POJ 2007 Scrambled Polygon [凸包 极角排序]
| Time Limit: 1000MS | Memory Limit: 30000K | |
| Total Submissions: 8636 | Accepted: 4105 |
Description
A closed polygon is called convex if the line segment joining any two points of the polygon lies in the polygon. Figure 1 shows a closed polygon which is convex and one which is not convex. (Informally, a closed polygon is convex if its border doesn't have any "dents".) 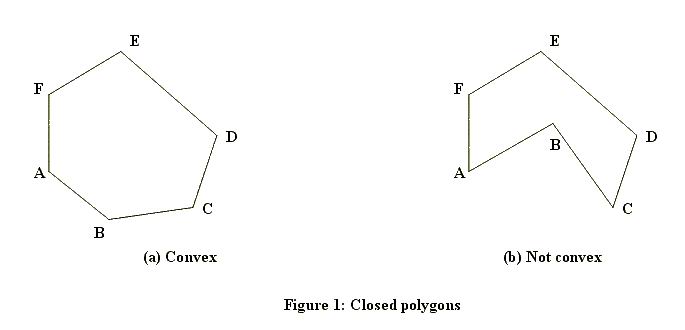
The subject of this problem is a closed convex polygon in the coordinate plane, one of whose vertices is the origin (x = 0, y = 0). Figure 2 shows an example. Such a polygon will have two properties significant for this problem.
The first property is that the vertices of the polygon will be confined to three or fewer of the four quadrants of the coordinate plane. In the example shown in Figure 2, none of the vertices are in the second quadrant (where x < 0, y > 0).
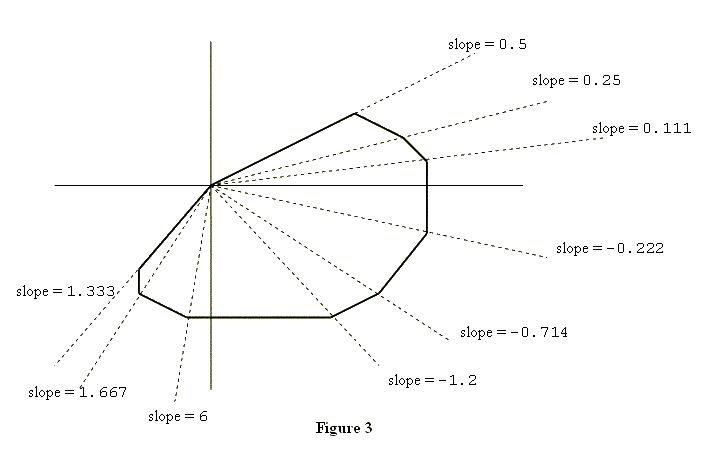
To describe the second property, suppose you "take a trip" around the polygon: start at (0, 0), visit all other vertices exactly once, and arrive at (0, 0). As you visit each vertex (other than (0, 0)), draw the diagonal that connects the current vertex with (0, 0), and calculate the slope of this diagonal. Then, within each quadrant, the slopes of these diagonals will form a decreasing or increasing sequence of numbers, i.e., they will be sorted. Figure 3 illustrates this point. 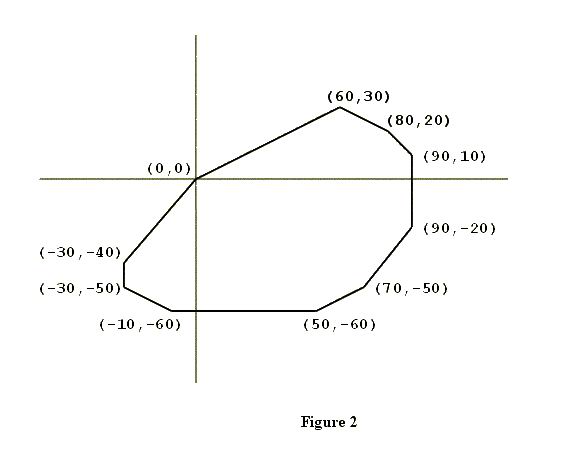
Input
Output
Sample Input
0 0
70 -50
60 30
-30 -50
80 20
50 -60
90 -20
-30 -40
-10 -60
90 10
Sample Output
(0,0)
(-30,-40)
(-30,-50)
(-10,-60)
(50,-60)
(70,-50)
(90,-20)
(90,10)
(80,20)
(60,30)
Source
显然极角排序 用叉积 但WA好多次最后发现必须要保证第一个点在开始,排序直接跳过就行了
#include <iostream>
#include <cstdio>
#include <cstring>
#include <algorithm>
#include <cmath>
using namespace std;
typedef long long ll;
const int N=;
const double eps=1e-; inline int read(){
char c=getchar();int x=,f=;
while(c<''||c>''){if(c=='-')f=-; c=getchar();}
while(c>=''&&c<=''){x=x*+c-''; c=getchar();}
return x*f;
} inline int sgn(double x){
if(abs(x)<eps) return ;
else return x<?-:;
} struct Vector{
double x,y;
Vector(double a=,double b=):x(a),y(b){}
};
typedef Vector Point;
double Dot(Vector a,Vector b){return a.x*b.x+a.y*b.y;}
double Cross(Vector a,Vector b){return a.x*b.y-a.y*b.x;} int n,x,y;
Point p[N],S;
bool cmpPolar(Point a,Point b){
return sgn(Cross(a,b))>;
}
int main(int argc, const char * argv[]) {
while(scanf("%d",&x)!=EOF){
y=read();
p[++n]=Point(x,y);
}
sort(p+,p++n,cmpPolar);
for(int i=;i<=n;i++) printf("(%.0f,%.0f)\n",p[i].x,p[i].y);
return ;
}
#include <iostream>
#include <cstdio>
#include <cstring>
#include <algorithm>
#include <cmath>
#include <vector>
using namespace std;
typedef long long ll;
const int N=;
const double eps=1e-;
const double pi=acos(-); inline int read(){
char c=getchar();int x=,f=;
while(c<''||c>''){if(c=='-')f=-; c=getchar();}
while(c>=''&&c<=''){x=x*+c-''; c=getchar();}
return x*f;
} inline int sgn(double x){
if(abs(x)<eps) return ;
else return x<?-:;
} struct Vector{
double x,y;
Vector(double a=,double b=):x(a),y(b){}
bool operator <(const Vector &a)const{
//return x<a.x||(x==a.x&&y<a.y);
return sgn(x-a.x)<||(sgn(x-a.x)==&&sgn(y-a.y)<);
}
};
typedef Vector Point;
Vector operator +(Vector a,Vector b){return Vector(a.x+b.x,a.y+b.y);}
Vector operator -(Vector a,Vector b){return Vector(a.x-b.x,a.y-b.y);}
Vector operator *(Vector a,double b){return Vector(a.x*b,a.y*b);}
Vector operator /(Vector a,double b){return Vector(a.x/b,a.y/b);}
bool operator ==(Vector a,Vector b){return sgn(a.x-b.x)==&&sgn(a.y-b.y)==;} double Dot(Vector a,Vector b){return a.x*b.x+a.y*b.y;}
double Cross(Vector a,Vector b){return a.x*b.y-a.y*b.x;}
double DisPP(Point a,Point b){
Point t=b-a;
return sqrt(t.x*t.x+t.y*t.y);
}
int ConvexHull(Point p[],int n,Point ch[]){//cannot handle repeat point
sort(p+,p++n);
int m=;
for(int i=;i<=n;i++){
while(m>&&sgn(Cross(ch[m]-ch[m-],p[i]-ch[m-]))<=) m--;
ch[++m]=p[i];
}
int k=m;
for(int i=n-;i>=;i--){
while(m>k&&sgn(Cross(ch[m]-ch[m-],p[i]-ch[m-]))<=) m--;
ch[++m]=p[i];
}
if(n>) m--;//the first point
return m;
}
int n,x,y;
double ans;
Point p[N],ch[N];
int main(int argc, const char * argv[]) {
while(scanf("%d",&x)!=EOF){
y=read();
p[++n]=Point(x,y);
}
ConvexHull(p,n,ch);
Point S(,);int p;
for(p=;p<=n;p++) if(ch[p]==S) break; for(int i=p;i<=n;i++) printf("(%.0f,%.0f)\n",ch[i].x,ch[i].y);
for(int i=;i<p;i++) printf("(%.0f,%.0f)\n",ch[i].x,ch[i].y);
return ;
}
POJ 2007 Scrambled Polygon [凸包 极角排序]的更多相关文章
- poj 2007 Scrambled Polygon(极角排序)
http://poj.org/problem?id=2007 Time Limit: 1000MS Memory Limit: 30000K Total Submissions: 6701 A ...
- POJ 2007 Scrambled Polygon 凸包点排序逆时针输出
题意:如题 用Graham,直接就能得到逆时针的凸包,找到原点输出就行了,赤果果的水题- 代码: /* * Author: illuz <iilluzen[at]gmail.com> * ...
- POJ 2007 Scrambled Polygon 凸包
Scrambled Polygon Time Limit: 1000MS Memory Limit: 30000K Total Submissions: 7214 Accepted: 3445 ...
- 简单几何(极角排序) POJ 2007 Scrambled Polygon
题目传送门 题意:裸的对原点的极角排序,凸包貌似不行. /************************************************ * Author :Running_Time ...
- POJ 2007 Scrambled Polygon(简单极角排序)
水题,根本不用凸包,就是一简单的极角排序. 叉乘<0,逆时针. #include <iostream> #include <cstdio> #include <cs ...
- POJ 2007 Scrambled Polygon (简单极角排序)
题目链接 题意 : 对输入的点极角排序 思路 : 极角排序方法 #include <iostream> #include <cmath> #include <stdio. ...
- poj 2007 Scrambled Polygon 极角排序
/** 极角排序输出,,, 主要atan2(y,x) 容易失精度,,用 bool cmp(point a,point b){ 5 if(cross(a-tmp,b-tmp)>0) 6 retur ...
- POJ 2007 Scrambled Polygon 极角序 水
LINK 题意:给出一个简单多边形,按极角序输出其坐标. 思路:水题.对任意两点求叉积正负判断相对位置,为0则按长度排序 /** @Date : 2017-07-13 16:46:17 * @File ...
- ●POJ 2007 Scrambled Polygon
题链: http://poj.org/problem?id=2007 题解: 计算几何,极角排序 按样例来说,应该就是要把凸包上的i点按 第三像限-第四像限-第一像限-第二像限 的顺序输出. 按 叉积 ...
随机推荐
- c++(爬楼梯)
前两天上网的时候看到一个特别有意思的题目,在这里和朋友们分享一下: 有一个人准备开始爬楼梯,假设楼梯有n个,这个人只允许一次爬一个楼梯或者一次爬两个楼梯,请问有多少种爬法? 在揭晓答案之前,朋友们可以 ...
- 解析Python中的yield关键字
前言 python中有一个非常有用的语法叫做生成器,所利用到的关键字就是yield.有效利用生成器这个工具可以有效地节约系统资源,避免不必要的内存占用. 一段代码 def fun(): for i i ...
- Linux下安装PostgreSQL 转载linux社区
Linux下安装PostgreSQL [日期:2016-12-25] 来源:Linux社区 作者:xiaojian [字体:大 中 小] 在Linux下安装PostgreSQL有二进制格式安装和 ...
- destoon 默认广告位代码
<img src="http://www.testinstrument.cn/skin/default/jiurong/img/banner.png" alt="& ...
- HttpUrlConnection使用与总结
/* * URL请求的类别分为二类,GET与POST请求.二者的区别在于: * a:) get请求可以获取静态页面,也可以把参数放在URL字串后面,传递给servlet, ...
- iOS学习之Map,定位,标记位置的使用
iOS上使用地图比Android要方便,只需要新建一个MKMapView,addSubView即可.这次要实现的效果如下: 有标注(大头针),定位,地图. 1.添加地图 1.1 新一个Single V ...
- eclipse代码编辑区字符串自动转义设置
在做接口测试时,有时接口请求参数非常多,如果用java相关方法去拼接参数,难度较大,并且非常浪费时间,那如何快速将整个请求参数拼接成一个字符串呢?为了解决这个问题,只要简单配置下eclipse设置即可 ...
- [one day one question] nodejs require 缓存,无法检测文件变化
问题描述: nodejs require 缓存,无法检测文件变化,当文件require引入后,当文件发生变动后即使再次使用require,返回的依然是第一次引入的文件内容,这怎么破? 解决方案: de ...
- 【转】WPF 从FlowDocument中找到Hyperlink
原文地址:How can I get a FlowDocument Hyperlink to launch browser and go to URL in a WPF app? #region Ac ...
- linux_文件系统
什么是文件系统? 存储和组织计算机数据文件的机制 分区和格式化区别? 分区是给房子打隔断,分为厨房.卧室--,格式化相当于给房子装修,让其能够让数据住进去 文件系统: 组织和管理文件 格式化: 往分区 ...