三维网格去噪算法(two-step framework)
基于两步法的网格去噪算法顾名思义包含两个步骤:首先对网格表面的法向进行滤波,得到调整后的网格法向信息,然后根据调整后的法向更新顶点坐标位置,下面介绍三篇该类型的文章。
[Sun et al. 2007]文章首先介绍了当前法向滤波方法以及顶点坐标更新方法,然后提出自己的法向滤波方法和顶点坐标更新方法。
法向滤波方法:
1.均值滤波(mean filter):ni’ = normalize(Σj∈N(i) Aj·nj / Σj∈N(i) Aj),均值滤波会破坏网格的细节特征。
2.中值滤波(median filter):ni’ = arg mediannj {wj⊙∠(ni, nj) : j∈N(i)},中值滤波能够保持网格的细节特征,但当网格噪声较大时,效果并不好。
3.α-截尾滤波(alpha-trimming filter):ni’ = normalize(Σj∈N(i) Iα(j) ·Aj·nj),∠(ni, nj)角度值前α比例和后α比例对应的Iα(j)为0,当α = 0时等同于均值滤波,当α = 0.5时等同于中值滤波。
4.模糊矢量中值滤波(fuzzy vector median filter):先使用矢量中值滤波nm = arg minnj {Σk∈N(i) d(nj, nk) : j∈N(i)},其中d(nj, nk)为nj和nk的Lp范数或∠(nj, nk)角度值,然后再使用高斯滤波ni’ = normalize(Σj∈N(i) nj·exp(-d(nj, nm)2/2σ2))。模糊矢量中值滤波可以得到误差较小的法向,但会增加计算量。
5.[Sun et al. 2007]文章法向滤波方法:ni’ = normalize(Σj∈N(i) hj·nj),权重定义为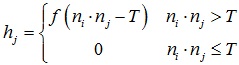 ,其中N(i)为三角片fi的邻域三角片集,有两种选择,见下图,f(x) = x2,0 ≤ T ≤ 1,T的取值决定了邻域三角片N(i)中有多少三角片法向会参与计算,当T = 1时,只有与ni相等的邻域三角片法向会参与计算,而当T = 0时,所有邻域三角片法向都会参与计算。当网格有明显棱边时,T可以取相对较小值,而当网格比较光滑时,T可以取相对较大值。
,其中N(i)为三角片fi的邻域三角片集,有两种选择,见下图,f(x) = x2,0 ≤ T ≤ 1,T的取值决定了邻域三角片N(i)中有多少三角片法向会参与计算,当T = 1时,只有与ni相等的邻域三角片法向会参与计算,而当T = 0时,所有邻域三角片法向都会参与计算。当网格有明显棱边时,T可以取相对较小值,而当网格比较光滑时,T可以取相对较大值。
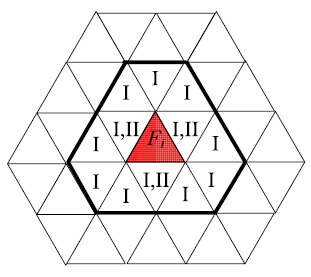
Ⅰ基于顶点(vertex based)的三角片邻域;Ⅱ表示基于边(edge based)的三角片邻域
顶点坐标更新方法:
1.求解线性方程组:
2.梯度下降法:

其中Nv(i)为顶点i的1环邻域顶点集。
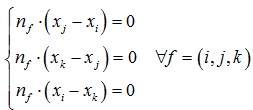
3. [Sun et al. 2007]文章顶点更新方法:

其中Fv(i)为顶点i的1环邻域三角片集。
效果:
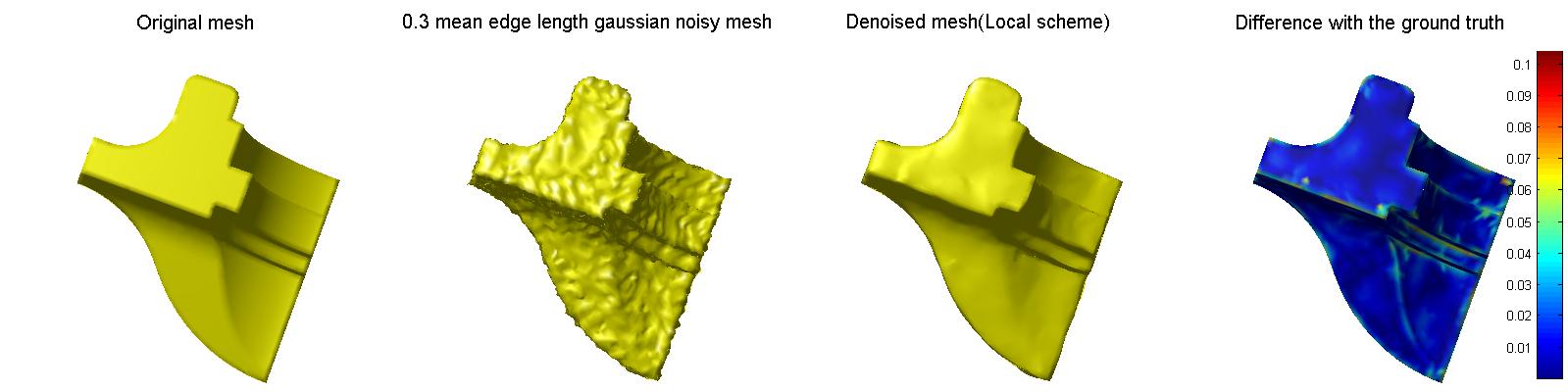
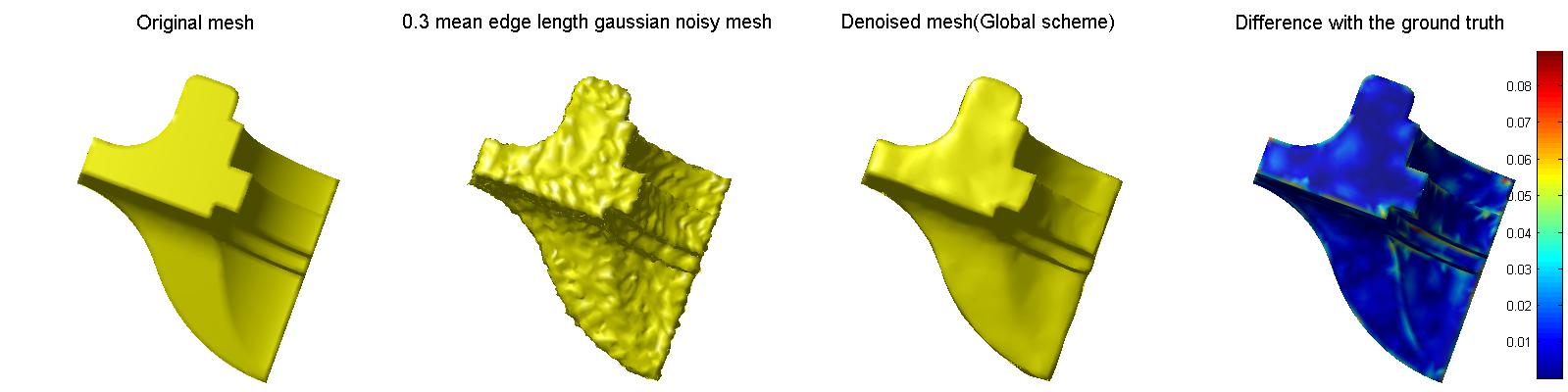
[Zheng et al. 2011]文章提出了两种三角片法向更新方法,而其顶点坐标更新方法采用和[Sun et al. 2007]文章一样的方法。
1.Local and Iterative Scheme:
该方法采用对法向进行双边滤波:nit+1 = Ki·Σj∈N(i) wij·njt,其中N(i)为三角片fi的邻域三角片集,Ki为归一化系数,wij = ξij·Wc·Ws,ξij为三角片fj的面积Si,空间域核Wc(||ci – cj||) = exp(-||ci – cj||2/2σc2),值域核Ws(||ni – nj||) = exp(-||ni – nj||2/2σs2)。
2. Global and Non-Iterative Scheme:
该方法通过求解线性方程组来最小化目标函数,相对于上面的显式更新顶点坐标方法,该方法是一种对应的隐式更新顶点坐标方法,目标函数如下:

其中Ai = Si/mean({S}),上式等同于求解线性方程组,但是方程不满秩,需要加入软约束条件:Ed = Σi Ai·||ni’ – ni||2。最后优化目标为:argmin(1 - λ) ·Es + λ·Ed,其中λ∈[0, 1],用于控制网格的光滑程度。
效果:
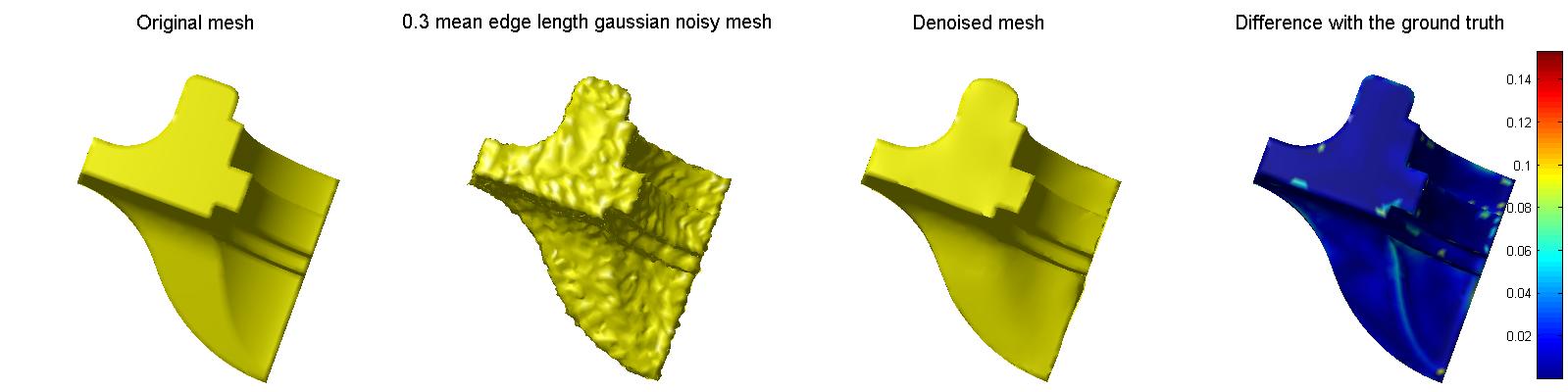
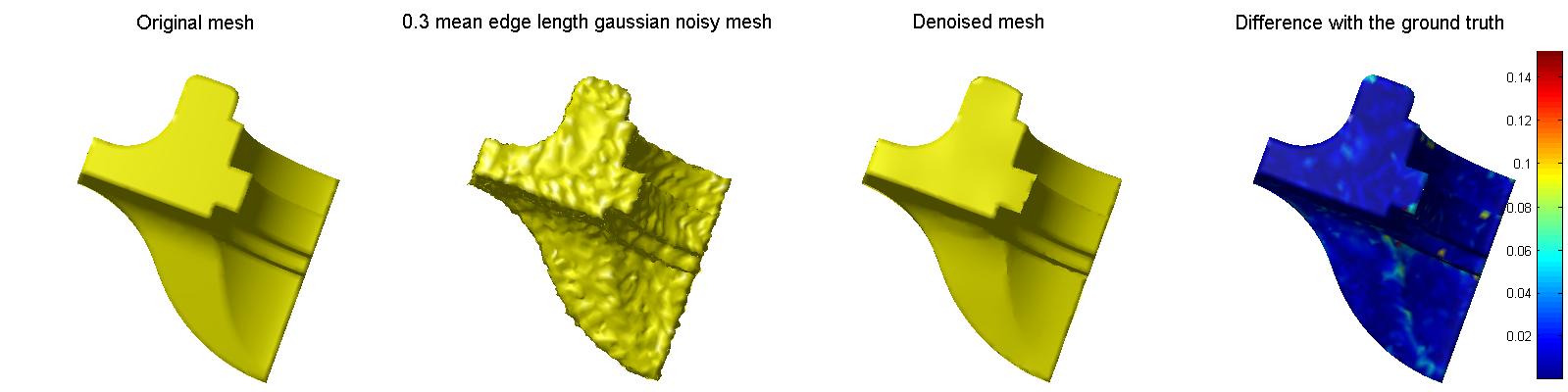
[Zhang et al. 2015]文章提出了一种三角片法向更新方法,该方法与[Zheng et al. 2011]文章的方法一相似,不同的是[Zheng et al. 2011]文章采用原始法向作为双边滤波中的值域信息,而[Zhang et al. 2015]文章对原始法向进行引导滤波(guided filter)得到新的法向作为值域信息。而其顶点坐标更新方法同样采用和[Sun et al. 2007]文章一样的方法。

其中Ni为三角片fi的邻域三角片集,Wi为归一化系数,Aj为三角片fj的面积,空间域核Ks和值域核Kr都为高斯核函数。
关键如何计算三角片fi的引导法向(guidance)gi,文章提出对于三角片fi,在其周围寻找一个包含三角片fi的区域,使该区域内的三角片法向变化最小,然后将这个区域里的所有三角片法向进行加权平均作为三角片fi的引导法向。具体来说,定义Pk为与三角片fi拥有共同顶点的三角片集{fk},那么三角片fi的候选区域(candidate patch)为C(fi) = {Pk∣fi∈Pk}。对于每个区域P∈C(fi),计算区域P内三角片法向的一致性(consistency):H(P) = Ф(P)·R(P),其中Ф(P)为区域P内三角片法向的最大偏差:Ф(P) = maxfj,fk∈P ||nj – nk||,R(P)为区域P内相邻三角片法向的相对变化程度: ,式中φ(ej) = ||nj1 – nj2||。然后选取其中一致性函数H(P)最小的区域P*,并对其中的三角片法向作面积加权平均,即得到三角片fi的引导法向gi:gi = normalize(Σfj∈P* Aj·nj)。
,式中φ(ej) = ||nj1 – nj2||。然后选取其中一致性函数H(P)最小的区域P*,并对其中的三角片法向作面积加权平均,即得到三角片fi的引导法向gi:gi = normalize(Σfj∈P* Aj·nj)。
效果:
本文为原创,转载请注明出处:http://www.cnblogs.com/shushen。
参考文献:
[1] Xianfang Sun; Rosin, P.L.; Martin, R.R.; Langbein, F.C., "Fast and Effective Feature-Preserving Mesh Denoising," Visualization and Computer Graphics, IEEE Transactions, vol.13, no.5, pp.925-938, Sept.-Oct. 2007.
[2] Youyi Zheng; Hongbo Fu; Au, O.K.-C.; Chiew-Lan Tai, "Bilateral Normal Filtering for Mesh Denoising," Visualization and Computer Graphics, IEEE Transactions, vol.17, no.10, pp.1521-1530, Oct. 2011.
[3] Wangyu Zhang, Bailin Deng, Juyong Zhang, Sofien Bouaziz, Ligang Liu, "Guided Mesh Normal Filtering," Computer Graphics Forum (Proc. Pacific Graphics), 34(7): 23–34, 2015.
三维网格去噪算法(two-step framework)的更多相关文章
- 三维网格去噪算法(L0 Minimization)
[He et al. 2013]文章提出了一种基于L0范数最小化的三角网格去噪算法.该思想最初是由[Xu et al. 2011]提出并应用于图像平滑,假设c为图像像素的颜色向量,▽c为颜色向量的梯度 ...
- 三维网格去噪算法(bilateral filter)
受图像双边滤波算法的启发,[Fleishman et al. 2003]和[Jones et al. 2003]分别提出了利用双边滤波算法对噪声网格进行光顺去噪的算法,两篇文章都被收录于当年的SIGG ...
- Vertex-Based Diffusion for 3-D Mesh Denoising(三维网格去噪中基于顶点的扩散算法)
Abstract—We present a vertex-based diffusion for 3-D mesh denoising by solving a nonlinear discrete ...
- Atitit.java图片图像处理attilax总结 BufferedImage extends java.awt.Image获取图像像素点image.getRGB(i, lineIndex); 图片剪辑/AtiPlatf_cms/src/com/attilax/img/imgx.javacutImage图片处理titit 判断判断一张图片是否包含另一张小图片 atitit 图片去噪算法的原理与
Atitit.java图片图像处理attilax总结 BufferedImage extends java.awt.Image 获取图像像素点 image.getRGB(i, lineIndex); ...
- 三维网格形变算法(Linear rotation-invariant coordinates和As-Rigid-As-Possible)
在三维网格形变算法中,个人比较喜欢下面两个算法,算法的效果都比较不错, 不同的是文章[Lipman et al. 2005]算法对控制点平移不太敏感.下面分别介绍这两个算法: 文章[Lipman et ...
- 【算法随记六】一段Matlab版本的Total Variation(TV)去噪算法的C语言翻译。
最近看到一篇文章讲IMAGE DECOMPOSITION,里面提到了将图像分为Texture layer和Structure layer,测试了很多方法,对于那些具有非常强烈纹理的图像,总觉得用TV去 ...
- 三维网格分割算法(Random Walks)
首先以一维随机游走(1D Random Walks)为例来介绍下随机游走(Random Walks)算法,如下图所示,从某点出发,随机向左右移动,向左和向右的概率相同,都为1/2,并且到达0点或N点则 ...
- 基于谱聚类的三维网格分割算法(Spectral Clustering)
谱聚类(Spectral Clustering)是一种广泛使用的数据聚类算法,[Liu et al. 2004]基于谱聚类算法首次提出了一种三维网格分割方法.该方法首先构建一个相似矩阵用于记录网格上相 ...
- 基于模糊聚类和最小割的层次化三维网格分割算法(Hierarchical Mesh Decomposition)
网格分割算法是三维几何处理算法中的重要算法,具有许多实际应用.[Katz et al. 2003]提出了一种新型的层次化网格分割算法,该算法能够将几何模型沿着凹形区域分割成不同的几何部分,并且可以避免 ...
随机推荐
- spring(4)——自动装配
set注入和构造注入有时在做配置时比较麻烦.所以框架为了提高开发效率,提供自动装配功能,简化配置.spring框架式默认不支持自动装配的,要想使用自动装配需要修改spring配置文件中<bean ...
- Dynamics AX7 materials
Dynamics AX community https://community.dynamics.com/ax Dynamics AX Wiki https://ax.help.dynamics.co ...
- 10本Java经典书目推荐
本文列出的10本书是我个人非常喜欢的Java书籍,当我有时间的时候,我就会将它们捧在手里阅读.甚至有些书我反复读过很多遍,每次重新读的时候总会有新的收获.因此这些书也是大部分Java程序员喜欢的书籍. ...
- Activity源码简要分析总结
Activity源码简要分析总结 摘自参考书籍,只列一下结论: 1. Activity的顶层View是DecorView,而我们在onCreate()方法中通过setContentView()设置的V ...
- Android--ListView下拉刷新
整理了下以前写的小项目,ListView的下拉刷新,虽然小但还是想纪念下..适合新手看,大神略过... 效果图: 代码: 实体类 package com.example.listviewre ...
- 【数据库】MySQL的安装与简单使用
首先我们要下载Mysql的安装包,大家可以到http://mysql.com官网中根据自己的电脑系统版本下载 也可以点击 MySQL资源 下载 密码:btuu 建议下载5.7以上的版本,因为省掉了许多 ...
- AES加密解密
AES简介 美国国家标准技术研究所在2001年发布了高级加密标准(AES).AES是一个对称分组密码算法,旨在取代DES成为广泛使用的标准. 根据使用的密码长度,AES最常见的有3种密钥方案,用以适应 ...
- iOS开发之邓白氏编码申请流程
要申请企业证书,必须先申请邓白氏编码,在苹果网站有一个免费申请邓白氏编码的链接:https://developer.apple.com/program/enroll/dunsLookupForm.ac ...
- 【读书笔记】iOS-ASIHTTPRequest框架的使用。
一,安装和配置ASIHTTPRequest框架. 二,同步请求. 在ASIHTTPRequest框架中与HTTP请求相关的类有:ASIHTTPRequest和ASIFormDataRequest,其中 ...
- iOS如何获取网络图片(二)
ios如何获取图片(二)无沙盒下 解决问题 *解决问题1:tableView滑动卡顿,图片延时加载 解决方法:添加异步请求,在子线程里请求网络,在主线程刷新UI *解决问题2:反复请求网络图片,增加用 ...