1.ROS启动小乌龟
启动turtlesim
在三个不同的终端中分别执行如下三个指令
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
查看软件包列表和定位软件包 package使用命令
rospack list
找到一个软件包的目录,使用rospack find命令
rospack find package-name
例如:rospack find turtle
查看软件包
rosls package-name
例如:rosls turtlesim
访问软件包roscd package-name
例如:roscd turtlesim/images
节点管理器:ROS的一个基本目标是使机器人专家设计的很多称为节点(node)的几乎相对独立的小程序能够同时运行。为此,这些节点必须能够彼此通信。ROS中实现通信的关键部分就是ROS节点管理器。
启动节点管理器,使用如下命令
roscore

节点管理器应该在使用ROS的全部时间内持续运行(也就是说这个终端运行roscore之后就不要关闭!)。一个合理的工作流程是在一个终端启动roscore,然后打开其他终端运行其他程序。除非你已经完成ROS的相关工作,否则一般没有理由终止roscore命令。当结束时,可以通过在roscore终端键入Ctrl-C停止节点管理器。
节点Nodes:一旦启动了roscore后,就可以运行ros程序了,ros运行程序的实例被称为节点。节点的名字都是唯一的。比如在turtlesim的例子中,我们要启动两个节点,分别为模拟turtle的程序turtlesim以及控制其运动的程序turtle_teleop_key。节点turtle_teleop_key节点的作用是捕捉方向键被按下,然后将按键信息转化为运动指令,然后将指令发送导turtlesim_node节点
启动节点:
rosrun package-name executable-name
第一个参数是功能包的名字,第二个参数是该软件功能包中可执行文件的名称。比如我们要创建一个模拟turtle的节点,一个控制turtle移动的节点,则在两个终端里面分别输入以下命令
终端1:
rosrun turtlesim turtlesim_node

终端2:
rosrun turtlesim turtle_teleop_key
查看节点列表命令:rosnode list
例如:我们在turtlesim的例子中,输入rosnode list后,显示如下结果
/ rosout
/ teleop_turtle
/ turtlesim

(比较rosnode list的输出与rosrun命令中的可执行文件的名称,你会发现二者并不一定相同)
事实上,可以使用rosrun命令显式设置节点的名称,语法如下:
rosrun package-name executable-name __name:=node-name
这种方法将使用node-name参数给出的名称覆盖节点的默认名
其中rosout是一个特殊的节点请注意,通过roscore自动启动,
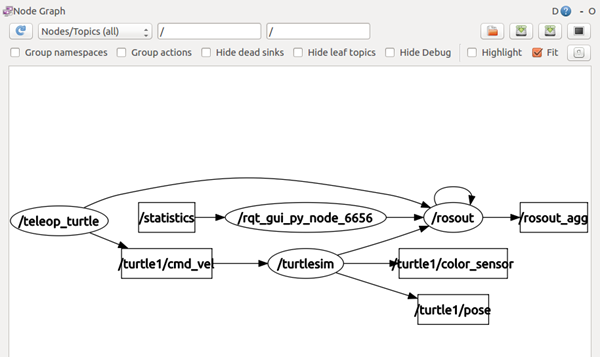
一般除了在终端使用 rosnode list命令查看当前的节点情况外,ROS还提供了一种更加直观的方式来显示ROS节点数,命令为:rqt_graph,然后显示如下节点分布情况。(在默认情况下,rqt_graph隐藏了其认为只在调试过程中使用的节点。你可以通过取消"Hide debug"选项来禁止这个特性)

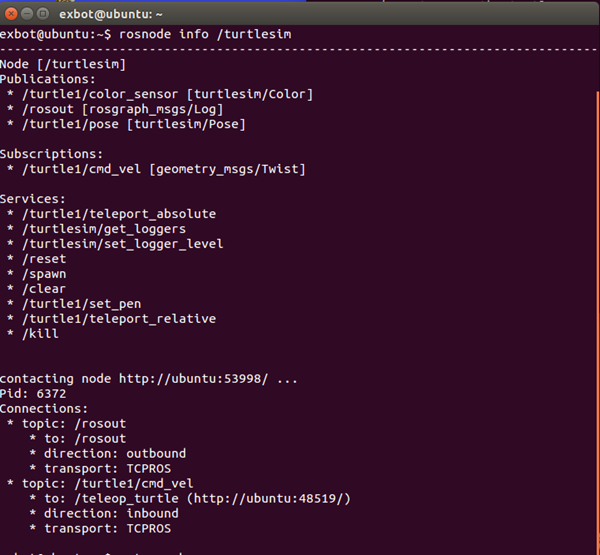
查看节点信息:rosnode info node-name
消息和消息类型
目前为止,我们已经了解了这些节点能相互传递消息,但这些消息里到底包含了什么信息,我们对此还是一无所知。下面,我们将深入探讨话题和消息。
话题列表:
rostopic list
在终端中显示结果为:
/rosout
/rosout_agg
/turtle1/cmd_vel
/turtle1/color_sensor
/turtle1/pose
其实细心的你可以从上面的rqt的图中就可以看的出来,途中方框表示的是topic,刚好是5个,所以这里的List显示的topic 为5个也不足为奇了。
在上面启动的两个节点中,控制节点检测键盘方向按键,然后在turtlesim中的乌龟就会移动,他们之间是以消息传递的,就是通过某个话题发布消息,我们现在打开另外一个终端,输入命令
rostopic echo /turtle1/cmd_vel
看看具体传递的消息是啥?
继续控制乌龟移动,可以发现在终端上的情况

可见消息内容为位移和角度情况。但是为什么数据格式是0.0、2.0等等格式呢,那么我们来具体看看话题的信息,
查看话题信息 rostopic info topic-name
输入:rostopic info /turtle1/cmd_vel
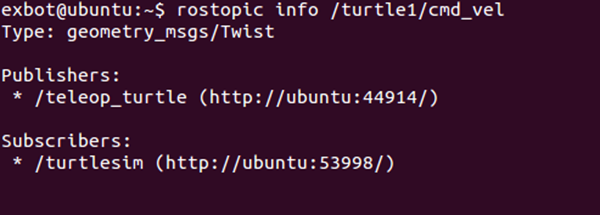
其中指出了Type、Publishers、Subscribers,其中第一个type特别重要,因为它定义了该话题中的消息类型。因此在话题/turtle1/cmd_vel中传送的消息类型为
geometry_msgs/Twist
理解消息的类型很重要,因为它决定了消息的内容。也就是说,一个话题的消息类型能告诉你该话题中每个消息携带了哪些信息,以及这些信息是如何组织的。接下来我们顺藤瓜,去看看消息类型的具体内容——查看消息类型。
查看消息类型:命令为:
rosmsg show message-type-name
对上述的geometry_msgs/Twist尝试如下命令
rosmsg show geometry_msgs/Twist
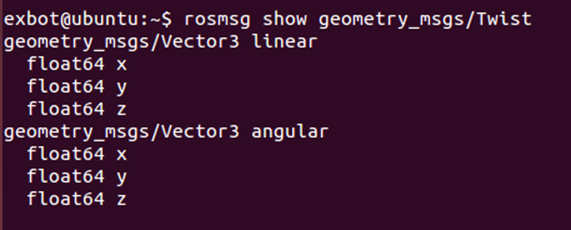
理解消息类型的命名:
和ROS里其他的程序一样,每条消息类型都属于一个特定的包。消息类型名总会包含一个斜杠,斜杠前面的名字是包含它的包:
package-name/type-name
例如:geometry_msgs/Twist消息类型可以按照如下方法分解
geometry_msgs + Twist => geometry_msgs/Twist
1.ROS启动小乌龟的更多相关文章
- [ROS]1 小乌龟
对于一个新新新手,Linux,ROS都要学习.安装ROS真的很讨厌了,于是采用易科机器人实验室的ubuntu12.04-amd64-ros-exbot-h2-140520版本. 测试一下小乌龟节点.主 ...
- ROS启动多launch文件
在ROS工程中经常需要启动好几个launch文件,比较不方便,有下面两种方法可以更高效些: 重写一个大型的launch文件,将所有的节点的启动配置信息都包含进去. 通过bash写一个xxx.sh文件, ...
- Ubuntu14.04+ROS 启动本地摄像头
STEP1安装usb_cam 创建一个工作空间,make一下 mkdir -p ~/catkin_ws/src cd ~/catkin_ws/ catkin_make STEP2下面是安装usb_c ...
- ros启动节点Error: package 'chapter2_tutorials' not found问题
在学习ROS时,实现节点之间的通信时,参考ROS机器人高效编程,每次启动节点的时候 $ rosrun chapter2_tutorials example1_a 都会提示 Error: package ...
- ros 启动launch文件,附带参数
roslaunch cartographer_ros cartographer_ref.launch resolution:=0.07 #下面是cartographer_ref.launch的内容 & ...
- ubuntu16.04 ROS安转及RVIZ启动
1.软件中心配置 首先打开软件和更新对话框,打开后按照下图进行配置(确保你的"restricted", "universe," 和 "multiver ...
- (二)ROS系统架构及概念 ROS Architecture and Concepts 以Kinetic为主更新 附课件PPT
第2章 ROS系统架构及概念 ROS Architecture and Concepts PPT说明: 正文用白色,命令或代码用黄色,右下角为对应中文译著页码. 这一章需要掌握ROS文件系统,运行图级 ...
- ROS indigo 删除和安装
删除比较容易: sudo apt-get remove ros-jade-desktop-full 但是如果怕删不干净可以采用: sudo apt-get remove ros-* ,但是不确定会 ...
- 2017年7月ROS学习资料小结
<孙子兵法·谋攻篇>:"上兵伐谋,其次伐交,其次伐兵,其下攻城:攻城之法为不得已." 任何发生在自己国土上的战争,即便胜利,也饱含屈辱. ----~~~~----Gaz ...
随机推荐
- 2018牛客网暑期ACM多校训练营(第二场)J Farm(树状数组)
题意 n*m的农场有若干种不同种类作物,如果作物接受了不同种类的肥料就会枯萎.现在进行t次施肥,每次对一个矩形区域施某种类的肥料.问最后枯萎的作物是多少. 分析 作者:xseventh链接:https ...
- 045、安装Docker Machine (2019-03-08 周五)
参考https://www.cnblogs.com/CloudMan6/p/7223599.html 前面我们的实验中只有一个docker host ,所有的容器都是运行在这一个host上的.但在 ...
- Python实现工厂模式
from abc import ABCMeta, abstractmethod from enum import Enum class Person(metaclass=ABCMeta): @abst ...
- string.GetHashCode获取值不一样
今天在使用程序时发现两个String.GetHashCode值不一样,通过测试 (1)程序在两台不同的计算机上运行,没有变化. (2)修改32位,64位,值有变化,说明GetHashCode和.net ...
- Windows 操作系统
Microsoft Windows,是美国微软公司研发的一套操作系统,它问世于1985年,起初仅仅是Microsoft-DOS模拟环境,后续的系统版本由于微软不断的更新升级,不但易用,也慢慢的成为家家 ...
- 虚拟机中Linux安装(转)
地址:http://blog.csdn.net/u013142781/article/details/50529030 不是每一个程序员都必须玩过linux,只是博主觉得现在的很多服务器都是linux ...
- 关于mirai的一些研究
关于mirai的一些研究 0x01.源码编译: 配置好对应的go开发环境,即可进行编译,生成了主要的文件 badbot为僵尸节点的可执行文件,cnc为主控端的可执行文件,其它一些为辅助工具. 如下图所 ...
- file_list(path):遍历文件列表[python]
import os def __file_list__(path, level): files = os.listdir(path); for i in files: path_tmp = path ...
- cpp 模版函数
template <typename T> void fillingTable(T ***table, int row, int column, int defaultValue = ST ...
- 迅为IMX6开发板支持全网通4G模块丨GPS模块丨WIFI蓝牙丨千兆以太网
迅为i.MX6开发板丨迅为i.MX6Q开发板丨四核imx6开发板丨Cortec-A9开发板丨资料介绍: 特点: 处理器:Freescale Cortex-A9四核i.MX6Q主频1GHz 核心板配置: ...