HDU 1890 Robotic Sort | Splay
Robotic Sort
Time Limit: 6000/2000 MS (Java/Others) Memory Limit: 32768/32768 K (Java/Others)
In this task, you are to write software for a robot that handles samples in such a laboratory. Imagine there are material samples lined up on a running belt. The samples have different heights, which may cause troubles to the next processing unit. To eliminate such troubles, we need to sort the samples by their height into the ascending order.
Reordering is done by a mechanical robot arm, which is able to pick up any number of consecutive samples and turn them round, such that their mutual order is reversed. In other words, one robot operation can reverse the order of samples on positions between A and B.
A possible way to sort the samples is to find the position of the smallest one (P1) and reverse the order between positions 1 and P1, which causes the smallest sample to become first. Then we find the second one on position P and reverse the order between 2 and P2. Then the third sample is located etc.
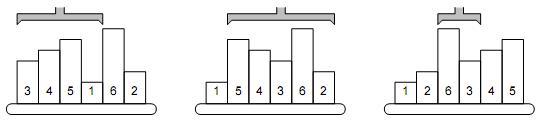 The picture shows a simple example of 6 samples. The smallest one is on the 4th position, therefore, the robot arm reverses the first 4 samples. The second smallest sample is the last one, so the next robot operation will reverse the order of five samples on positions 2–6. The third step will be to reverse the samples 3–4, etc.
The picture shows a simple example of 6 samples. The smallest one is on the 4th position, therefore, the robot arm reverses the first 4 samples. The second smallest sample is the last one, so the next robot operation will reverse the order of five samples on positions 2–6. The third step will be to reverse the samples 3–4, etc. Your task is to find the correct sequence of reversal operations that will sort the samples using the above algorithm. If there are more samples with the same height, their mutual order must be preserved: the one that was given first in the initial order must be placed before the others in the final order too.
The last scenario is followed by a line containing zero.
Note that if a sample is already on its correct position Pi , you should output the number Pi anyway, indicating that the “interval between Pi and Pi ” (a single sample) should be reversed.
【Sample Output】
【题意】
机械臂可以翻转整个数列中连续的某一串序列,要求用这种翻转的方式完成整个数列的排序。
【分析】
排序的方式题目已经给出了,只需要按照要求去模拟即可,而模拟这个过程的方法很重要,时间上还是要求比较严格的。
获取数据之后首先排序一遍,记录下排完序之后每个点原本的位置,这个就是等一下在树中进行操作时需要用到的了。
题目要求的翻转方式是每次刚好将第i个翻转到位,每次翻转之后固定一个数,然后翻转下一个数,直到翻转完全部的数。
只要用splay将每次的目标结点移到根,那么其左子树的大小就是数列中排在它左边的点的个数,也就是题目要求输出的部分。然后翻转整个左子树(将子树的左右儿子交换,递归到底),删除根,就完成了一次操作。
思路很清晰,但是这里遇到的问题是如何翻转左子树,如果每次都手动递归向下翻转所有树的话,时间上必然是要超时的。从线段树中启发,可以用标记的方式标记翻转情况,减少直接操作的次数,用传递标记的方式传下去:
输出结果后,将左子树打上翻转标记,然后删除根。
一个结点翻转标记的传递必须要发生在对其子树进行操作之前,本题中,后续直接操作子树的过程是接下来的删根操作(我的代码中要从左右子树中找前后继)和下一轮将下一个目标移到根的过程。所以要在这两个过程前加入维护的过程。
删根中找前后继因为是从上往下的,刚好可以顺便查看标记情况对子树完成翻转。问题是下一次提升结点到根的时候不能确定上方父节点的标记情况,因此只能从当前结点开始向上查到根,然后从根开始向下回到目标结点,一路查看标记完成翻转维护......这一块我只能想出这个方法了,不知道其他大神有没有什么更好的方法。这里用递归反查结果栈溢出了,只好开了个大数组记录,,,最后提交AC的通过时间也比较长,应该确实是还有更好的方法吧
/* ***********************************************
MYID : Chen Fan
LANG : G++
PROG : HDU1890
************************************************ */ #include <iostream>
#include <cstdio>
#include <cstring>
#include <algorithm> using namespace std; typedef struct nod
{
int key,num;
} node; #define MAXN 100010 node a[MAXN];
int list[MAXN]; bool op(node a,node b)
{
if (a.key==b.key) return a.num<b.num;
else return a.key<b.key;
} int sons[MAXN][];
int father[MAXN],size[MAXN],data[MAXN];
bool flag[MAXN];
int spt=,spttail=; void rotate(int x,int w) //rotate(node,0/1)
{
int y=father[x];
sons[y][-w]=sons[x][w];
if (sons[x][w]) father[sons[x][w]]=y; father[x]=father[y];
if (father[y])
if (y==sons[father[y]][]) sons[father[y]][]=x;
else sons[father[y]][]=x; sons[x][w]=y;
father[y]=x; size[x]=size[y];
size[y]=size[sons[y][]]+size[sons[y][]]+;
} void splay(int x,int y) //splay(node,position)
{
if (!x) return ;
//check(x);
while(father[x]!=y)
{
if (father[father[x]]==y)
if (x==sons[father[x]][]) rotate(x,);
else rotate(x,);
else
if (father[x]==sons[father[father[x]]][])
if (x==sons[father[x]][])
{
rotate(father[x],);
rotate(x,);
} else
{
rotate(x,);
rotate(x,);
}
else
if (x==sons[father[x]][])
{
rotate(father[x],);
rotate(x,);
} else
{
rotate(x,);
rotate(x,);
}
}
if (!y) spt=x;
} void insert(int w) //insert(value)
{
spttail++;
data[spttail]=w;
size[spttail]=;
sons[spttail][]=;
sons[spttail][]=;
flag[spttail]=;
if (!spt)
{
father[spttail]=;
spt=spttail;
} else
{
int x=spt;
while()
{
size[x]++;
if (w<data[x])
if (sons[x][]) x=sons[x][];
else break;
else
if (sons[x][]) x=sons[x][];
else break;
}
father[spttail]=x;
if (w<data[x]) sons[x][]=spttail;
else sons[x][]=spttail;
splay(spttail,);
}
} void down(int x)
{
flag[x]=;
int t=sons[x][];
sons[x][]=sons[x][];
sons[x][]=t;
flag[sons[x][]]=-flag[sons[x][]];
flag[sons[x][]]=-flag[sons[x][]];
} void del(int x) //del(number)
{
splay(x,); int y=sons[x][];
if (flag[y]) down(y);
while(sons[y][])
{
y=sons[y][];
if (flag[y]) down(y);
} int z=sons[x][];
if (flag[z]) down(z);
while(sons[z][])
{
z=sons[z][];
if (flag[z]) down(z);
} if (y)
{
splay(y,);
size[y]--;
if (z)
{
splay(z,y);
sons[z][]=;
size[z]--;
} else sons[y][]=;
} else
{
if (z)
{
splay(z,);
sons[z][]=;
size[z]--;
} else
{
spt=;
spttail=;
}
}
} void check(int x)
{
//if (father[x]) check(father[x]);
//if (flag[x]) down(x);
int i=;
while (father[x])
{
i++;
list[i]=x;
x=father[x];
}
while (i>)
{
if (flag[list[i]]) down(list[i]);
i--;
}
} int main()
{
//freopen("1.txt","r",stdin); int n;
scanf("%d",&n);
while(n)
{
spt=;
spttail=;
for (int i=;i<=n;i++)
{
scanf("%d",&a[i].key);
a[i].num=i;
insert(i);
}
sort(&a[],&a[n+],op); for (int i=;i<=n;i++)
{
check(a[i].num);
splay(a[i].num,);
if (i>) printf(" ");
printf("%d",size[sons[spt][]]+i); flag[sons[spt][]]=-flag[sons[spt][]]; del(spt);
} printf("\n");
scanf("%d",&n);
} return ;
}
HDU 1890 Robotic Sort | Splay的更多相关文章
- hdu 1890 Robotic Sort(splay 区间反转+删点)
题目链接:hdu 1890 Robotic Sort 题意: 给你n个数,每次找到第i小的数的位置,然后输出这个位置,然后将这个位置前面的数翻转一下,然后删除这个数,这样执行n次. 题解: 典型的sp ...
- HDU 1890 - Robotic Sort - [splay][区间反转+删除根节点]
题目链接:http://acm.hdu.edu.cn/showproblem.php?pid=1890 Time Limit: 6000/2000 MS (Java/Others) Memory Li ...
- 数据结构(Splay平衡树):HDU 1890 Robotic Sort
Robotic Sort Time Limit: 6000/2000 MS (Java/Others) Memory Limit: 32768/32768 K (Java/Others)Tota ...
- HDU 1890 Robotic Sort (splay tree)
Robotic Sort Time Limit: 6000/2000 MS (Java/Others) Memory Limit: 32768/32768 K (Java/Others)Tota ...
- HDU 1890 Robotic Sort(splay)
[题目链接] http://acm.hdu.edu.cn/showproblem.php?pid=1890 [题意] 给定一个序列,每次将i..P[i]反转,然后输出P[i],P[i]定义为当前数字i ...
- hdu 1890 Robotic Sort
原题链接:http://acm.hdu.edu.cn/showproblem.php?pid=1890 如下: #include<cstdio> #include<cstdlib&g ...
- hdu 1890 Robotic SortI(splay区间旋转操作)
题目链接:http://acm.hdu.edu.cn/showproblem.php?pid=1890 题解:splay又一高级的功能,区间旋转这个是用线段树这些实现不了的,这题可以学习splay的旋 ...
- HDU1890 Robotic Sort[splay 序列]
Robotic Sort Time Limit: 6000/2000 MS (Java/Others) Memory Limit: 32768/32768 K (Java/Others)Tota ...
- BZOJ 1552: [Cerc2007]robotic sort( splay )
kpm大神说可以用块状链表写...但是我不会...写了个splay.... 先离散化 , 然后splay结点加个min维护最小值 , 就可以了... ( ps BZOJ 3506 题意一样 , 双倍经 ...
随机推荐
- Saltstack 服务器基本安装
Salt介绍 Salt是一个基础平台管理工具 Salt是一个配置管理系统,能够维护预定义状态的远程节点 Salt是一个分布式远程执行系统,用来在远程节点上执行命令和查询数据 Salt核心功能 使命令发 ...
- MyBatis 批量修改记录
<insert id="update" parameterType="java.util.List"> UPDATE setting SET con ...
- 《JavaScript高级程序设计》读书笔记 ---基本类型和引用类型的值
变量.作用域和内存问题 基本类型和引用类型的值ECMAScript 变量可能包含两种不同数据类型的值:基本类型值和引用类型值.基本类型值指的是简单的数据段,而引用类型值指那些可能由多个值构成的对象.在 ...
- HDU1577-WisKey的眼神
Problem Description WisKey的眼镜有500多度,所以眼神不大好,而且他有个习惯,就是走路喜欢看着地(不是为了拣钱哦^_^),所以大家下次碰见他的时候最好主动打下招呼,呵呵.但是 ...
- iOSNSDate的相关操作
//获取当前时间 时间根据格林威治时间显示 //时间 8小时 英国格林威治 7小时 NSDate *date = [NSDate date]; NSLog(@"%@",date ...
- 《C++ Primer》之面向对象编程(一)
面向对象编程基于三个基本概念:数据抽象.继承和动态绑定.//动态绑定使编译器能够在运行时决定是使用基类中定义的函数还是派生类中定义的函数. 面向对象编程的关键思想是多态性(polymorphism). ...
- iOS应用程序内存查看工具
我要找的是一个可以检查应用程序中哪一个数组存贮的什么内容的工具. 网上搜到的工具名称是Allocations Instrument,后来一试发现不是我想要的.这还是一个后期调试阶段的内存检查工具. h ...
- 手机版WEB开发经验分享,手机版网站开发注意事项,网站自适应,手机版网站自适应,移动安卓APP自适应
转自 http://my.oschina.net/cart/blog/282477 做前端开发不短了,用过jQuery Mobile jqMobi 也纯手工写过.. 最后总结如下: jQuery Mo ...
- Android 获取 AudioRecord 麦克风音量大小并做选择性发送
extends:http://blog.csdn.net/alvinhuai/article/details/8955127,http://mikespook.com/2010/11/android- ...
- usb-to-isp-for-stm32