OpenCV-Python sift/surf特征匹配与显示
import cv2
import numpy as np
def drawMatchesKnn_cv2(img1_gray,kp1,img2_gray,kp2,goodMatch):
h1, w1 = img1_gray.shape[:2]
h2, w2 = img2_gray.shape[:2]
vis = np.zeros((max(h1, h2), w1 + w2, 3), np.uint8)
vis[:h1, :w1] = img1_gray
vis[:h2, w1:w1 + w2] = img2_gray
p1 = [kpp.queryIdx for kpp in goodMatch]
p2 = [kpp.trainIdx for kpp in goodMatch]
post1 = np.int32([kp1[pp].pt for pp in p1])
post2 = np.int32([kp2[pp].pt for pp in p2]) + (w1, 0)
for (x1, y1), (x2, y2) in zip(post1, post2):
cv2.line(vis, (x1, y1), (x2, y2), (0,0,255))
cv2.namedWindow("match",cv2.WINDOW_NORMAL)
cv2.imshow("match", vis)
img1_gray = cv2.imread("D:\\05.jpg")
img2_gray = cv2.imread("D:\\06.jpg")
sift = cv2.SIFT()
#sift = cv2.SURF()
kp1, des1 = sift.detectAndCompute(img1_gray, None)
kp2, des2 = sift.detectAndCompute(img2_gray, None)
# BFmatcher with default parms
bf = cv2.BFMatcher(cv2.NORM_L2)
matches = bf.knnMatch(des1, des2, k = 2)
goodMatch = []
for m,n in matches:
if m.distance < 0.50*n.distance:
goodMatch.append(m)
drawMatchesKnn_cv2(img1_gray,kp1,img2_gray,kp2,goodMatch[:20])
cv2.waitKey(0)
cv2.destroyAllWindows()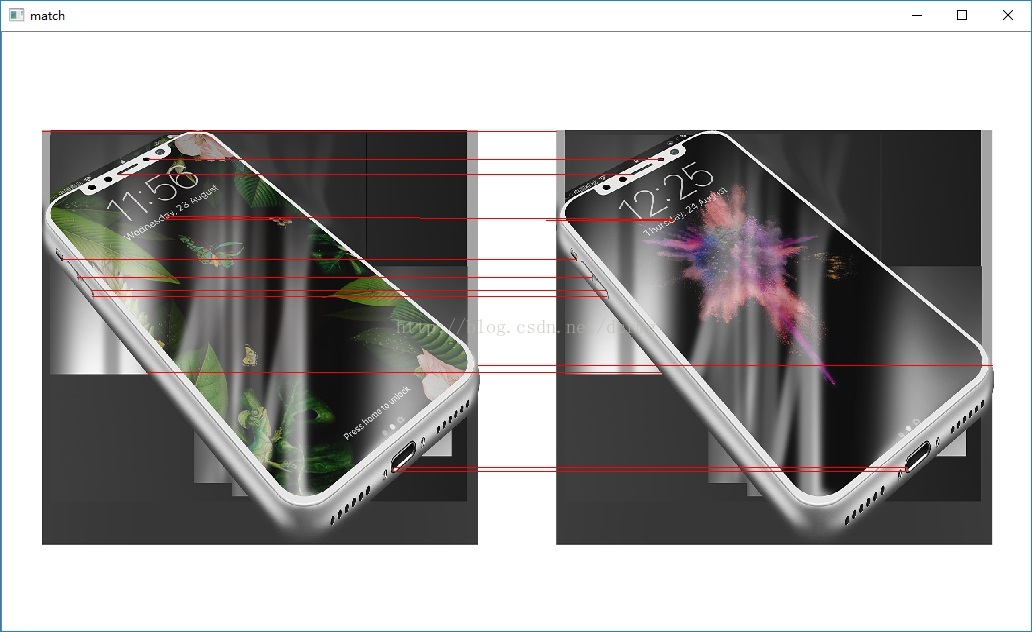
说明:
- 1. Sift特征和Surf特征提取特征的方法略有差异,在整个匹配流程上一样
- 2. knnMatch(des1, des2,k
= 2) 函数执行特征点匹配, k = 2 定义基准图像上的一个点会在另一幅图像上有2个匹配结果。
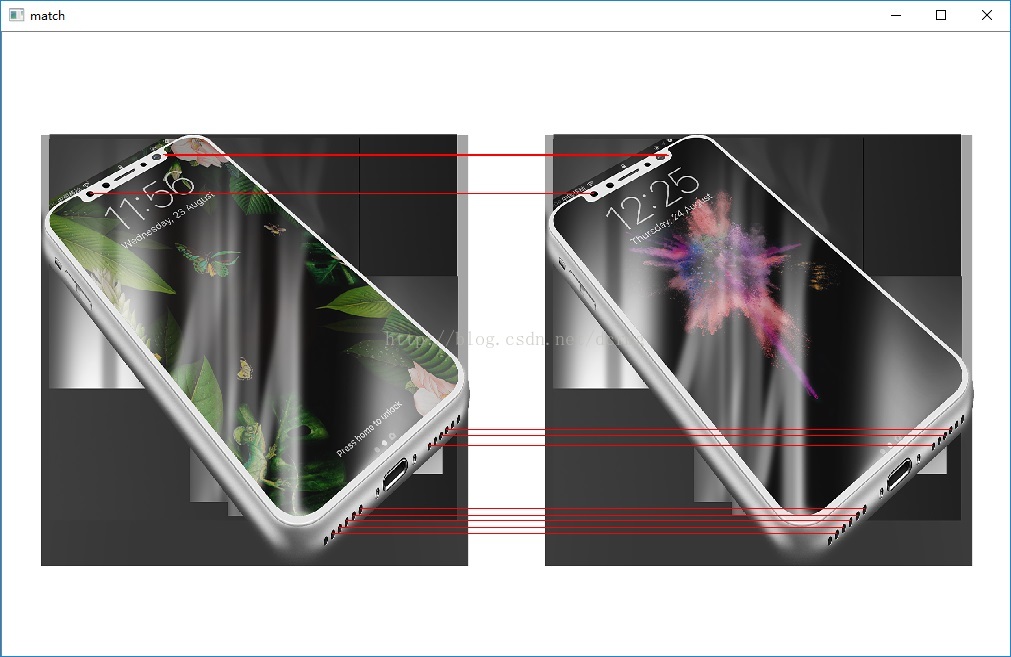
- 3. 不论Sift还是Surf都是强制匹配,不能保证匹配的点就是准确的,只能保证相对正确。
- 4. goodMatch是经过筛选的优质配对,如果2个配对中第一匹配的距离小于第二匹配的距离的0.5,基本可以说明这个第一配对是两幅图像中独特的,不重复的特征点。当然并不能保证goodMatch保留的就是最优匹配。
- 5. OpenCV3中有drawMatchesKnn()函数,可以直接拼接显示配对点,OpenCV2中没有这个函数,定义的drawMatchesKnn_cv2()实现了配对显示部分功能。
OpenCV-Python sift/surf特征匹配与显示的更多相关文章
- 【OpenCV新手教程之十八】OpenCV仿射变换 & SURF特征点描写叙述合辑
本系列文章由@浅墨_毛星云 出品,转载请注明出处. 文章链接:http://blog.csdn.net/poem_qianmo/article/details/33320997 作者:毛星云(浅墨) ...
- Opencv中使用Surf特征实现图像配准及对透视变换矩阵H的平移修正
图像配准需要将一张测试图片按照第二张基准图片的尺寸.角度等形态信息进行透视(仿射)变换匹配,本例通过Surf特征的定位和匹配实现图像配准. 配准流程: 1. 提取两幅图像的Surf特征 2. 对Sur ...
- 利用SIFT进行特征匹配
SIFT算法是一种基于尺度空间的算法.利用SIFT提取出的特征点对旋转.尺度变化.亮度变化具有不变性,对视角变化.仿射变换.噪声也有一定的稳定性. SIFT实现特征的匹配主要包括四个步骤: 提取特征点 ...
- SURF 特征匹配
参考:http://www.cnblogs.com/ronny/p/4045979.html,博主对源码进行了分析,不过很多没看明白. 分为几个部分.积分图:借助积分图像,图像与高斯二阶微分模板的滤波 ...
- OpenCV 之 特征匹配
OpenCV 中有两种特征匹配方法:暴力匹配 (Brute force matching) 和 最近邻匹配 (Nearest Neighbors matching) 它们都继承自 Descriptor ...
- 【OpenCV新手教程之十七】OpenCV重映射 & SURF特征点检測合辑
本系列文章由@浅墨_毛星云 出品.转载请注明出处. 文章链接:http://blog.csdn.net/poem_qianmo/article/details/30974513 作者:毛星云(浅墨) ...
- opencv学习之路(35)、SURF特征点提取与匹配(三)
一.简介 二.opencv中的SURF算法接口 三.特征点匹配方法 四.代码 1.特征点提取 #include "opencv2/opencv.hpp" #include < ...
- opencv surf特征点匹配拼接源码
http://blog.csdn.net/huixingshao/article/details/42672073 /** * @file SURF_Homography * @brief SURF ...
- 基于OpenCV全景拼接(Python)SIFT/SURF
一.实验内容: 利用sift算法,实现全景拼接算法,将给定的两幅图片拼接为一幅. 二.实验环境: 主机配置: CPU :intel core i5-7300 2.50GHZ RAM :8.0GB 运行 ...
随机推荐
- STM32 Option Bytes位 重置为出厂设置
STM32 Option Bytes位 重置为出厂设置 JLINK 按照说明,在IAR安装目录下找到指定的运行程序JLinkSTM32.exe(D:\Program Files (x86)\IAR S ...
- Rancher探秘二:安装Rancher
环境准备 本次安装的是最新版本v2.1.5. 准备Linux环境,需要64位版本,在系统上安装docker,版本17.03.2 安装 docker安装, 登录到Linux服务器上,运行如下命令:sud ...
- CSS3 --添加阴影(盒子阴影、文本阴影的使用)
CSS3 - 给div或者文字添加阴影(盒子阴影.文本阴影的使用)CSS3定义了两种阴影:盒子阴影和文本阴影.其中盒子阴影需要IE9及其更新版本,而文本阴影需要IE10及其更新版本.下面分别介绍两种 ...
- PHP基础知识学习总结
从今天开始过一遍PHP的基础知识 加油 地址:http://www.runoob.com/php/php-mail.html 该看:PHP发送电子邮件 2017年5月23日23:38:30 ...
- Elasticsearch集群问题,导致主master节点发现不了node节点
个人博客:https://blog.sharedata.info/ 最新需要配置es集群采用5个分片和1个副片,正好是11台机器,而只保留一份备份所以只需要5*2=10台机器方案:1.1台作为mast ...
- ios开发:如何用js调用ios
本文转载至 :http://blog.chinaunix.net/uid-29415710-id-4058564.html - (BOOL)webView:(UIWebView *)webView s ...
- EasyNVR结合阿里云/腾讯云CDN实现微信/小程序直播的方案
背景需求: 许多客户有这样的需求:微信公众号做为平台来对摄像机进行直播:可以让用户随时随地打开公共号就可以观看:保证画面的流畅性:保证视频的并发访问量等. 问题分析: 虽然需求看似很简单,其实真正实现 ...
- dubbo开发中使用到的一些服务配置方式
通过之前的学习了解了dubbo的常规的使用,下面我们看看特殊情况或者说真实环境下使用dubbo的一些配置实例. 一.一个接口有多个实现时可以使用group来区分 1.服务提供者配置 <?xml ...
- Numerical Differentiation 数值微分
zh.wikipedia.org/wiki/數值微分 数值微分是数值方法中的名词,是用函数的值及其他已知资讯来估计一函数导数的算法. http://mathworld.wolfram.com/Nume ...
- 【python】-- pymsql 操作MySQL
pymysql 对MySQL数据库进行简单数据操作python模块主要是:MySQLdb.pymsql,MySQLdb模块主要用于python2.X,而python3.X则使用pymsql,pymys ...