GAMES101作业3
作业要求:
作业效果:

我们需要做的:
关键词:法向量;插值计算;光照模型;凹凸贴图;位移映射;
1.在rasterizer.cpp中修改:
void rst::rasterizer::rasterize_triangle(const Triangle& t, const std::array<Eigen::Vector3f, 3>& view_pos)
{
// TODO: From your HW3,
// TODO: Inside your rasterization loop:
// * v[i].w() is the vertex view space depth value z.
// * Z is interpolated view space depth for the current pixel
// * zp is depth between zNear and zFar, used for z-buffer
// float Z = 1.0 / (alpha / v[0].w() + beta / v[1].w() + gamma / v[2].w());
// float zp = alpha * v[0].z() / v[0].w() + beta * v[1].z() / v[1].w() + gamma * v[2].z() / v[2].w();
// zp *= Z;
// TODO: Interpolate the attributes:
// auto interpolated_color
// auto interpolated_normal
// auto interpolated_texcoords
// auto interpolated_shadingcoords
// Use: fragment_shader_payload payload( interpolated_color, interpolated_normal.normalized(), interpolated_texcoords, texture ? &*texture : nullptr);
// Use: payload.view_pos = interpolated_shadingcoords;
// Use: Instead of passing the triangle's color directly to the frame buffer, pass the color to the shaders first to get the final color;
// Use: auto pixel_color = fragment_shader(payload);
auto v = t.toVector4();//把三角形面片的顶点坐标装入容器
int min_x = INT_MAX;
int max_x = INT_MIN;
int min_y = INT_MAX;
int max_y = INT_MIN;
for (auto point : v)
{
if (point[0] < min_x)min_x = point[0];
if (point[0] > max_x)max_x = point[0];
if (point[1] < min_y)min_y = point[1];
if (point[1] > max_y)max_y = point[1];
}
for (int y = min_y; y <= max_y; y++)
{
for (int x = min_x; x <= max_x; x++)
{
if (insideTriangle((float)x + 0.5, (float)y + 0.5, t.v))
{
//得到点的重心坐标
auto abg = computeBarycentric2D((float)x + 0.5, (float)y + 0.5, t.v);
float alpha = std::get<0>(abg);
float beta = std::get<1>(abg);
float gamma = std::get<2>(abg);
//z-buff插值
float w_reciprocal = 1.0 / (alpha / v[0].w() + beta / v[1].w() + gamma / v[2].w());//归一化系数
float z_interpolated = alpha * v[0].z() / v[0].w() + beta * v[1].z() /v[1].w() + gamma * v[2].z() / v[2].w();
z_interpolated *= w_reciprocal;//透视矫正
if (z_interpolated < depth_buf[get_index(x, y)])
{
Eigen::Vector2i p = { (float)x,(float)y };
//颜色插值
auto interpolated_color = interpolate(alpha, beta, gamma, t.color[0], t.color[1], t.color[2], 1);
//法向量插值
auto interpolated_normal = interpolate(alpha, beta, gamma, t.normal[0], t.normal[1], t.normal[2], 1);
//纹理颜色插值
auto interpolated_texcoords = interpolate(alpha, beta, gamma, t.tex_coords[0], t.tex_coords[1], t.tex_coords[2], 1);
//内部点位置插值
auto interpolated_shadingcoords = interpolate(alpha, beta, gamma, view_pos[0], view_pos[1], view_pos[2], 1);
fragment_shader_payload payload(interpolated_color, interpolated_normal.normalized(), interpolated_texcoords, texture ? &*texture : nullptr);
payload.view_pos = interpolated_shadingcoords;
auto pixel_color = fragment_shader(payload);
set_pixel(p, pixel_color);
depth_buf[get_index(x, y)] = z_interpolated;//更新z值
}
}
}
}
}
2.在main.cpp中修改:
分五步:
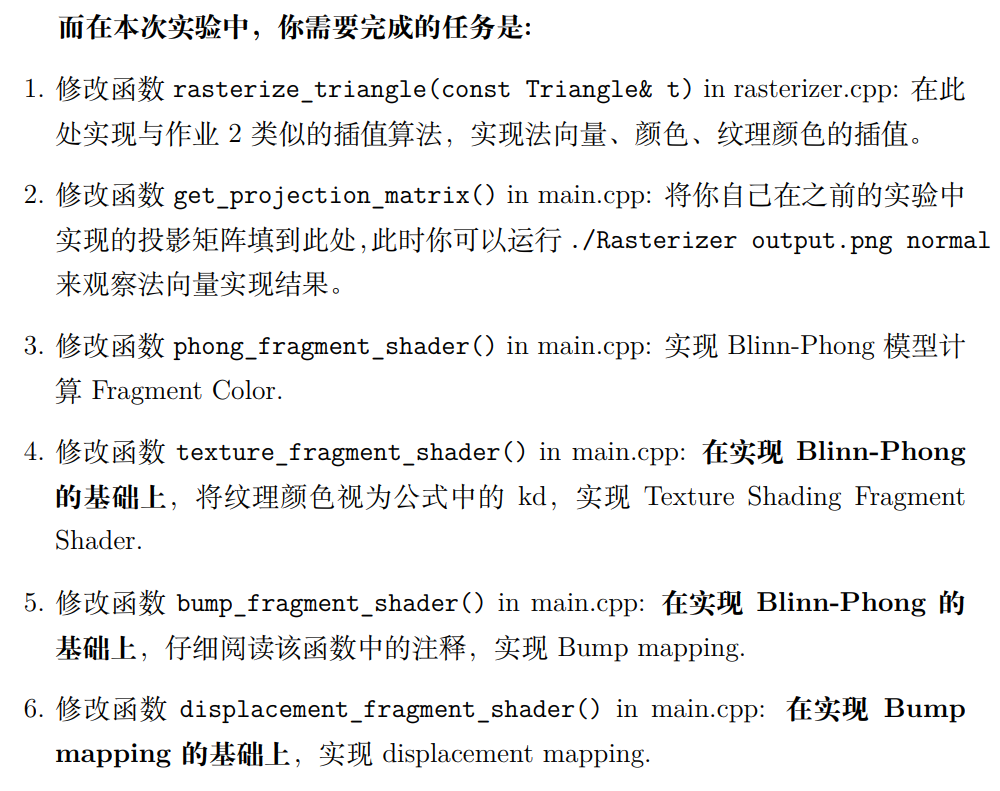
1.函数 get_projection_matrix() :将你自己之前的实验中实现的投影矩阵
此时运行就是法向量的结果——Normal shader.
igen::Matrix4f get_projection_matrix(float eye_fov, float aspect_ratio, float zNear, float zFar)
{
// TODO: Use the same projection matrix from the previous assignments
Eigen::Matrix4f projection = Eigen::Matrix4f::Identity(); //初始化单位矩阵
Eigen::Matrix4f M_trans; //平移变换矩阵
Eigen::Matrix4f M_persp; //透视变换矩阵
Eigen::Matrix4f M_ortho; //正交变换矩阵
M_persp <<
zNear, 0, 0, 0,
0, zNear, 0, 0,
0, 0, zNear + zFar, -zFar * zNear,
0, 0, 1, 0;
float alpha = 0.5 * eye_fov * MY_PI / 180.0f; //角度制转换
float yTop = -zNear * std::tan(alpha); //
float yBottom = -yTop;
float xRight = yTop * aspect_ratio;
float xLeft = -xRight;
M_trans <<
1, 0, 0, -(xLeft + xRight) / 2,
0, 1, 0, -(yTop + yBottom) / 2,
0, 0, 1, -(zNear + zFar) / 2,
0, 0, 0, 1;
M_ortho <<
2 / (xRight - xLeft), 0, 0, 0,
0, 2 / (yTop - yBottom), 0, 0,
0, 0, 2 / (zNear - zFar), 0,
0, 0, 0, 1;
M_ortho = M_ortho * M_trans;
projection = M_ortho * M_persp * projection; //矩阵乘法是从右到左
return projection;
}
//运行normal_fragment_shader
r.set_texture(Texture(Utils::PathFromAsset("model/spot/hmap.jpg")));
std::function<Eigen::Vector3f(fragment_shader_payload)> active_shader = normal_fragment_shader;
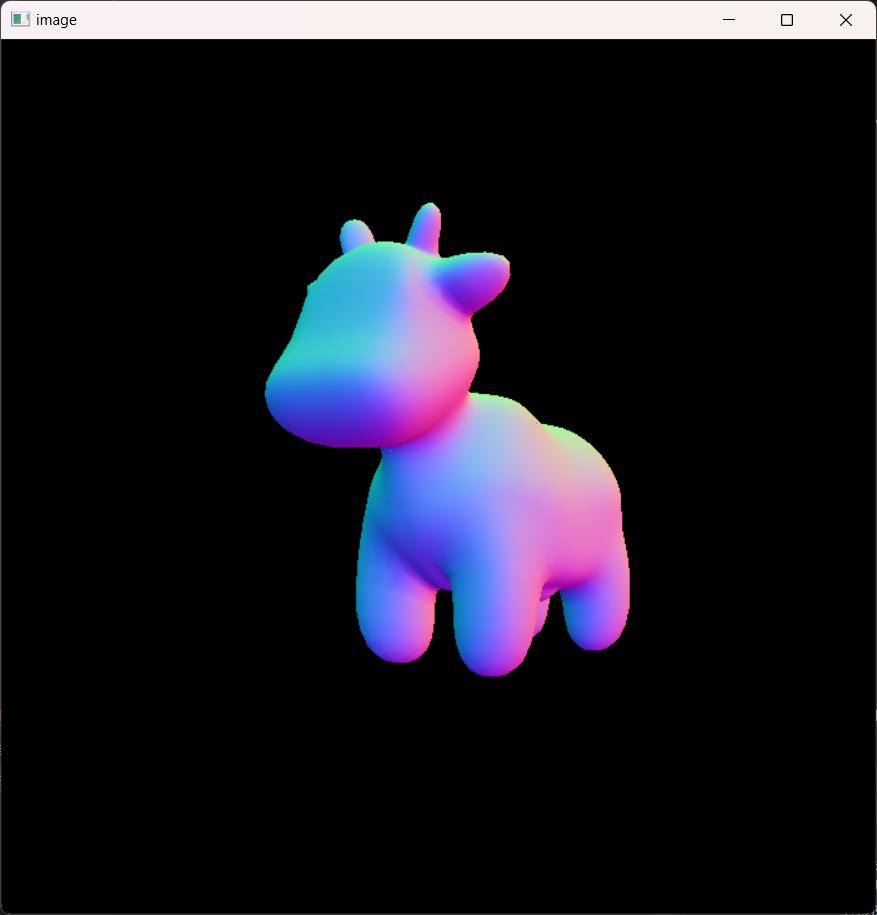
2.函数phong_fragment_shader(): 实现Blinn-Phong模型计算Fragment Color.
igen::Vector3f phong_fragment_shader(const fragment_shader_payload& payload)
{
Eigen::Vector3f ka = Eigen::Vector3f(0.005, 0.005, 0.005); //环境光反射系数
Eigen::Vector3f kd = payload.color; //漫反射系数
Eigen::Vector3f ks = Eigen::Vector3f(0.7937, 0.7937, 0.7937); //镜面反射系数
//定义两个点光源
auto l1 = light{{20, 20, 20}, {500, 500, 500}};
auto l2 = light{{-20, 20, 0}, {500, 500, 500}};
std::vector<light> lights = {l1, l2};
Eigen::Vector3f amb_light_intensity{10, 10, 10}; //环境光的强度
Eigen::Vector3f eye_pos{0, 0, 10};
float p = 150; //高光指数,值越大越集中
Eigen::Vector3f color = payload.color;
Eigen::Vector3f point = payload.view_pos;
Eigen::Vector3f normal = payload.normal;
Eigen::Vector3f result_color = {0, 0, 0};
for (auto& light : lights)
{
// TODO: For each light source in the code, calculate what the *ambient*, *diffuse*, and *specular*
// components are. Then, accumulate that result on the *result_color* object.
auto v = eye_pos - point; //v为出射光方向(指向眼睛)
auto l = light.position - point; //l为指向入射光源方向
auto h = (v + l).normalized(); //h为半程向量,即v+l归一化后的单位向量
auto r = l.dot(l); //衰减因子
//环境光
auto ambient = ka.cwiseProduct(amb_light_intensity);
//漫反射
auto diffuse = kd.cwiseProduct(light.intensity / r) * std::max(0.0f, normal.normalized().dot(l.normalized()));
//镜面反射
auto specular = ks.cwiseProduct(light.intensity / r) * std::pow(std::max(0.0f, normal.normalized().dot(h)), p);
//将光照效果累加
result_color += (ambient + diffuse + specular);
}
return result_color * 255.f;
}
//运行phong_fragment_shader
r.set_texture(Texture(Utils::PathFromAsset("model/spot/hmap.jpg")));
std::function<Eigen::Vector3f(fragment_shader_payload)> active_shader = phong_fragment_shader;
3.函数texture_fragment_shader() :在实现Blinn-Phong模型的基础上,将纹理颜色是为公式中kd,实现Texture shading Fragment Shader.
Eigen::Vector3f texture_fragment_shader(const fragment_shader_payload& payload)
{
Eigen::Vector3f return_color = {0, 0, 0};
if (payload.texture)
{
// TODO: Get the texture value at the texture coordinates of the current fragment
//获取当前片段纹理坐标处的纹理值
return_color = payload.texture->getColor(payload.tex_coords.x(), payload.tex_coords.y());
}
Eigen::Vector3f texture_color;
texture_color << return_color.x(), return_color.y(), return_color.z();
Eigen::Vector3f ka = Eigen::Vector3f(0.005, 0.005, 0.005);
//漫反射系数直接使用纹理颜色(归一化到[0,1]范围)
Eigen::Vector3f kd = texture_color / 255.f;
//镜面反射系数,控制高光的强度和颜色
Eigen::Vector3f ks = Eigen::Vector3f(0.7937, 0.7937, 0.7937);
auto l1 = light{{20, 20, 20}, {500, 500, 500}};
auto l2 = light{{-20, 20, 0}, {500, 500, 500}};
std::vector<light> lights = {l1, l2};
Eigen::Vector3f amb_light_intensity{10, 10, 10};
Eigen::Vector3f eye_pos{0, 0, 10};
float p = 150;
//提取纹理颜色、片段位置、片段法线
Eigen::Vector3f color = texture_color;
Eigen::Vector3f point = payload.view_pos;
Eigen::Vector3f normal = payload.normal;
Eigen::Vector3f result_color = {0, 0, 0};
//Blinn-Phong
for (auto& light : lights)
{
// TODO: For each light source in the code, calculate what the *ambient*, *diffuse*, and *specular*
// components are. Then, accumulate that result on the *result_color* object.
auto v = eye_pos - point; //v为出射光方向(指向眼睛)
auto l = light.position - point; //l为指向入射光源方向
auto h = (v + l).normalized(); //h为半程向量即v+l归一化后的单位向量
auto r = l.dot(l); //衰减因子
auto ambient = ka.cwiseProduct(amb_light_intensity);
//漫反射,使用纹理颜色
auto diffuse = kd.cwiseProduct(light.intensity / r) * std::max(0.0f, normal.normalized().dot(l.normalized()));
auto specular = ks.cwiseProduct(light.intensity / r) * std::pow(std::max(0.0f, normal.normalized().dot(h)), p);
result_color += (ambient + diffuse + specular);
}
//将颜色从[0,1]范围转回[0,255]范围
return result_color * 255.f;
}
//运行texture_fragment_shader时注意要改纹理文件
//纹理文件hmap.jpg改为spot_texture.png
r.set_texture(Texture(Utils::PathFromAsset("model/spot/spot_texture.png")));
std::function<Eigen::Vector3f(fragment_shader_payload)> active_shader = texture_fragment_shader;

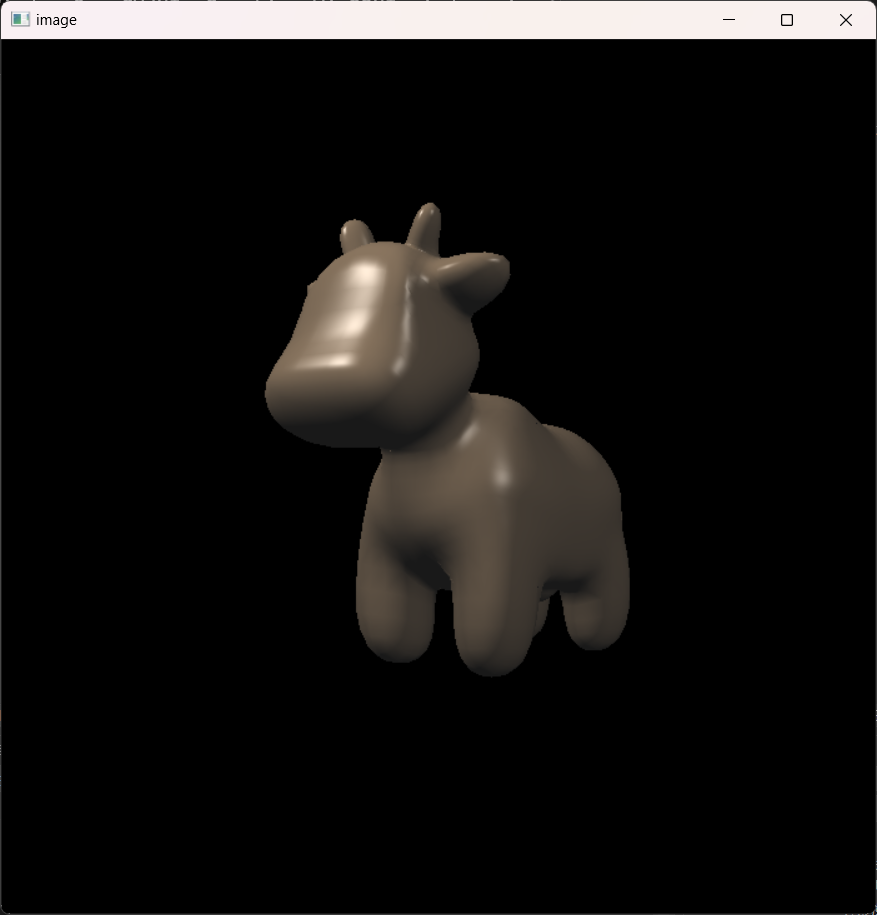
4.函数bump_fragment_shader() :在实现Blinn-Phong模型的基础上,实现凹凸贴图bump fragment shader.
核心原理:法线扰动不改变模型的实际几何形状,而是通过修改表面法线方向来模拟光照变化。当光线照射到这些 “虚拟” 的凹凸表面时,会产生明暗变化,从而欺骗眼睛感知到表面细节。
Eigen::Vector3f bump_fragment_shader(const fragment_shader_payload& payload)
{
Eigen::Vector3f ka = Eigen::Vector3f(0.005, 0.005, 0.005);
Eigen::Vector3f kd = payload.color;
Eigen::Vector3f ks = Eigen::Vector3f(0.7937, 0.7937, 0.7937);
//环境光设置
auto l1 = light{{20, 20, 20}, {500, 500, 500}};
auto l2 = light{{-20, 20, 0}, {500, 500, 500}};
std::vector<light> lights = {l1, l2};
Eigen::Vector3f amb_light_intensity{10, 10, 10};
Eigen::Vector3f eye_pos{0, 0, 10};
float p = 150;
Eigen::Vector3f color = payload.color;
Eigen::Vector3f point = payload.view_pos;
Eigen::Vector3f normal = payload.normal;
//扰动强度参数
//kh:控制高度变化的强度
//kn:控制法线扰动的强度
float kh = 0.2, kn = 0.1;
// TODO: Implement bump mapping here
// Let n = normal = (x, y, z)
// Vector t = (x*y/sqrt(x*x+z*z),sqrt(x*x+z*z),z*y/sqrt(x*x+z*z))
// Vector b = n cross product t
// Matrix TBN = [t b n]
// dU = kh * kn * (h(u+1/w,v)-h(u,v))
// dV = kh * kn * (h(u,v+1/h)-h(u,v))
// Vector ln = (-dU, -dV, 1)
// Normal n = normalize(TBN * ln)
auto x = normal.x();
auto y = normal.y();
auto z = normal.z();
//计算切线向量 t
Eigen::Vector3f t(x * y / sqrt(x * x + z * z), sqrt(x * x + z * z), z * y / sqrt(x * x + z * z));
// 计算副切线向量 b(法线与切线的叉积)
Eigen::Vector3f b = normal.cross(t);
//TBN矩阵: 将纹理坐标对应到模型空间中
Eigen::Matrix3f TBN;
TBN <<
t.x(), b.x(), normal.x(),
t.y(), b.y(), normal.y(),
t.z(), b.z(), normal.z();
auto u = payload.tex_coords.x();
auto v = payload.tex_coords.y();
auto w = payload.texture->width;
auto h = payload.texture->height;
// 计算相邻像素的高度差(使用纹理颜色的范数表示高度)
auto dU = kh * kn * (payload.texture->getColor(u + 1.0f / w, v).norm() - payload.texture->getColor(u, v).norm());
auto dV = kh * kn * (payload.texture->getColor(u, v + 1.0f / h).norm() - payload.texture->getColor(u, v).norm());
// 纹理空间中的扰动法线(Z分量为1,表示向上)
Eigen::Vector3f ln{ -dU,-dV,1.0f };
// 将扰动法线从纹理空间转换到世界空间
normal = TBN * ln;
Eigen::Vector3f result_color = normal.normalized();//归一化
return result_color * 255.f;
}
//运行bump_fragment_shader
//纹理文件记得改回hmap.jpg
r.set_texture(Texture(Utils::PathFromAsset("model/spot/hmap.jpg")));
std::function<Eigen::Vector3f(fragment_shader_payload)> active_shader = bump_fragment_shader;
5.函数displacement_fragment_shader():在实现Blinn-Phong模型的基础上,实现位移映射Displacement fragment shader.
位移映射:与法线扰动不同,位移映射不仅改变表面法线,还实际移动顶点位置,从而创建更真实的凹凸效果,尤其是在边缘和轮廓处。
核心原理:位移映射通过高度图(Height Map)修改顶点位置,使平坦的表面在渲染时看起来像有真实的几何起伏。这需要在着色阶段动态调整顶点位置,并相应地更新法线方向。
Eigen::Vector3f displacement_fragment_shader(const fragment_shader_payload& payload)
{
//光照设置
Eigen::Vector3f ka = Eigen::Vector3f(0.005, 0.005, 0.005);
Eigen::Vector3f kd = payload.color;
Eigen::Vector3f ks = Eigen::Vector3f(0.7937, 0.7937, 0.7937);
auto l1 = light{{20, 20, 20}, {500, 500, 500}};
auto l2 = light{{-20, 20, 0}, {500, 500, 500}};
std::vector<light> lights = {l1, l2};
Eigen::Vector3f amb_light_intensity{10, 10, 10};
Eigen::Vector3f eye_pos{0, 0, 10};
float p = 150;
Eigen::Vector3f color = payload.color;
Eigen::Vector3f point = payload.view_pos; //原始顶点位置
Eigen::Vector3f normal = payload.normal; //原始法线位置
//位移强度参数
float kh = 0.2, kn = 0.1;
// TODO: Implement displacement mapping here
// Let n = normal = (x, y, z)
// Vector t = (x*y/sqrt(x*x+z*z),sqrt(x*x+z*z),z*y/sqrt(x*x+z*z))
// Vector b = n cross product t
// Matrix TBN = [t b n]
// dU = kh * kn * (h(u+1/w,v)-h(u,v))
// dV = kh * kn * (h(u,v+1/h)-h(u,v))
// Vector ln = (-dU, -dV, 1)
// Position p = p + kn * n * h(u,v)
// Normal n = normalize(TBN * ln)
// 计算切线向量 t(沿纹理U方向)
auto x = normal.x();
auto y = normal.y();
auto z = normal.z();
Eigen::Vector3f t(x * y / sqrt(x * x + z * z), sqrt(x * x + z * z), z * y / sqrt(x * x + z * z));
// 计算副切线向量 b(法线与切线的叉积,沿纹理V方向)
Eigen::Vector3f b = normal.cross(t);
// 构建TBN矩阵(将局部坐标转换到世界坐标)
Eigen::Matrix3f TBN;
TBN <<
t.x(), b.x(), normal.x(),
t.y(), b.y(), normal.y(),
t.z(), b.z(), normal.z();
// 获取纹理坐标和尺寸
auto u = payload.tex_coords.x();
auto v = payload.tex_coords.y();
auto w = payload.texture->width;
auto h = payload.texture->height;
// 计算相邻像素的高度差(用于法线计算)
auto dU = kh * kn * (payload.texture->getColor(u + 1.0f / w, v).norm() - payload.texture->getColor(u, v).norm());
auto dV = kh * kn * (payload.texture->getColor(u, v + 1.0f / h).norm() - payload.texture->getColor(u, v).norm());
Eigen::Vector3f ln{ -dU,-dV,1.0f };
// 沿法线方向移动顶点,实现"位移"效果
point += (kn * normal * payload.texture->getColor(u, v).norm());
// 将扰动法线从纹理空间转换到世界空间
normal = TBN * ln;
normal.normalized();
//Phong 光照模型
Eigen::Vector3f result_color = { 0, 0, 0 };
for (auto& light : lights)
{
// TODO: For each light source in the code, calculate what the *ambient*, *diffuse*, and *specular*
// components are. Then, accumulate that result on the *result_color* object.
auto v = eye_pos - point; //v为出射光方向(指向眼睛)
auto l = light.position - point; //l为指向入射光源方向
auto h = (v + l).normalized(); //h为半程向量即v+l归一化后的单位向量
auto r = l.dot(l); //衰减因子
auto ambient = ka.cwiseProduct(amb_light_intensity);
auto diffuse = kd.cwiseProduct(light.intensity / r) * std::max(0.0f, normal.normalized().dot(l.normalized()));
auto specular = ks.cwiseProduct(light.intensity / r) * std::pow(std::max(0.0f, normal.normalized().dot(h)), p);
result_color += (ambient + diffuse + specular);
}
return result_color * 255.f;
}
//运行displacement_fragment_shader
r.set_texture(Texture(Utils::PathFromAsset("model/spot/hmap.jpg")));
std::function<Eigen::Vector3f(fragment_shader_payload)> active_shader = displacement_fragment_shader;
[提高项 3分] :尝试更多模型: 找到其他可用的.obj 文件,提交渲染结果并把模型保存在 /models 目录下。这些模型也应该包含 Vertex Normal 信息。
[提高项 5分]:双线性纹理插值: 使用双线性插值进行纹理采样, 在 Texture类中实现一个新方法 Vector3f getColorBilinear(float u, float v) 并通过 fragment shader 调用它。为了使双线性插值的效果更加明显,你应该考虑选择更小的纹理图。请同时提交纹理插值与双线性纹理插值的结果,并进行比较。
GAMES101作业3的更多相关文章
- GAMES101作业2
作业任务: 填写并调用函数 rasterize_triangle(const Triangle& t). 即实现光栅化 该函数的内部工作流程如下: 创建三角形的 2 维 bounding bo ...
- 【UE4】GAMES101 图形学作业2:光栅化和深度缓存
总览 在上次作业中,虽然我们在屏幕上画出一个线框三角形,但这看起来并不是那么的有趣.所以这一次我们继续推进一步--在屏幕上画出一个实心三角形,换言之,栅格化一个三角形.上一次作业中,在视口变化之后,我 ...
- GAMES101课程 作业6 源代码概览
GAMES101课程 作业6 源代码概览 Written by PiscesAlpaca(双鱼座羊驼) 一.概述 本篇将从main函数为出发点,按照各cpp文件中函数的调用顺序和层级嵌套关系,简单分析 ...
- 【UE4】GAMES101 图形学作业5:光线与物体相交(球、三角面)
总览 在这部分的课程中,我们将专注于使用光线追踪来渲染图像.在光线追踪中最重要的操作之一就是找到光线与物体的交点.一旦找到光线与物体的交点,就可以执行着色并返回像素颜色. 在这次作业中,我们要实现两个 ...
- 【UE4】GAMES101 图形学作业4:贝塞尔曲线
总览 Bézier 曲线是一种用于计算机图形学的参数曲线. 在本次作业中,你需要实现de Casteljau 算法来绘制由4 个控制点表示的Bézier 曲线(当你正确实现该算法时,你可以支持绘制由更 ...
- 【UE4】GAMES101 图形学作业3:Blinn-Phong 模型与着色
总览 在这次编程任务中,我们会进一步模拟现代图形技术.我们在代码中添加了Object Loader(用于加载三维模型), Vertex Shader 与Fragment Shader,并且支持了纹理映 ...
- 【UE4】GAMES101 图形学作业1:mvp 模型、视图、投影变换
总览 到目前为止,我们已经学习了如何使用矩阵变换来排列二维或三维空间中的对象.所以现在是时候通过实现一些简单的变换矩阵来获得一些实际经验了.在接下来的三次作业中,我们将要求你去模拟一个基于CPU 的光 ...
- 【UE4】GAMES101 图形学作业0:矩阵初识
作业描述 给定一个点P=(2,1), 将该点绕原点先逆时针旋转45◦,再平移(1,2), 计算出变换后点的坐标(要求用齐次坐标进行计算). UE4 知识点 主要矩阵 FMatrix FBasisVec ...
- python10作业思路及源码:类Fabric主机管理程序开发(仅供参考)
类Fabric主机管理程序开发 一,作业要求 1, 运行程序列出主机组或者主机列表(已完成) 2,选择指定主机或主机组(已完成) 3,选择主机或主机组传送文件(上传/下载)(已完成) 4,充分使用多线 ...
- SQLServer2005创建定时作业任务
SQLServer定时作业任务:即数据库自动按照定时执行的作业任务,具有周期性不需要人工干预的特点 创建步骤:(使用最高权限的账户登录--sa) 一.启动SQL Server代理(SQL Server ...
随机推荐
- CENTOS 7 使用Docker安装oracle 11g
1.docker第一次安装失败,下一次会提示同名的容器已经存在,解决办法: docker container ls -a 根据上面执行的接口,选择一个containerid,然后带入到下面的命令 do ...
- ORA-01779: 无法修改与非键值保存表对应的列”中涉及的概念和解决方法
什么是键值保存表(Key-Preserved Table)? 在理解什么是键值保存表之前,首先要知道 可更新的联接视图 这个概念,键值保存表只是保存了允许更新的字段信息的一张表.为什么会出现这么一张表 ...
- WPF MessageBox
参考文档 MessageBox MessageBoxButton MessageBoxImage MessageBoxOptions MessageBoxResult
- MYSQL数据库 MariaDB断电恢复总结
背景:本次是机房异常断电,导致数据库文件损坏.在数据库自启动之后频繁宕机,在多次尝试以后,总结了一下几种方法,及供参考. 1.mariadb服务器断电重启之后Missing MLOG_CHECKPOI ...
- DPDI online在线调度系统环境部署
DPDI online简介: DPDI Online 是一款基于Kettle的强大在线任务调度平台,凭借其高效与灵活性,专为调度和监控Kettle客户端生成的ETL任务而设计 DPDI online部 ...
- react项目vite报错:UnhandledPromiseRejectionWarning: SyntaxError: Unexpected token '??='
问题: vite报错:UnhandledPromiseRejectionWarning: SyntaxError: Unexpected token '??=' 今天clone一个vite的项目,安装 ...
- 2025dsfz-KMP学习笔记
KMP 前言:这把高端局 关于KMP 时间复杂度为 \(O(n+m)\) 的优秀字符串查找算法. 适用于在句子/文章中查找一段文字(词语). KMP实现 关于共同前后缀数组(PMT) 说人话就是 \( ...
- firebase studio硬刚cursor,送免费云服务可跑23b大模型
谷歌IDX提供免费高配云服务器(16核CPU,64G内存,300G硬盘),无需绑卡,只需一个能正常使用的谷歌账号.这是一个非常强大的开发环境,特别适合运行大型AI模型和开发工作. 一.Google I ...
- 安装debian12和win11双系统
安装环境:微星主板,AMD CPU 5700G 使用rfues制作分别制作win启动盘(可以在i tell you下载)和debian12(清华源下载较快)启动盘 先安装windows: 主板设置U盘 ...
- 工具 | StarCodeSecurity
0x00 简介 StarCodeSecurity是一款图形化的代码审计工具. 下载地址: StarCodeSecurity下载:StarCodeSecurity下载 0x01 功能说明 支持对规则进行 ...