树莓派4B-PCA9685驱动舵机
前言
不知道你们有没有遇到过这么一种情况,直接用树莓派的引脚输出PWM控制舵机,舵机是会出现抖动的。就算代码进行一定的时延迟优化还是会有影响的。
现在我们可以使用PCA9685这个模块去驱动舵机。
PCA9685 是一种常用的 PWM(脉冲宽度调制)驱动器芯片,通常用于控制舵机、电机和其他需要精确控制的设备。该芯片可以通过 I2C 总线与微控制器或单片机通信,以实现对多路 PWM 信号的生成和控制。
16 路 PWM 输出:PCA9685 可以同时控制最多 16 路 PWM 输出,每路输出的占空比都可以独立设置,但是16路PWM频率一样。
12 位分辨率:PCA9685 提供了 12 位分辨率的 PWM 输出,可以实现精细的输出控制。
内部振荡器:芯片内部集成了振荡器,可以产生稳定25MHz的时钟信号,无需外部晶振。
可编程频率:可以通过配置寄存器来设置 PWM 输出的频率,范围从 24 Hz 到 1526 Hz。
I2C 接口:使用标准的 I2C 串行总线接口与主控设备通信,方便集成到各种微控制器系统中。
输出驱动能力:每路 PWM 输出都具有较强的驱动能力,可以直接驱动舵机或者其他负载。
接线
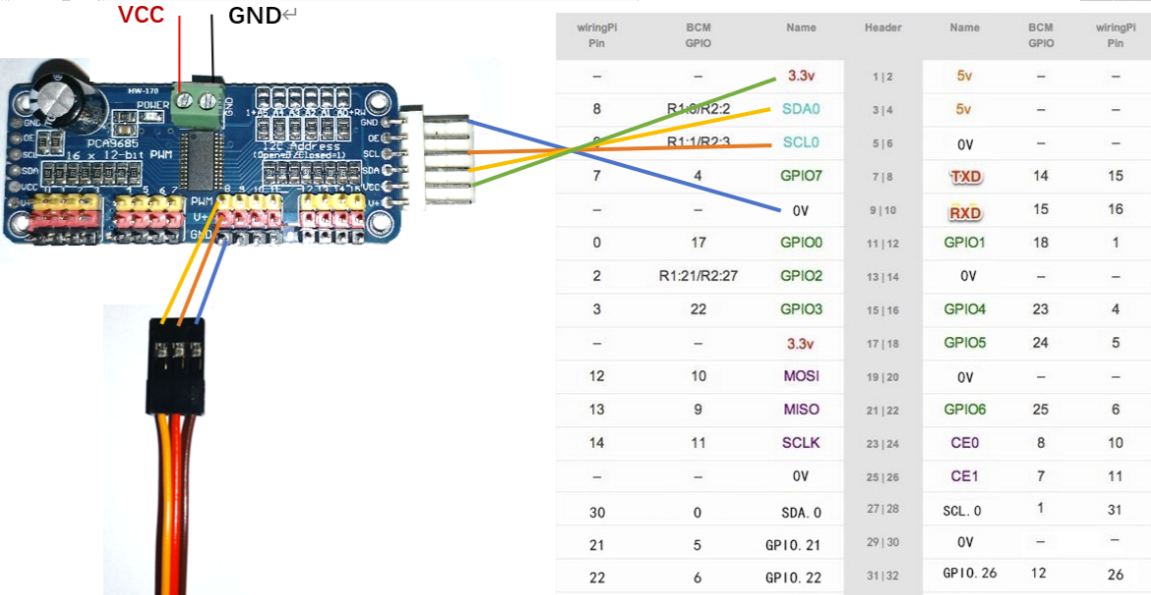
- PCA9685绿端VCC和GND要和电池的正负极相连。
- PCA9685控制端的GND和VCC和树莓派的3.3v(pin1)和GND(pin9)相连。
- PCA9685的SCL和SDA和树莓派的SCL0(pin5)以及SDA0(pin3)相连。
安装PCA9685驱动
在树莓派终端输入:
pip3 install adafruit-circuitpython-pca9685
或者输入:
sudo pip3 install adafruit-circuitpython-pca9685
如果只是想下载虚拟环境到你当前的项目里可以:
mkdir project-name && cd project-name
python3 -m venv .venv
source .venv/bin/activate
pip3 install adafruit-circuitpython-pca9685
安装Motor驱动
在树莓派终端输入:
pip3 install adafruit-circuitpython-motor
或者输入:
sudo pip3 install adafruit-circuitpython-motor
如果只是想下载虚拟环境到你当前的项目里可以:
mkdir project-name && cd project-name
python3 -m venv .venv
source .venv/bin/activate
pip3 install adafruit-circuitpython-motor
测试程序
# SPDX-FileCopyrightText: 2021 ladyada for Adafruit Industries
# SPDX-License-Identifier: MIT
import time
import board
from adafruit_motor import servo
from adafruit_pca9685 import PCA9685
i2c = board.I2C() # uses board.SCL and board.SDA
# i2c = busio.I2C(board.GP1, board.GP0) # Pi Pico RP2040
# Create a simple PCA9685 class instance.
pca = PCA9685(i2c)
# You can optionally provide a finer tuned reference clock speed to improve the accuracy of the
# timing pulses. This calibration will be specific to each board and its environment. See the
# calibration.py example in the PCA9685 driver.
# pca = PCA9685(i2c, reference_clock_speed=25630710)
pca.frequency = 50
# To get the full range of the servo you will likely need to adjust the min_pulse and max_pulse to
# match the stall points of the servo.
# This is an example for the Sub-micro servo: https://www.adafruit.com/product/2201
# servo7 = servo.Servo(pca.channels[7], min_pulse=580, max_pulse=2350)
# This is an example for the Micro Servo - High Powered, High Torque Metal Gear:
# https://www.adafruit.com/product/2307
# servo7 = servo.Servo(pca.channels[7], min_pulse=500, max_pulse=2600)
# This is an example for the Standard servo - TowerPro SG-5010 - 5010:
# https://www.adafruit.com/product/155
# servo7 = servo.Servo(pca.channels[7], min_pulse=400, max_pulse=2400)
# This is an example for the Analog Feedback Servo: https://www.adafruit.com/product/1404
# servo7 = servo.Servo(pca.channels[7], min_pulse=600, max_pulse=2500)
# This is an example for the Micro servo - TowerPro SG-92R: https://www.adafruit.com/product/169
# servo7 = servo.Servo(pca.channels[7], min_pulse=500, max_pulse=2400)
# The pulse range is 750 - 2250 by default. This range typically gives 135 degrees of
# range, but the default is to use 180 degrees. You can specify the expected range if you wish:
# servo7 = servo.Servo(pca.channels[7], actuation_range=135)
servo7 = servo.Servo(pca.channels[0])
# We sleep in the loops to give the servo time to move into position.
for i in range(180):
servo7.angle = i
time.sleep(0.03)
for i in range(180):
servo7.angle = 180 - i
time.sleep(0.03)
# You can also specify the movement fractionally.
fraction = 0.0
while fraction < 1.0:
servo7.fraction = fraction
fraction += 0.01
time.sleep(0.03)
pca.deinit()
参考资料
Introduction — Adafruit motor Library 1.0 documentation (circuitpython.org)
Introduction — Adafruit PCA9685 Library 1.0 documentation (circuitpython.org)
树莓派4B-PCA9685驱动舵机的更多相关文章
- 树莓派4B智能小车机器套件——入手组装实验记录
树莓派4B智能小车机器套件--入手组装实验记录 4WD智能小车(4WD SMART ROBOT KIT),支持Arduino.51.STM32.Raspberry Pi等4个版本.本套件采用的是树莓派 ...
- Linux学习 - 树莓派4b的U-Boot的初识
Linux学习 - 树莓派4b的U-Boot的初识 初识U-Boot 学习书籍:<[正点原子]I.MX6U嵌入式Linux驱动开发指南V1.5.1> 章节:第三十章 学习内容: 书中介绍u ...
- 树莓派4B安装64位Linux(不用显示器键盘鼠标)
入手了树莓派4B,我对它的定位是作为一个Docker实验环境,平时用到的镜像多为Java服务端常用的技术.以及自己作的Java应用镜像,因此宿主机需要64位操作系统,而树莓派官方操作系统只有32位的, ...
- 树莓派4B 安装CentOS
刚入手了一个树莓派4B替换掉旧的3B搭Nas.吐槽下3B的网卡和USB速度真的太慢. 虽然官方推荐的是Debina,由于习惯了CentOS不想增加学习成本,我还是决定用CentOS. 镜像下载地址:h ...
- 树莓派4B安装docker-compose(64位Linux)
准备工作 树莓派4B已装好64位Linux,并且装好了19.03.1版本的Docker,具体的安装步骤请参考<树莓派4B安装64位Linux(不用显示器键盘鼠标)> 安装docker-co ...
- 树莓派(4B)Linux + .Net Core嵌入式-初始化环境(一)
一.树莓派简单介绍 二.软&件准备 硬件:树莓派4B主机.电源线.TF卡&TF读卡器.PC 软件:win32diskimager(用于烧系统到TF卡).Xshell或Windows T ...
- 树莓派(4B)Linux + .Net Core嵌入式-HelloWorld(二)
一.新建.Net Core项目 新建.Net Core3.0的控制台应用,代码如下 namespace Demo { class Program { static void Main(string[] ...
- 读取树莓派4B处理器(CPU)的实时温度
读取树莓派4B处理器(CPU)的实时温度 树莓派发布4B后,性能提升了不少,但是温度也是高的不行,所以最好配置一个小风扇和散热片还是比较好的 俩种办法都可以实现 1.Shell命令读取 打开终端 cd ...
- 树莓派4B到货开箱体验
树莓派4B到货开箱体验 实不相瞒,喜欢这块板已经很久了,但是国内4GB内存的版本始终没货,.....等等等,终于到货了,迅雷不及眼耳之势赶紧下单...购买点亮开发板所需要的物件 顺便看到一个好看的外壳 ...
- 树莓派4B 更新wiringPi库到2.52的方法的wiringPi库2.5.2版本wiringpi-latest.deb下载
树莓派4B 更新wiringPi库到2.52的方法 – 树莓派中文站 http://www.52pi.net/archives/1918 通过如上链接可知,需要通过如下命令下载wiringpi-lat ...
随机推荐
- three.js教程4-Group层级模型
1.组对象Group.层级模型-形成树状结构 //创建两个网格模型mesh1.mesh2 const geometry = new THREE.BoxGeometry(20, 20, 20); con ...
- golang select 和外层的 for 搭配
select语句通常与for循环搭配使用,但并不是必须的. 在某些情况下,select可能会直接放在一个独立的goroutine中,没有外层的for循环. 这通常发生在你知道只会有一次或有限次操作的情 ...
- JDK动态代理的深入理解
引入代理模式 代理模式是框架中经常使用的一种模式,动态代理是AOP(面向切面编程)思想的一种重要的实现方式,在我们常用的框架中也经常遇见代理模式的身影,例如在Spring中事务管理就运用了动态代理,它 ...
- 如何解决 IntelliJ Idea 编译 Java 项目时,找不到包或找不到符号的问题?
执行 Maven Reimport 描述: 重新导入 Maven 包. 操作步骤: -> 选择 Project 目录右键 -> Maven -> Reimport 执行 Invali ...
- WPF 不透明蒙板概述
本文内容 先决条件 使用不透明蒙板创建视觉效果 创建不透明蒙板 将渐变用作不透明蒙板 显示另外 4 个 不透明蒙板能够使部分元素或视觉对象透明或部分透明. 要创建不透明蒙版,请将 Brush 应用于元 ...
- 使用node压缩js
先下载并安装Node 安装完成后打开cmd运行:node -v 运行:npm -v 确定node安装成功,然后安装uglifyjs,打开cmd输入下面命令: npm install uglify-js ...
- iOS11 ReplayKit2 问题总结
一.苹果自6月30日发布iOS11系统之后,其中的Airplay的协议发生变更,导致市场上的苹果直播助手(录屏)大部分变得不可用,因此在iOS11之后需要寻找新的技术方案来录屏 1)采用系统提供的Re ...
- itestwork(爱测试) 开源一站式接口测试&敏捷测试工作站 9.0.2Rc2发布
(一)itest 简介 itest work (爱测试) 一站式工作站让测试变得简单.敏捷,"好用.好看,好敏捷" ,是itest wrok 追求的目标.itest work 包 ...
- k8s——pod生命周期
图解 Pod生命周期 Pod的退出流程 Endpoint删除pod的ip地址 Pod变成Terminating状态 变为删除中的状态后,会给pod一个宽限期,让pod去执行一些清理或销毁操作 配置参数 ...
- .NET周刊【6月第1期 2024-06-02】
国内文章 一文带你了解.NET能做什么? https://www.cnblogs.com/Can-daydayup/p/18214473 .NET是一个免费.开源.跨平台的开发平台框架,广泛应用于桌面 ...