poj 2007 凸包构造和极角排序输出(模板题)
| Time Limit: 1000MS | Memory Limit: 30000K | |
| Total Submissions: 10841 | Accepted: 5085 |
Description
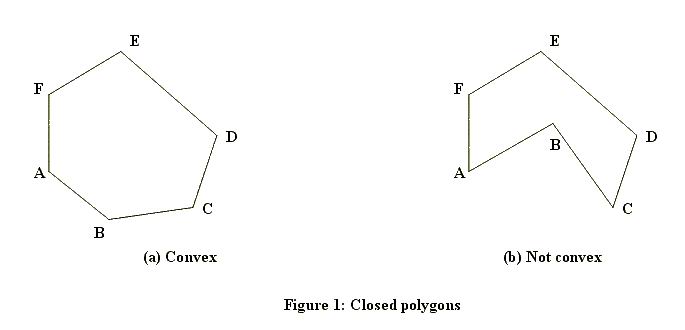
A closed polygon is called convex if the line segment joining any two points of the polygon lies in the polygon. Figure 1 shows a closed polygon which is convex and one which is not convex. (Informally, a closed polygon is convex if its border doesn't have any "dents".)
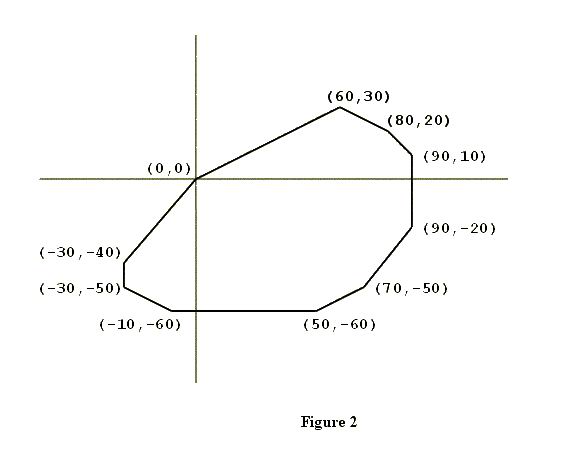
The subject of this problem is a closed convex polygon in the coordinate plane, one of whose vertices is the origin (x = 0, y = 0). Figure 2 shows an example. Such a polygon will have two properties significant for this problem.
The first property is that the vertices of the polygon will be confined to three or fewer of the four quadrants of the coordinate plane. In the example shown in Figure 2, none of the vertices are in the second quadrant (where x < 0, y > 0).
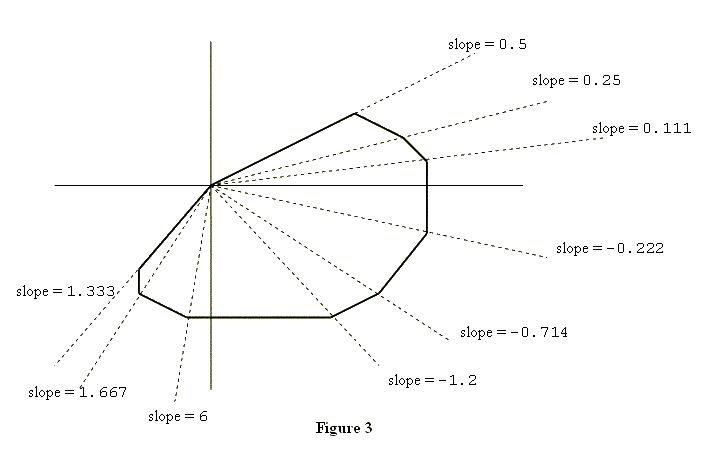
To describe the second property, suppose you "take a trip" around the polygon: start at (0, 0), visit all other vertices exactly once, and arrive at (0, 0). As you visit each vertex (other than (0, 0)), draw the diagonal that connects the current vertex with (0, 0), and calculate the slope of this diagonal. Then, within each quadrant, the slopes of these diagonals will form a decreasing or increasing sequence of numbers, i.e., they will be sorted. Figure 3 illustrates this point.
Input
Output
Sample Input
0 0
70 -50
60 30
-30 -50
80 20
50 -60
90 -20
-30 -40
-10 -60
90 10
Sample Output
(0,0)
(-30,-40)
(-30,-50)
(-10,-60)
(50,-60)
(70,-50)
(90,-20)
(90,10)
(80,20)
(60,30)
#include<iostream>
#include<cmath>
#include<algorithm>
#include<cstdio>
using namespace std; const int MAXN =55;
const double PI= acos(-1.0);
//精度
double eps=1e-8;
//避免出现-0.00情况,可以在最后加eps
//精度比较
int sgn(double x)
{
if(fabs(x)<=eps)return 0;
if(x<0)return -1;
return 1;
} //点的封装
struct Point
{
double x,y;
Point (){}
//赋值
Point (double _x,double _y)
{
x=_x;
y=_y;
}
//点相减
Point operator -(const Point &b)const
{
return Point (x-b.x,y-b.y);
}
//点积
double operator *(const Point &b)const
{
return x*b.x+y*b.y;
}
//叉积
double operator ^(const Point &b)const
{
return x*b.y-y*b.x;
}
} ; //线的封装
struct Line
{
Point s,e;
Line (){}
Line (Point _s,Point _e)
{
s=_s;
e=_e;
}
//平行和重合判断 相交输出交点
//直线相交和重合判断,不是线段,
Point operator &(const Line &b)const{
Point res=b.s;
if(sgn((e-s)^(b.e-b.s))==0)
{
if(sgn((e-s)^(e-b.e))==0)
{
//重合
return Point(0,0);
}
else
{
//平行
return Point(0,0);
}
}
double t=((e-s)^(s-b.s))/((e-s)^(b.e-b.s));
res.x+=(b.e.x-b.s.x)*t;
res.y+=(b.e.y-b.s.y)*t;
return res;
}
}; //向量叉积
double xmult(Point p0,Point p1,Point p2)
{
return (p0-p1)^(p2-p1);
} //线段和线段非严格相交,相交时true
//此处是线段
bool seg_seg(Line l1,Line l2)
{
return sgn(xmult(l1.s,l2.s,l2.e)*xmult(l1.e,l2.s,l2.e))<=0&&sgn(xmult(l2.s,l1.s,l1.e)*xmult(l2.e,l1.s,l1.e))<=0;
} //两点之间的距离
double dist(Point a,Point b)
{
return sqrt((a-b)*(a-b));
} //极角排序;对100个点进行极角排序
int pos;//极点下标
Point p[MAXN];
int Stack[MAXN],top;
bool cmp(Point a,Point b)
{
double tmp=sgn((a-p[pos])^(b-p[pos]));//按照逆时针方向进行排序
if(tmp==0)return dist(a,p[pos])<dist(b,p[pos]);
if(tmp<0)return false ;
return true;
}
void Graham(int n)
{
Point p0;
int k=0;
p0=p[0];
for(int i=1;i<n;i++)//找到最左下边的点
{
if(p0.y>p[i].y||(sgn(p0.y-p[i].y))==0&&p0.x>p[i].x)
{
p0=p[i];
k=i;
}
}
swap(p[k],p[0]);
sort(p+1,p+n,cmp);
if(n==1)
{
top=2;
Stack[0]=0;
return ;
}
if(n==2)
{
top=2;
Stack[0]=0;
Stack[1]=1;
return ;
}
Stack[0]=0;Stack[1]=1;
top=2;
for(int i=2;i<n;i++)
{
while(top>1&&sgn((p[Stack[top-1]]-p[Stack[top-2]])^(p[i]-p[Stack[top-2]]))<=0)
top--;
Stack[top++]=i;
}
} int main ()
{
int t=0;
while(~scanf("%lf%lf",&p[t].x,&p[t].y))
t++;
Graham(t);
for(int i=0;i<t;i++)
{
if(p[i].x==0&&p[i].y==0)
{
swap(p[i],p[0]);
break;
}
}
sort(p,p+t,cmp);
for(int i=0;i<t;i++)
printf("(%.f,%.f)\n",p[i].x,p[i].y);
return 0;
}
极角排序:
根据逆时针顺序进行排序
poj 2007 凸包构造和极角排序输出(模板题)的更多相关文章
- poj 2007 Scrambled Polygon(极角排序)
http://poj.org/problem?id=2007 Time Limit: 1000MS Memory Limit: 30000K Total Submissions: 6701 A ...
- poj 1696:Space Ant(计算几何,凸包变种,极角排序)
Space Ant Time Limit: 1000MS Memory Limit: 10000K Total Submissions: 2876 Accepted: 1839 Descrip ...
- poj 1696 Space Ant (极角排序)
链接:http://poj.org/problem?id=1696 Space Ant Time Limit: 1000MS Memory Limit: 10000K Total Submissi ...
- POJ 1696 Space Ant 【极角排序】
题意:平面上有n个点,一只蚂蚁从最左下角的点出发,只能往逆时针方向走,走过的路线不能交叉,问最多能经过多少个点. 思路:每次都尽量往最外边走,每选取一个点后对剩余的点进行极角排序.(n个点必定能走完, ...
- POJ 1696 Space Ant(极角排序)
Space Ant Time Limit: 1000MS Memory Limit: 10000K Total Submissions: 2489 Accepted: 1567 Descrip ...
- POJ 2280 Amphiphilic Carbon Molecules 极角排序 + 扫描线
从TLE的暴力枚举 到 13313MS的扫描线 再到 1297MS的简化后的扫描线,简直感觉要爽翻啦.然后满怀欣喜的去HDU交了一下,直接又回到了TLE.....泪流满面 虽说HDU的时限是2000 ...
- 【计算几何】【凸包】【极角排序】【二分】Gym - 101128J - Saint John Festival
平面上n个红点,m个黑点,问你多少个黑点至少在一个红三角形内. 对红点求凸包后,转化为询问有多少个黑点在凸包内. 点在凸多边形内部判定,选定一个凸包上的点作原点,对凸包三角剖分,将其他的点极角排序之后 ...
- poj 3683 2-sat建图+拓扑排序输出结果
发现建图的方法各有不同,前面一题连边和这一题连边建图的点就不同,感觉这题的建图方案更好. 题意:给出每个婚礼的2个主持时间,每个婚礼的可能能会冲突,输出方案. 思路:n个婚礼,2*n个点,每组点是对称 ...
- POJ 1981 最大点覆盖问题(极角排序)
Circle and Points Time Limit: 5000MS Memory Limit: 30000K Total Submissions: 8346 Accepted: 2974 ...
随机推荐
- LeetCode485 最大连续1的个数
给定一个二进制数组, 计算其中最大连续1的个数. 示例 1: 输入: [1,1,0,1,1,1] 输出: 3 解释: 开头的两位和最后的三位都是连续1,所以最大连续1的个数是 3. 注意: 输入的数组 ...
- 深入理解nodejs中的异步编程
目录 简介 同步异步和阻塞非阻塞 javascript中的回调 回调函数的错误处理 回调地狱 ES6中的Promise 什么是Promise Promise的特点 Promise的优点 Promise ...
- LeetCode530. 二叉搜索树的最小绝对差
题目 又是常见的BST,要利用BST的性质,即中序遍历是有序递增序列. 法一.中序遍历 1 class Solution { 2 public: 3 vector<int>res; 4 v ...
- Linux下安装配置rocketmq (单个Master、双Master)
一.环境: centos7(2台虚拟机):192.168.64.123:192.168.64.125 apache-maven-3.2.5(官网要求maven版本是3.2.x,版本不同,编译rocke ...
- Vijos-P1103题解【线段树】
本文为原创,转载请注明:http://www.cnblogs.com/kylewilson/ 题目出处: https://www.vijos.org/p/1103 题目描述: 一条马路从数轴0到L,每 ...
- 【MYSQL】DDL语句
介绍:DDL语句,即数据定义语句,定义了不同的数据段,数据库表.表.列.索引等数据库对象:例如,create.drop.alter 适用对象:一般是由数据库管理员DBA使用 1.连接数据库 mysql ...
- 转 Fiddler2 下断点修改HTTP报文
文章转自:https://www.cnblogs.com/zhengna/p/10861893.html 一 Fiddler中设置断点修改HTTP请求 方法1:全局断点.Rules-->Auto ...
- 超精讲-逐例分析 CSAPP:实验2-Bomb!(下)
好了话不多说我们书接上文继续来做第二个实验下面是前半部分实验的连接 5. 第五关 首先感觉应该是个递归问题 /* Round and 'round in memory we go, where we ...
- v-modal的使用。
v-model用于表单数据的双向绑定,其实它就是一个语法糖,这个背后就做了两个操作:v-bind绑定一个value属性:v-on指令给当前元素绑定input事件.
- 详解Go中内存分配
转载请声明出处哦~,本篇文章发布于luozhiyun的博客:https://www.luozhiyun.com 本文使用的go的源码15.7 介绍 Go 语言的内存分配器就借鉴了 TCMalloc 的 ...