊构造 贪婪模式 非贪婪模式 re的常用函数 re模块补充 关于re模块必须知道的知识点 re模块 re模块 , 即正则表达式 , 本身是一种小型的.高度专业化的编程语言 ...
- FileStream相关知识分享
一.如何理解FIleStream 通过前3章的学些,相信大家对于Stream已经有一定的了解,但是又如何去理解FileStream呢?请看下图: 我们磁盘中的任何文件都是通过二进制数组组成,最为直观的 ...
- 本地Git连接GitLab(服务器)远程仓库
1.简介 远程仓库是指托管在网络上的项目仓库,现在互联网上有很多项目托管平台,比如github.gitlab等.为了不公开自己项目代码,可以在自己的服务器上搭建自己的项目仓库,最常见的是搭建GitLa ...