Ubuntu14.04+ROS 启动本地摄像头
STEP1安装usb_cam
创建一个工作空间,make一下
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/
catkin_make
STEP2下面是安装usb_cam
cd catkin_ws/src
git clone https://github.com/bosch-ros-pkg/usb_cam usb_cam
cd usb_cam
mkdir build
cd build
cmake ..
make
到这个步骤已经安装好usb_cam了,下面可以测试下是否安装成功。
打开一个新的terminal
roscore
重新打开一个新的terminal,进入~/catkin_ws/src/usb_cam/launch输入下面指令打开摄像头
roslaunch usb_cam-test.launch
(或者使用(推荐使用本方法) roslaunch usb_cam usb_cam-test.launch 如果出现错误,则使用如下方法。
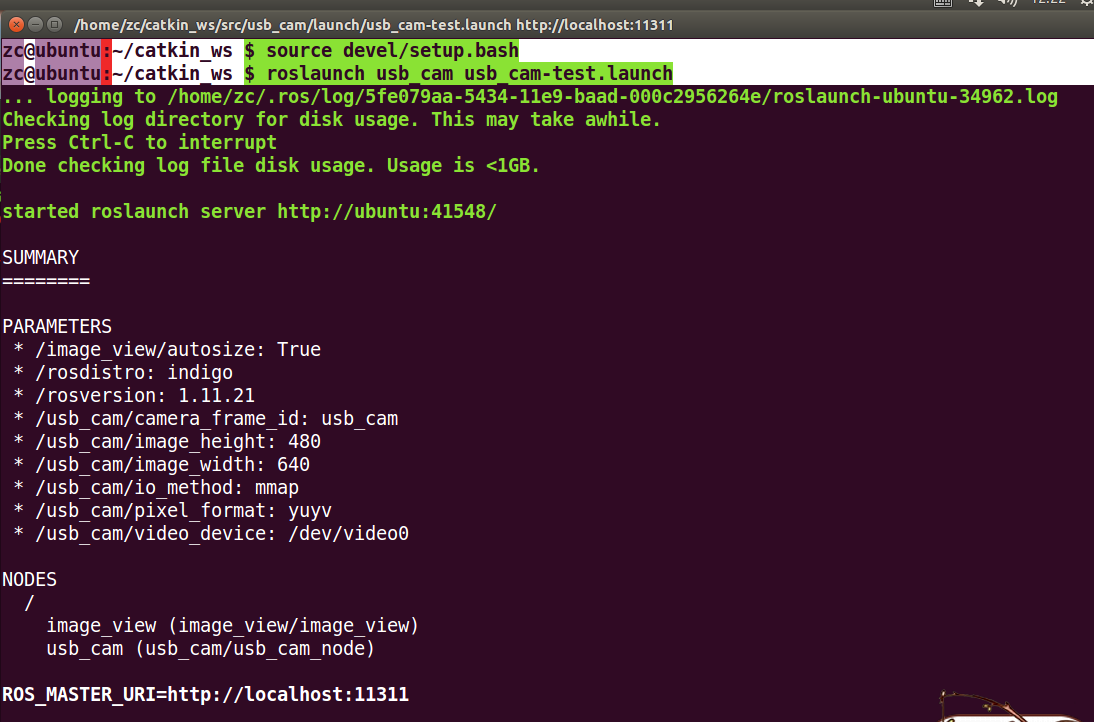
zc@ubuntu:~/catkin_ws $ source devel/setup.bash
zc@ubuntu:~/catkin_ws $ roslaunch usb_cam usb_cam-test.launch
如图:
应该就可以直接启动了,下面的步骤也就不需要了。
)
出现错误:
ERROR: cannot launch node of type [usb_cam/usb_cam_node]: usb_cam
ROS path [0]=/opt/ros/indigo/share/ros
ROS path [1]=/opt/ros/indigo/share
ROS path [2]=/opt/ros/indigo/stacks

新开一个终端运行:
zc@ubuntu:~/catkin_ws $
rosrun usb_cam usb_cam_node
如果出现错误:

那么运行:
zc@ubuntu:~/catkin_ws $
source devel/setup.bash
然后再运行rosrun usb_cam usb_cam_node
然后要显示图像的话,运行:
rosrun image_view image_view image:=/usb_cam/image_raw

Ubuntu14.04+ROS 启动本地摄像头的更多相关文章
- ubuntu14.04修复启动项
自从安装了ubuntu14.04系统后(win7+ubuntu双系统),一直使用grub来引导win7和ubuntu,很长一段时间都使用的很好.突然前两天win7进不去了,无奈之下就用pe修复了win ...
- ubuntu14.04 dnsmasq搭建本地名字服务器
1 修改dnsmasq配置文件/etc/dnsmasq.conf 在/etc/dnsmasq.conf文件底部增加 #++++++++++++++++++++++++++++++++++++++++ ...
- nginx(二)----ubuntu14.04下启动或重启和关闭nginx
/** * lihaibo * 文章内容都是根据自己工作情况实践得出. *如有错误,请指正 *转载请注明出处 */ 一.启动 /usr/local/nginx/sbin/nginx或者cd /usr/ ...
- Ubuntu14.04 使用本地摄像头跑ORB SLAM2(暂未完成)
嗯 这个方法我暂时弄不出来,用了另外一个方法:SLAM14讲 第一次课 使用摄像头或视频运行 ORB-SLAM2 前面的准备: Ubuntu14.04安装 ROS 安装步骤和问题总结 Ubuntu14 ...
- Ubuntu14.04 dd命令克隆系统镜像安装到另一台机器上
linux系统如果想做备份还原,使用ghost的时候经常出现问题,后来发现可以直接使用dd命令完成硬盘的克隆和还原.当拷贝完硬盘后,就可以拿这个硬盘放到其它设备上跑了.也就是完成了“烧写”了. 用U盘 ...
- ubuntu16.04下用笔记本摄像头和ROS编译运行ORB_SLAM2的单目AR例程
要编译ORB_SLAM2的ROS例程首先需要安装ROS,以及在ROS下安装usb_cam驱动并调用,最后搭建ORB_SLAM2. 1.ROS的安装 我的电脑安装的是ubuntu16.04系统,所以我安 ...
- ubuntu14.04 and ros indigo install kinect driver--16
摘要: 原创博客:转载请表明出处:http://www.cnblogs.com/zxouxuewei/ 今日多次测设ros indigo install kinect driver ,提示各种失败,然 ...
- ubuntu14.04中virtualbox虚拟机无法启动
近期升级了ubuntu14.04,还是按之前的方法安装了virtualbox(guest系统仍然使用升级之前的镜像文件),可是在启动guest系统时,总是报错,提演示样例如以下: Kernel dri ...
- Ubuntu14.04安装 ROS 安装步骤和问题总结
参考: 1.http://wiki.ros.org/indigo/Installation/Ubuntu 2.安装出现依赖库问题: https://answers.ros.org/question/3 ...
随机推荐
- Anagram字符串处理(STL真方便啊。。)
题意:给出一些字符串,认为各个字符个数相同的字符串就是相同的,不区分大小写,找出这些字符串中不与其他字符串相同的字符串并挨个输出 用char orgin[][]把每个字符串保存起来,然后对每个字符串都 ...
- 城市扩张实验---ARCGIS处理踩雷
1. 将每个坐标点按照所属泰森多边形分类后,得到了数据统计表,导出到excel里面数据透析. 数据透析行代表泰森多边形编号,列代表地物类别,求和项是frequency.一开始的求和不会显示求和,,而是 ...
- DatePickerAndroid用法
一.代码/** * Sample React Native App * https://github.com/facebook/react-native */ 'use strict'; import ...
- 浅谈jquery事件命名空间
什么是jquery的事件命名空间? 先看如下简单代码: $("#btn").on("click.name1.name2",function(){ console ...
- Oracle数据库:ORA-54013错误解决办法
ORA-54013: 不允许对虚拟列执行 INSERT 操作 这是Oracle 11 的新特性 —— 虚拟列. 在以前的Oracle 版本,当我们需要使用表达式或者一些计算公式时,我们会创建数据库视图 ...
- 12集合(2)-----Set
一.总体分类 Collection(包括方法add,remove,contains,clear,size) List(接口) LinkedList ArrayList Vector---Stack 2 ...
- vscode 最新中文设置
切换中文 首先看商店里有没有chinese language那个中文插件. 在ctrl + shift +p 搜索configure language,然后配置locale如下即可配置中文.
- EasyUI学习(一)——EasyUI入门
EasyUI学习总结(一)——EasyUI入门 一.EasyUI下载 EasyUI官方下载地址:http://www.jeasyui.com/download/index.php,目前最新的版本是:j ...
- 【译著】Code First :使用Entity. Framework编程(5)
第五章 对数据库映射使用默认规则与配置 到目前为止我们已经领略了Code First的默认规则与配置对属性.类间关系的影响.在这两个领域内,Code First不仅影响模型也影响数据库.在这一章,你将 ...
- 窗函数法设计FIR滤波器参数特征表