张高兴的 .NET Core IoT 入门指南:(二)GPIO 的使用
什么是 GPIO
GPIO 是 General Purpose Input Output 的缩写,即“通用输入输出”。 Raspberry Pi 有两列 GPIO 引脚, Raspberry Pi 通过这两行引脚进行一些硬件上的扩展,与传感器进行交互等等。
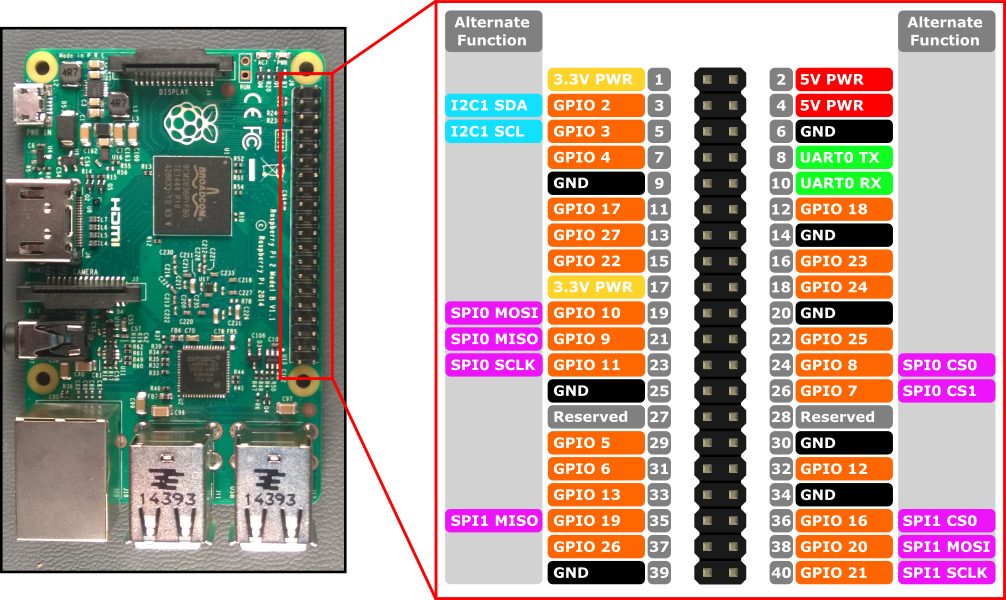
Raspberry Pi B+/2B/3B/3B+/Zero 引脚图
简单的讲,每一个 GPIO 引脚都有两种模式:输出模式(OUTPUT)和输入模式(INPUT)。输出模式类似于一个电源,Raspberry Pi 可以控制这个电源是否向外供电,比如打开外部的 LED 小灯,当然最有用的还是向外部设备发送信号。和输出模式相反,输入模式是接收外部设备发来的信号。其中还包含两种特殊的输入模式:上拉输入(INPUT_PULLUP)和下拉输入(INPUT_PULLDOWN)。上拉输入就是内部的上拉电阻接 VCC ,将该引脚设置为高电平,下拉输入则相反。
GPIO 通常采用标准逻辑电平,即高电平和低电平,用二进制 0 和 1 表示。在这两值中间还有阈值电平,即高电平和低电平之间的界限。Arduino 会将 -0.5 ~ 1.5 V 读取为低电平,3 ~ 5.5 V 读取为高电平, Raspberry Pi 未查到相关资料。GPIO 还可用于中断请求,即设置 GPIO 为输入模式,值达到相应的要求时进行中断。
相关类
此处默认各位是面向对象的程序员,具有一定的 C# 基础,这里只介绍本人认为常用的方法,介绍将以代码注释的形式体现。
GPIO 操作主要依赖于 GpioController 类 。这个类位于 System.Device.Gpio 名称空间下。
GpioController
// GpioController 即 GPIO 控制器
// GPIO 引脚依靠 GpioController 初始化
public class GpioController : IGpioController, IDisposable
{
// 构造函数
public GpioController();
// PinNumberingScheme 即引脚编号方案,是一个枚举类型,包含 Board 和 Logical 两个值。
// 可以看上方的 Raspberry Pi 引脚图,以 GPIO 17 为例,如果实例化时选 Logical ,那么打开引脚时需要填写 17。
// 如果实例化时选 Board ,那么打开引脚时需要填写右侧灰色方框内的值,即 11 。
public GpioController(PinNumberingScheme numbering);
// GpioDriver 用于指定要使用的 GPIO 驱动,比如 libgpiod 或 sysfs
public GpioController(PinNumberingScheme numberingScheme, GpioDriver driver);
// 方法
// 打开 GPIO 引脚
// pinNumber 需要填写和 PinNumberingScheme 相对应的值。
// PinMode 是设置 GPIO 的模式,如输入、输出、上拉、下拉
public void OpenPin(int pinNumber, PinMode mode);
// 关闭 GPIO 引脚
public void ClosePin(int pinNumber);
// 判断某个引脚是否打开
// 注意:引脚连续打开会抛出异常
public bool IsPinOpen(int pinNumber);
// 读取指定引脚的值
public PinValue Read(int pinNumber);
// 向指定的引脚写入值
public void Write(int pinNumber, PinValue value);
// 为指定引脚的值改变时注册回调(即上文中提到的 GPIO 中断)
// PinEventTypes 是值改变的类型,包括上升沿(Rising,0->1)和下降沿(Falling,1->0),注意当设置为 None 时不会触发
// PinChangeEventHandler 为回调事件
public void RegisterCallbackForPinValueChangedEvent(int pinNumber, PinEventTypes eventTypes, PinChangeEventHandler callback);
// 为指定引脚的值改变时注销回调
public void UnregisterCallbackForPinValueChangedEvent(int pinNumber, PinChangeEventHandler callback);
}
人体红外传感器实验
人体红外传感器是基于周围区域的红外热来检测运动的,也称被动红外传感器(Passive Infra-Red, PIR)。这里使用的是 HC-SR501 。当传感器检测到人体时,LED 小灯亮,当传感器未检测到人体时,LED 小灯灭。
传感器图像
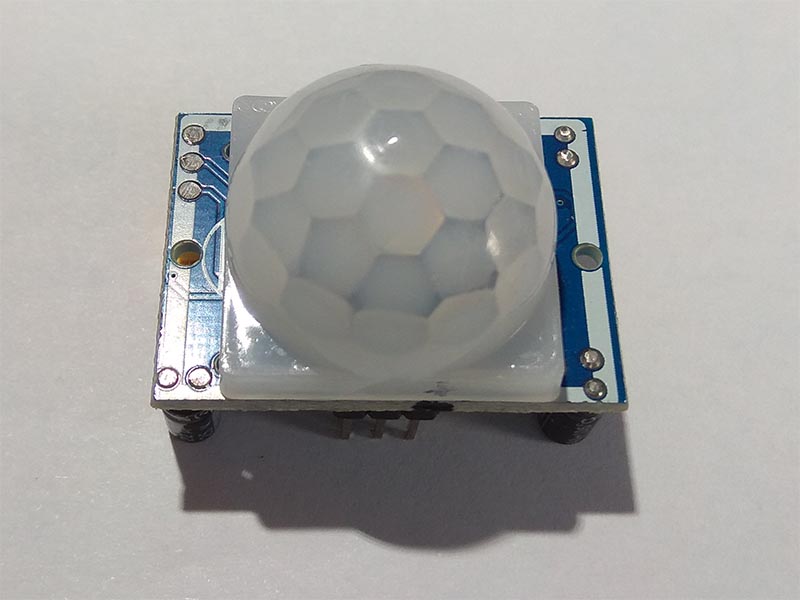
HC-SR501
硬件需求
| 名称 | 数量 |
|---|---|
| HC-SR501 | x1 |
| LED 小灯 | x1 |
| 220 Ω 电阻 | x1 |
| 杜邦线 | 若干 |
电路
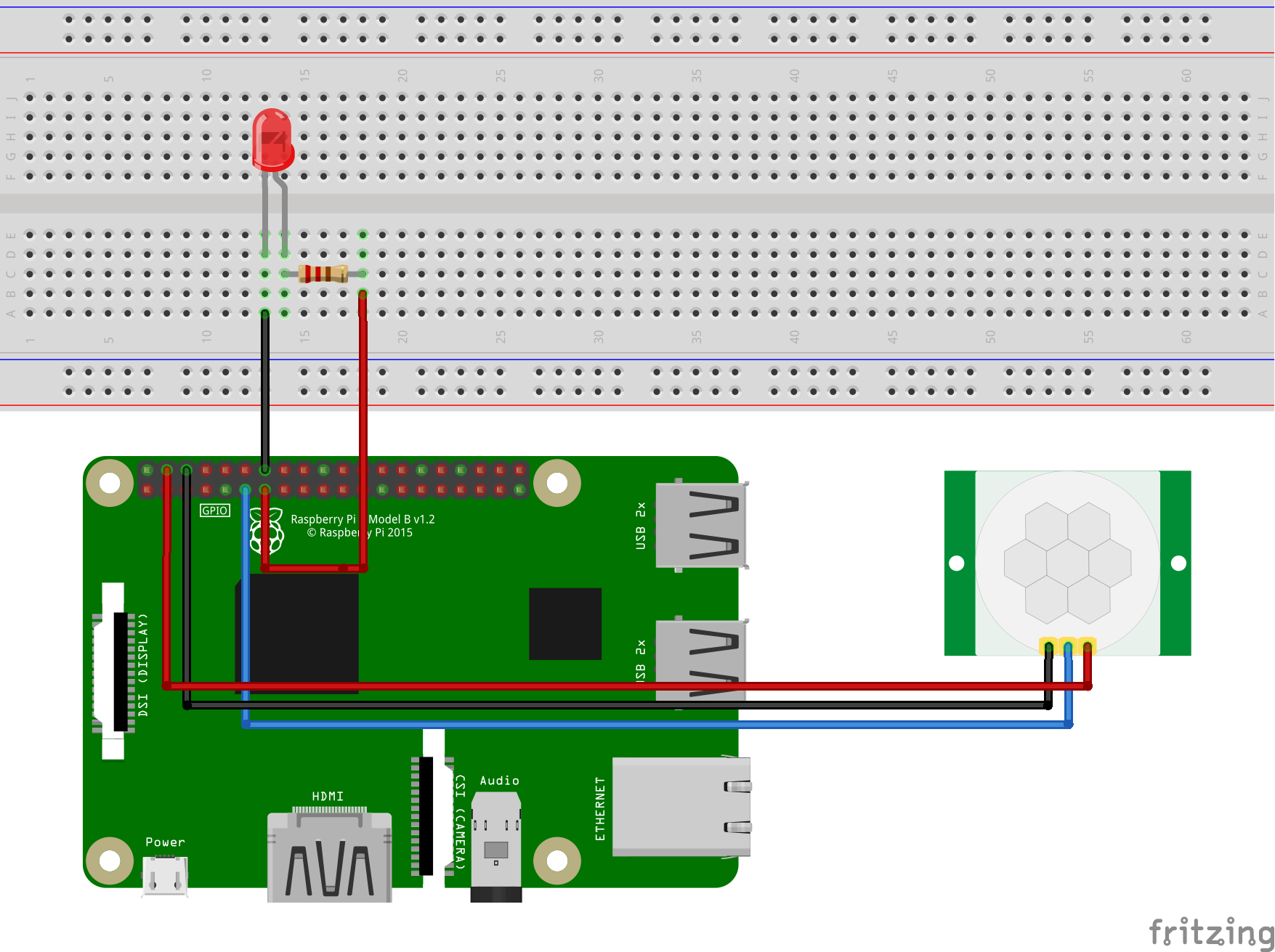
HC-SR501
- VCC - 5V
- GND - GND
- OUT - GPIO 17 (Pin 11)
LED
- VCC & 220 Ω resistor - GPIO 27 (Pin 14)
- GND - GND
使用 Docker 运行示例
示例地址:https://github.com/ZhangGaoxing/dotnet-core-iot-demo/tree/master/src/Hcsr501
docker build -t pir-sample -f Dockerfile .
docker run --rm -it --device /dev/gpiomem pir-sample
代码
打开 Visual Studio ,新建一个 .NET Core 控制台应用程序,项目名称为“PIR”。
引入 System.Device.Gpio NuGet 包。
新建类 Hcsr501,替换如下代码:
public class Hcsr501 : IDisposable
{
private GpioController _controller;
private readonly int _outPin; /// <summary>
/// 构造函数
/// </summary>
/// <param name="pin">OUT Pin</param>
public HCSR501(int outPin, PinNumberingScheme pinNumberingScheme = PinNumberingScheme.Logical)
{
_outPin = outPin; _controller = new GpioController(pinNumberingScheme);
_controller.OpenPin(outPin, PinMode.Input);
} /// <summary>
/// 是否检测到人体
/// </summary>
public bool IsMotionDetected => _controller.Read(_outPin) == PinValue.High; /// <summary>
/// Cleanup
/// </summary>
public void Dispose()
{
_controller?.Dispose();
_controller = null;
}
}
在 Program.cs 中,将主函数代码替换如下:
static void Main(string[] args)
{
// HC-SR501 OUT Pin
int hcsr501Pin = 17;
// LED Pin
int ledPin = 27; // 获取 GPIO 控制器
using GpioController ledController = new GpioController(PinNumberingScheme.Logical);
// 初始化 PIR 传感器
using Hcsr501 sensor = new Hcsr501(hcsr501Pin, PinNumberingScheme.Logical);
// 打开 LED 引脚
ledController.OpenPin(ledPin, PinMode.Output); while (true)
{
// 检测到了人体
if (sensor.IsMotionDetected == true)
{
ledController.Write(ledPin, PinValue.High);
Console.WriteLine("Detected! Turn the LED on.");
}
else
{
ledController.Write(ledPin, PinValue.Low);
Console.WriteLine("Undetected! Turn the LED off.");
} Thread.Sleep(1000);
}
}
发布、拷贝、更改权限、运行
效果图


如何改进?
剔除主函数循环,尝试使用 RegisterCallbackForPinValueChangedEvent() 注册一个回调进行检测。
供参考
- General-purpose input/output - Wikipedia:https://en.wikipedia.org/wiki/General-purpose_input/output
- GPIO - Raspberry Pi Documentation:https://www.raspberrypi.org/documentation/usage/gpio/
- GPIO source code:https://github.com/dotnet/iot/tree/master/src/System.Device.Gpio/System/Device/Gpio
张高兴的 .NET Core IoT 入门指南:(二)GPIO 的使用的更多相关文章
- 张高兴的 .NET Core IoT 入门指南:(一)环境配置、Blink、部署
如何在 Raspberry Pi 的 Raspbian 上构建使用 GPIO 引脚的 IoT 程序?你可能会回答使用 C++ 或 Python 去访问 Raspberry Pi 的引脚.现在,C# 程 ...
- 张高兴的 .NET Core IoT 入门指南:(四)使用 SPI 进行通信
什么是 SPI 和上一篇文章的 I2C 总线一样,SPI(Serial Peripheral Interface,串行外设接口)也是设备与设备间通信方式的一种.SPI 是一种全双工(数据可以两个方向同 ...
- 张高兴的 .NET Core IoT 入门指南:(三)使用 I2C 进行通信
什么是 I2C 总线 I2C 总线(Inter-Integrated Circuit Bus)是设备与设备间通信方式的一种.它是一种串行通信总线,由飞利浦公司在1980年代为了让主板.嵌入式系统或手机 ...
- 张高兴的 .NET Core IoT 入门指南:(五)PWM 信号输出
什么是 PWM 在解释 PWM 之前首先来了解一下电路中信号的概念,其中包括模拟信号和数字信号.模拟信号是一种连续的信号,与连续函数类似,在图形上表现为一条不间断的连续曲线.数字信号为只能取有限个数值 ...
- 张高兴的 .NET Core IoT 入门指南:(五)串口通信入门
在开始之前,首先要说明的是串口通信所用到的 SerialPort 类并不包含在 System.Device.Gpio NuGet 包中,而是在 System.IO.Ports NuGet 包中.之所以 ...
- 张高兴的 .NET IoT 入门指南:(七)制作一个气象站
距离上一篇<张高兴的 .NET Core IoT 入门指南>系列博客的发布已经过去 2 年的时间了,2 年的时间 .NET 版本发生了巨大的变化,.NET Core 也已不复存在,因此本系 ...
- 张高兴的 .NET IoT 入门指南:(八)基于 GPS 的 NTP 时间同步服务器
时间究竟是什么?这既可以是一个哲学问题,也可以是一个物理问题.古人对太阳进行观测,利用太阳的投影发明了日晷,定义了最初的时间.随着科技的发展,天文观测的精度也越来越准确,人们发现地球的自转并不是完全一 ...
- require.js入门指南(二)
*:first-child { margin-top: 0 !important; } body>*:last-child { margin-bottom: 0 !important; } /* ...
- kotlin 语言入门指南(二)--代码风格
语言风格 这里整理了 kotlin 惯用的代码风格,如果你有喜爱的代码风格,可以在 github 上给 kotlin 提 pull request . 创建DTOs(POJSs/POCOs) 文件: ...
随机推荐
- UIKit 框架之UIActionSheet
UIAlertView和UIActionSheet相似,区别很小, 很容易理解. // // ViewController.m // UIActionSheet // // Created by Ci ...
- AngularJS学习笔记(五)自定义指令(1)
先来说说自定义指令 ng通过内置指令的方式实现了对html的增强,同时也赋予了我们自定义指令的功能,让我们根据实际需求进行指令的定制.自定义指令涉及到模板(template).作用域(scope).数 ...
- JS 随机排序算法
https://www.cnblogs.com/getdaydayup/p/6592154.html 使用JS编写一个方法 让数组中的元素每次刷新随机排列 法一: var arr =[1,2,3,4] ...
- 转载ORM--EF框架
EF4.1有三种方式来进行数据操作及持久化.分别是Database-First,Model-First,Code-first: 1.Database First是基于已存在的数据库,利用某些工具(如V ...
- Java虚拟机--线程安全和锁优化
Java虚拟机--线程安全和锁优化 线程安全 线程安全:当多线程访问一个对象时,如果不用考虑这些线程在运行时环境下的调度和交替执行,也不需要额外的同步,或者在调用方进行任何其他的协调操作,调用这个对象 ...
- 了解java虚拟机—垃圾回收算法(5)
引用计数器法(Reference Counting) 引用计数器的实现很简单,对于一个对象A,只要有任何一个对象引用了A,则A的引用计数器就加1,当引用失效时,引用计数器减1.只要对象A的引用计数器的 ...
- if语句格式及流程
if语句是条件判断功能 1. if 条件: if语句块 执行流程:判断条件是否为真. 如果真. 执行if语句块 2. if 条件: if语句块 else: else语句块 执行流程:判断条件是否为真. ...
- 设计模式原则(6)--Open-Closed Principle(OCP)--开闭原则
作者QQ:1095737364 QQ群:123300273 欢迎加入! 1.定义: 一个软件实体应当对扩展开放,对修改关闭.即软件实体应尽量在不修改原有代码的情况下进行扩展. 2.使用场 ...
- HTTPS的安全性
一.Https介绍 1. 什么是Https HTTPS(全称:Hypertext Transfer Protocol over Secure Socket Layer),是以安全为目标的HTTP通道, ...
- js-ES6学习笔记-Proxy(2)
1.has方法用来拦截HasProperty操作,即判断对象是否具有某个属性时,这个方法会生效.典型的操作就是in运算符. var handler = { has (target, key) { if ...