Ros使用Arduino 3用rosserial创建一个subscriber
在前面的一节中,我们已经使用arduino创建了一个publisher节点,接下来将会用arduino来创建一个subscriber,接收电脑传去的信息并做出相应的反应。
1启动Arduino
将arduino开发板连接到电脑的usb口,在arduino IDE中进行设置。
选择Tools->Board,选择你所使用的arduino开发板的类型,所使用的arduino开发板是arduino pro min。
设置好开发板之后,继续选择Tools->Serial Port->/dev/ttyUSB0。
2编译程序
选择File->Examples->ros_lib->Blink,就可以打开一个示例程序,代码如下:
/*
* rosserial Subscriber Example
* Blinks an LED on callback
*/ #include <ros.h>
#include <std_msgs/Empty.h>
//创建了一个节点句柄,这允许我们的程序能够创建发布者和订阅者,节点句柄同样和串口通信有关系。
ros::NodeHandle nh;
// 创建回调函数,必须使用一个消息的常引用作为一个参数。
// 消息类型是 std_msgs::Empty 消息的名字是toggle_msg
// 回调函数中,我们可以引用 toggle_msg,因为他是空的,所以就没必要了。接受到一次,让LED闪烁一次。
void messageCb( const std_msgs::Empty& toggle_msg){
digitalWrite(13, HIGH-digitalRead(13)); // blink the led
}
//创建一个订阅者subscriber , 订阅消息 toggle_led,消息类型是 std_msgs::Empty,回调函数是messageCb()
ros::Subscriber<std_msgs::Empty> sub("toggle_led", &messageCb );
//初始化ros的节点句柄,告知所有将要订阅的话题,订阅你想收听的任何话题。
void setup()
{
pinMode(13, OUTPUT);
nh.initNode();
nh.subscribe(sub);
}
//调用了ros::spinOnce(),在这个函数中,所有ROS通信的回调函数都被处理。
//在loop函数中,我们不需要去做任何其它的处理。因为这个函数ros::spinOnce()将会传递消息给subscriber的回调函数。
void loop()
{
nh.spinOnce();
delay(1);
}
烧录程序
在arduino IDE中点击upload按钮,运行程序。
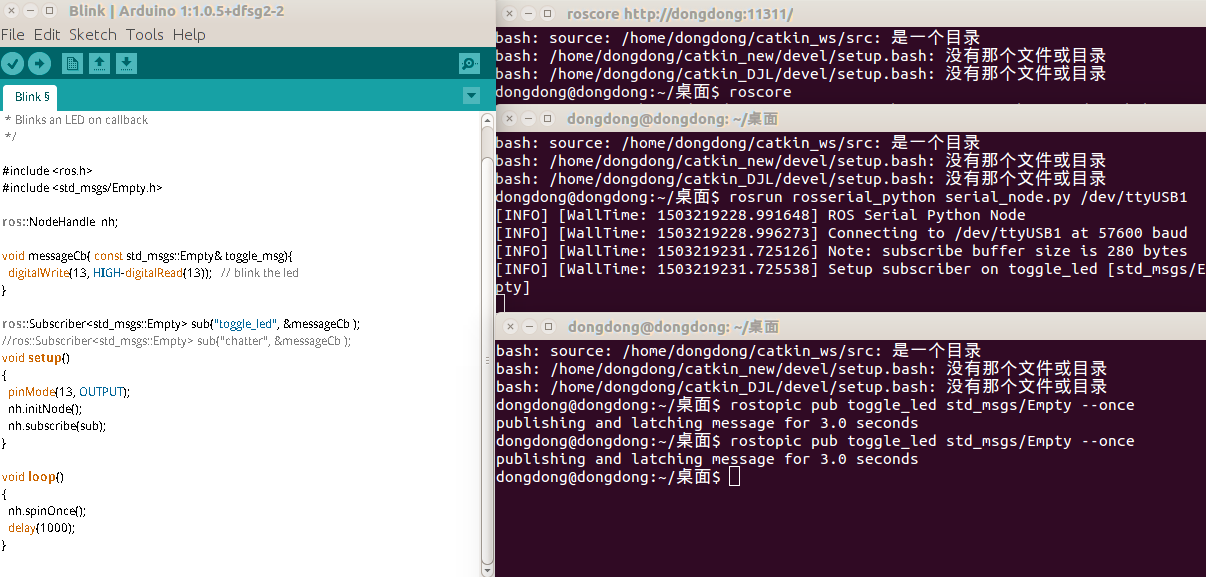
运行ROS
新建窗口
roscore
接着运行rosserial客户端应用,它把你的arduino消息转发到ROS系统的其它部分:
rosrun rosserial_python serial_node.py /dev/ttyUSB0
最后你可以输入一下命令来查看你的arduino板子上的LED灯的变化情况:
rostopic pub toggle_led std_msgs/Empty --once
上述命令运行一次后LED灯亮了,再运行一下次又灭了,如此反复的运行,会发生相应的变化。
Ros使用Arduino 3用rosserial创建一个subscriber的更多相关文章
- Ros使用Arduino 2 使用rosserial创建一个publisher
1 启动arduino 将arduino开发板连接到电脑的usb口,在arduino IDE中进行设置. 选择Tools->Board,选择你所使用的arduino开发板的类型,所使用的ardu ...
- ROS学习记录(三)————创建一个简单的发布节点和订阅节点
暑假在家有些懈怠,不,非常懈怠- -||!良心已经发痛了,想快些补回原来的进度,但忽然发现,中断了一段时间再重新去学习,有的地方连最基本的符号都忘记了 ,这次特意弄个最最基础的,恢复一下,以前的进度. ...
- 创建一个ROS包
先前笔者不知道catkin到底是个什么东东,后来终于在官方网站上找到了答案,原来catkin是ROS的一个官方的编译构建系统,是原本的ROS的编译构建系统rosbuild的后继者.catkin的来源有 ...
- 创建一个ROS工作空间(ROS Workspace)
详细参照 http://wiki.ros.org/ROS/Tutorials/InstallingandConfiguringROSEnvironment1.mkdir -p ~/catkin_ws/ ...
- ROS笔记1 安装及创建一个ROS Package
安装 跟着官方的安装指引来就行了.安装前要先确定自己的ros版本和ubuntu版本.这二者是一一对应的. http://wiki.ros.org/ROS/Installation 主要是package ...
- ROS的初步学习--创建一个工作空间和一个程序包
快速开始 创建工作区(workspace) 工作区可以作为一个独立的项目进行编译,存放ROS程序的源文件.编译文件和执行文件.建立工作区的方法如下: mkdir -p ~/catkin_ws/src ...
- Ros使用Arduino 1安装Arduino IDE
安装Arsuino IDE sudo apt-get install arduino 设置库文件路径 在使用ROS的库文件时,必须在代码的开头包括: #include <ros.h> 接下 ...
- ROS学习笔记(六)——创建、编译包
$ cd ~/catkin_ws #如果新开一个终端,就需要先吧ROS的工作空间配置好 $ source devel/setup.bash #工作空间的环境配置 #正式开始创建包 $ catkin_c ...
- ROS Learning-015 learning_tf(编程) 编写一个监听器程序 (Python版)
ROS Indigo learning_tf-02 编写一个 监听器 程序 (Python版) 我使用的虚拟机软件:VMware Workstation 11 使用的Ubuntu系统:Ubuntu 1 ...
随机推荐
- Linux tar 命令用法
tar 命令可以为linux的文件和目录创建档案.利用 tar,可以为某一特定文件创建档案(备份文件),也可以在档案中改变文件,或者向档案中加入新的文件.tar 最初被用来在磁带上创建档案,现在,用户 ...
- Python爬虫之多线程下载程序类电子书
近段时间,笔者发现一个神奇的网站:http://www.allitebooks.com/ ,该网站提供了大量免费的编程方面的电子书,是技术爱好者们的福音.其页面如下: 那么我们是否可以通过Py ...
- [转]Material使用08 MdDialogModule、MdAutocompleteModule
本文转自:https://www.cnblogs.com/NeverCtrl-C/p/8125346.html 1 MatDialog 1.1 简要描述 MdDialog是一个服务,可以利用它来打开一 ...
- IdentityServer4关于多客户端和API的最佳实践【含多类型客户端和API资源,以及客户端分组实践】【下】
经过前两篇文章你已经知道了关于服务器搭建和客户端接入相关的基本资料,本文主要讲述整个授权系统所服务的对象,以ProtectApi资源为演示 目标: 1)实现多资源服务器针对请求的token校验,接入I ...
- Hive 表类型简述
Hive 表类型简述 表类型一.管理表或内部表Table Type: MANAGED_TABLE example: create table Inner(id int,name string, ...
- [PHP] 算法-数组重复数字统计的PHP实现
在一个长度为n的数组里的所有数字都在0到n-1的范围内. 数组中某些数字是重复的,但不知道有几个数字是重复的.也不知道每个数字重复几次.请找出数组中任意一个重复的数字. 例如,如果输入长度为7的数组{ ...
- Linux将未挂载的磁盘挂载到目录
1.找的未挂载磁盘fdisk -l2.格式化mkfs -t ext4 /dev/xvdc3.挂载目录mount /dev/xvdc /data4.开机启动vi /etc/fstab/dev/xvdc ...
- 关于html5中的 网页图标问题
在html5 中 设置网页图标的语句<link rel="icon" type="image/x-icon" href="favicon.ico ...
- 【pygame游戏编程】第二篇-----移动图像
Learning From Here import pygame import sys pygame.init() screen_width = 640 screen_high = 480 scree ...
- CloudSim源代码学习——任务单元(Cloudlet)
/* * Title: CloudSim Toolkit * Description: CloudSim (Cloud Simulation) Toolkit for Modeling and Sim ...