ROS-1 : Ubuntu16.04中安装ROS Kinetic
1、安装
ROS Kinetic仅支持Wily(Ubuntu 15.10)、Xenial( Ubuntu16.04)和Jessie(Debian 8)的debian软件包。
1.1 配置Ubuntu 库
配置你的Ubuntu库允许“restricted”、“universe”和“multiverse”。可参阅 https://help.ubuntu.com/community/Repositories/Ubuntu 的指令完成上述配置。
1.2 设置sources.list
设置你的计算机接收来自packages.ros.org的软件:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
也可以使用其他镜像:http://wiki.ros.org/ROS/Installation/UbuntuMirrors 和源文件 Debs:http://wiki.ros.org/DebianPackageSources 。
1.3 设置密码
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
如果你在链接到keyserver时遇到问题,你可以在之前的命令中替换hkp://pgp.mit.edu:80 或hkp://keyserver.ubuntu.com:80。
1.4 安装
首先,保证你的Debian软件包索引是最新的:
sudo apt-get update
ROS中由很多不同的库和工具。此处提供四种默认配置来开启你的ROS之旅。你也可以单独安装ROS软件包。
在下一步遇到问题时,你可以使用以下的库代替上述( http://wiki.ros.org/ShadowRepository )提到的一些库。
**Desktop-Full Install : **(推荐)ROS,rqt,rviz,robot-generic libraries,2D/3D simulators,navigation and 2D/3D perception
sudo apt-get install ros-kinetic-desktop-full
**Desktop Install : ** ROS,rqt,rviz and robot-generic libraties
sudo apt-get install ros-kinetic-desktop
**ROS-Base : **(Bare Bones)ROS package build and communication libraries.No GUI tools.
sudo apt-get install ros-kinetic-ros-base
**Individual Package : **你也可以安装一个特定的ROS软件包(在短线后以软件包名代替):
sudo apt-get install ros-kinetic-PACKAGE
例如:
sudo apt-get install ros-kinetic-slam-gmapping
查找可用的软件包,可用:
apt-cache search ros-kinetic
1.5 初始化rosdep
在开始使用ROS前,你需要初始化rosdep。rosdep可保证你轻松地从源头安装你需要编译的系统附属项。在ROS中运行一些核心部分也需要rosdep。
sudo rosdep init
rosdep update
1.6 环境设置
每次打开一个新的shell,将自动地把ROS环境变量添加到你的bash部分,这是非常方便的:
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
如果你安装了多个版本的ROS,~/.bashrc必须仅获取你当前使用的ROS版本的setup.bash。
如果你只想改变你的当前shell的环境变量,你可以使用以下命令,而不是上述命令:
source /opt/ros/kinetic/setup.bash
如果你使用zsh,而不是bash,你需要运行以下命令来设置你的shell:
echo "source /opt/ros/kinetic/setup.zsh" >> ~/.zshrc
source ~/.zshrc
1.7 构建软件包的依赖项
到此为止你已经安装了运行ROS软件包所需的包。为创建和管理你自己的ROS工作空间,有多种多样的工具和单独分布的要求。例如,rosinstall是一个被频繁使用的命令行工具,可方便你使用一条命令轻松从ROS软件包下载很多源文件树。
要安装搭建ROS软件包的该工具和其他依赖项,运行:
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
1.8 搭建farm status
你安装的包由ROS build farm( http://build.ros.org/ )搭建。你可以检测单个包的状态( http://repositories.ros.org/status_page/ros_kinetic_default.html )。
2、测试与教程
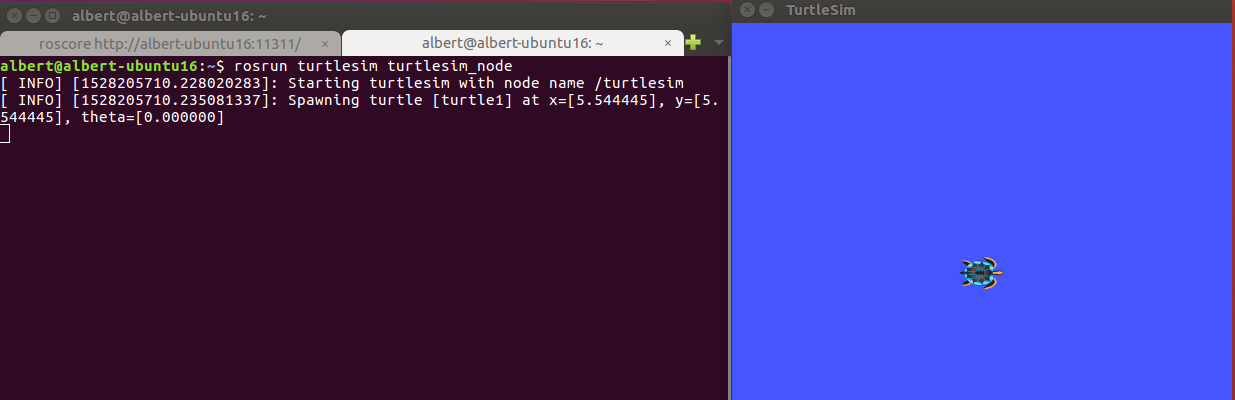
现在,为测试你的安装结果,打开一个终端窗口,输入以下指令:
roscore
在打开一个新终端窗口,输入以下指令:
rosrun turtlesim turtlesim_node
将出现一个小海龟的图形窗口,如下图。至此说明你的ROS安装基本没问题,完全可以正常运行了。
请参考ROS教程( http://wiki.ros.org/ROS/Tutorials )继续学习ROS,开启你的奇幻之旅吧。
ROS-1 : Ubuntu16.04中安装ROS Kinetic的更多相关文章
- SLAM+语音机器人DIY系列:(二)ROS入门——3.在ubuntu16.04中安装ROS kinetic
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- Ubuntu16.04中安装stlink驱动
系统环境: Vmware12, Ubuntu16.04 Stlink version:v1.4.0 一.安装依赖包: sudo apt-get install libusb-1.0 sudo apt- ...
- 如何在Ubuntu16.04 中安装Linux, Nginx, MySQL, PHP (LEMP 栈)
介绍 LEMP 栈是用来开发动态网页和web 应用程序的一系列软件集合,LEMP描述的是Linux操作系统,Nginx web 服务器,以及后端数据存储MySQL/MariaDB数据库和服务器端动态脚 ...
- Docker - 在Ubuntu16.04中安装Docker CE
Get Docker for Ubuntu Check system version root@Ubuntu16:~# uname -a Linux Ubuntu16 4.8.0-36-generic ...
- 在ubuntu16.04中安装apache2+modsecurity以及自定义WAF规则详解
一.Modsecurity规则语法示例 SecRule是ModSecurity主要的指令,用于创建安全规则.其基本语法如下: SecRule VARIABLES OPERATOR [ACTIONS] ...
- Ubuntu16.04中安装搜狗输入法
1.从搜狗输入法官网界面下载安装包 https://pinyin.sogou.com/linux/ 2.安装 sudo dpkg -i sogoupinyin_2.1.0.0082_amd64.deb ...
- Ubuntu16.04中安装VirtualBox及简单配置
sudo apt-get -y install virtualbox 注:将该图表拖到桌面上即可 往下的过程都不变..... 将左边的菜单栏移动到下面 打开一个终端输入:gsettings set c ...
- ubuntu16.04中安装下载工具uget+aria2并配置chrome (stable版)
1.安装uGut sudo apt-get install uget 2.安装aria2 sudo apt-get install arias 3.配置uGet默认下载插件为aria2 菜单栏依次打开 ...
- 在Ubuntu16.04中安装Docker CE
apt-get install apt-transport-https ca-certificates curl software-properties-common curl -fsSL https ...
随机推荐
- 六 Struts2访问Servlet的API方式一:完全解耦合的方式
注意: 完全解耦合的方式,这种方式只能获得代表request.session.application的数据的Map集合. 不能操作这些对象的本身的方法. 1 jsp: <%@ page lang ...
- Linux centosVMware php-fpm的pool、php-fpm慢执行日志、open_basedir
一.php-fpm的pool vim /usr/local/php/etc/php-fpm.conf//在[global]部分增加 include = etc/php-fpm.d/*.conf mkd ...
- 微信小程序表单弹窗实例
开发中有时候会碰到需要一个表单弹窗来处理数据的提交处理,然后这次发布的这套源码就是解决这个问题! <!--button--> <view class="btn" ...
- Django 学习 之 视图层(views)
一个视图函数,简称视图,是一个简单的Python 函数,它接受Web请求并且返回Web响应.响应可以是一张网页的HTML内容,一个重定向,一个404错误,一个XML文档,或者一张图片. . . 是任何 ...
- darknet简述
概述 darknet官网:https://pjreddie.com/darknet/ https://github.com/AlexeyAB/darknet Darknet是一个比较小众的深度学 ...
- 等级保护2.0-mysql
控制点 安全要求 要求解读 测评方法 预期结果或主要证据 身份鉴别 a)应对登录的用户进行身份标识和鉴别,身份标识具有唯一性,身份鉴别信息具有复杂度要求并定期更换 应检查MySQL数据库的口令策略配置 ...
- Memcached 最新版本发布,不再仅仅是个内存缓存了
导读 Memcached 1.5.18和之后版本可以在服务重启时恢复内存缓存.新版本还通过DAX文件系统挂载来实现缓存持久性功能. 可以通过在启动选项使用该功能: -e /tmpfs_mount/me ...
- Vue 集成easyUI
原 Vue 集成easyUI https://blog.csdn.net/m0_37948170/article/details/84960320 参考vue官网用cli创建了Vue项目之后: n ...
- 【C++】【STL】【map】基础知识干货
1.map简介 map是一种关联式容器,主要用于对数据一对一的映射. 2.map的构造 (1)头文件:#include<map> (2)定义:map<第一关键字,第二关键字> ...
- JDBC--PreparedStatement使用
1. PreparedStatement是Statement的子接口,可以传入传入带有占位符的SQL语句,并且提供了相应的方法来替换占位符(setXxx(int index, Object value ...