《DSP using MATLAB》Problem 8.22
时光飞逝,亲朋会一个一个离我们远去,孤独漂泊一阵子后,我们自己也要离开,

代码:
%% ------------------------------------------------------------------------
%% Output Info about this m-file
fprintf('\n***********************************************************\n');
fprintf(' <DSP using MATLAB> Problem 8.22 \n\n'); banner();
%% ------------------------------------------------------------------------ % -------------------------------
% ω = ΩT = 2πF/fs
% Digital Filter Specifications:
% -------------------------------
wp = 0.4*pi; % digital passband freq in rad/sec
ws = 0.6*pi; % digital stopband freq in rad/sec
Rp = 0.5; % passband ripple in dB
As = 50; % stopband attenuation in dB Ripple = 10 ^ (-Rp/20) % passband ripple in absolute
Attn = 10 ^ (-As/20) % stopband attenuation in absolute % Analog prototype specifications: Inverse Mapping for frequencies
T = 2; % set T = 1
Fs = 1/T;
OmegaP = wp/T; % prototype passband freq
OmegaS = ws/T; % prototype stopband freq % Analog Butterworth Prototype Filter Calculation:
[cs, ds] = afd_butt(OmegaP, OmegaS, Rp, As); % Calculation of second-order sections:
fprintf('\n***** Cascade-form in s-plane: START *****\n');
[CS, BS, AS] = sdir2cas(cs, ds)
fprintf('\n***** Cascade-form in s-plane: END *****\n'); % Calculation of Frequency Response:
[db_s, mag_s, pha_s, ww_s] = freqs_m(cs, ds, 0.5*pi); % Calculation of Impulse Response:
[ha, x, t] = impulse(cs, ds); % Impulse Invariance Transformation:
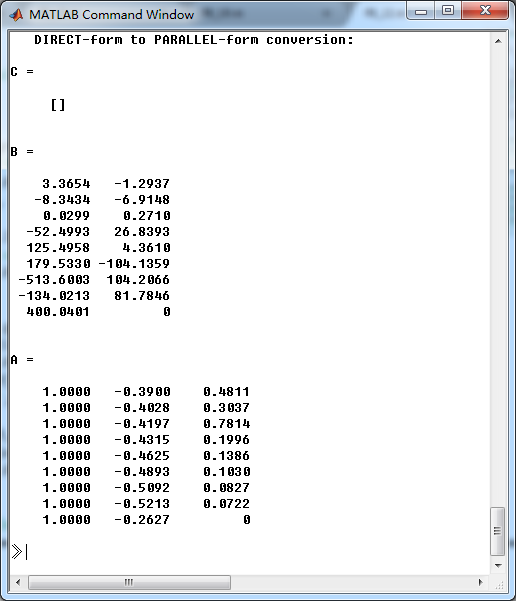
[b, a] = imp_invr(cs, ds, T); [C, B, A] = dir2par(b, a) % Calculation of Frequency Response:
[db, mag, pha, grd, ww] = freqz_m(b, a); %% -----------------------------------------------------------------
%% Plot
%% -----------------------------------------------------------------
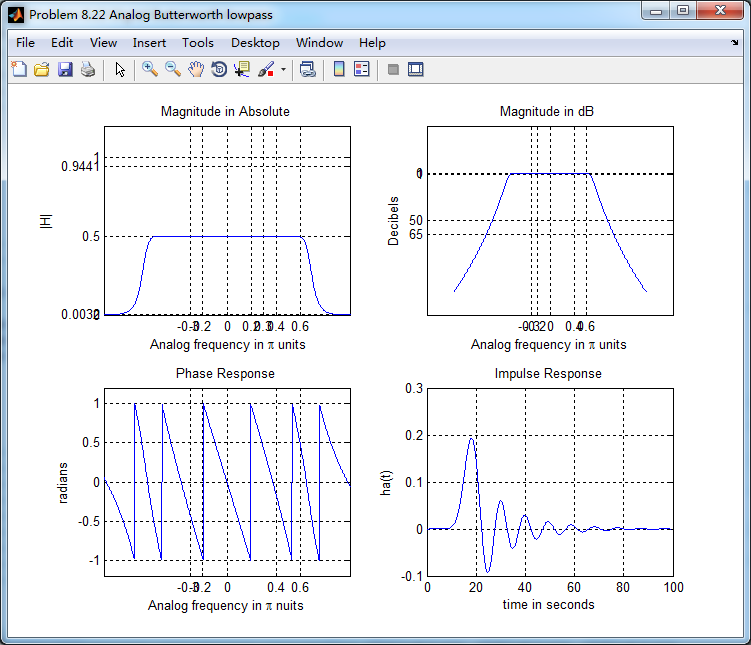
figure('NumberTitle', 'off', 'Name', 'Problem 8.22 Analog Butterworth lowpass')
set(gcf,'Color','white');
M = 1; % Omega max subplot(2,2,1); plot(ww_s, mag_s/T); grid on; axis([-M, M, 0, 1.2]);
xlabel(' Analog frequency in \pi units'); ylabel('|H|'); title('Magnitude in Absolute');
set(gca, 'XTickMode', 'manual', 'XTick', [-0.3, -0.2, 0, 0.2, 0.3, 0.4, 0.6]);
set(gca, 'YTickMode', 'manual', 'YTick', [0, 0.0032, 0.5, 0.9441, 1]); subplot(2,2,2); plot(ww_s, db_s); grid on; %axis([0, M, -50, 10]);
xlabel('Analog frequency in \pi units'); ylabel('Decibels'); title('Magnitude in dB ');
set(gca, 'XTickMode', 'manual', 'XTick', [-0.3, -0.2, 0, 0.4, 0.6]);
set(gca, 'YTickMode', 'manual', 'YTick', [-65, -50, -1, 0]);
set(gca,'YTickLabelMode','manual','YTickLabel',['65';'50';' 1';' 0']); subplot(2,2,3); plot(ww_s, pha_s/pi); grid on; axis([-M, M, -1.2, 1.2]);
xlabel('Analog frequency in \pi nuits'); ylabel('radians'); title('Phase Response');
set(gca, 'XTickMode', 'manual', 'XTick', [-0.3, -0.2, 0, 0.4, 0.6]);
set(gca, 'YTickMode', 'manual', 'YTick', [-1:0.5:1]); subplot(2,2,4); plot(t, ha); grid on; %axis([0, 30, -0.05, 0.25]);
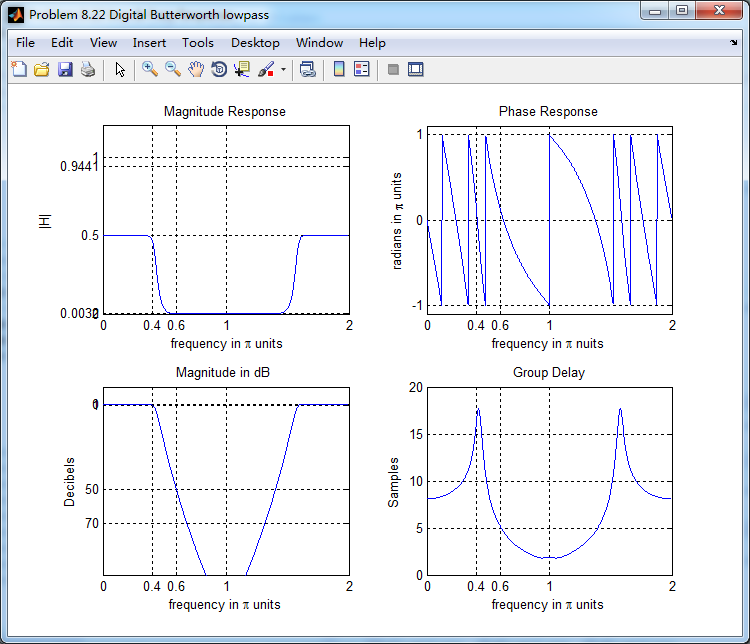
xlabel('time in seconds'); ylabel('ha(t)'); title('Impulse Response'); figure('NumberTitle', 'off', 'Name', 'Problem 8.22 Digital Butterworth lowpass')
set(gcf,'Color','white');
M = 2; % Omega max subplot(2,2,1); plot(ww/pi, mag); axis([0, M, 0, 1.2]); grid on;
xlabel(' frequency in \pi units'); ylabel('|H|'); title('Magnitude Response');
set(gca, 'XTickMode', 'manual', 'XTick', [0, 0.4, 0.6, 1.0, M]);
set(gca, 'YTickMode', 'manual', 'YTick', [0, 0.0032, 0.5, 0.9441, 1]); subplot(2,2,2); plot(ww/pi, pha/pi); axis([0, M, -1.1, 1.1]); grid on;
xlabel('frequency in \pi nuits'); ylabel('radians in \pi units'); title('Phase Response');
set(gca, 'XTickMode', 'manual', 'XTick', [0, 0.4, 0.6, 1.0, M]);
set(gca, 'YTickMode', 'manual', 'YTick', [-1:1:1]); subplot(2,2,3); plot(ww/pi, db); axis([0, M, -100, 10]); grid on;
xlabel('frequency in \pi units'); ylabel('Decibels'); title('Magnitude in dB ');
set(gca, 'XTickMode', 'manual', 'XTick', [0, 0.4, 0.6, 1.0, M]);
set(gca, 'YTickMode', 'manual', 'YTick', [-70, -50, -1, 0]);
set(gca,'YTickLabelMode','manual','YTickLabel',['70';'50';' 1';' 0']); subplot(2,2,4); plot(ww/pi, grd); grid on; %axis([0, M, 0, 35]);
xlabel('frequency in \pi units'); ylabel('Samples'); title('Group Delay');
set(gca, 'XTickMode', 'manual', 'XTick', [0, 0.4, 0.6, 1.0, M]);
%set(gca, 'YTickMode', 'manual', 'YTick', [0:5:35]); figure('NumberTitle', 'off', 'Name', 'Problem 8.22 Pole-Zero Plot')
set(gcf,'Color','white');
zplane(b,a);
title(sprintf('Pole-Zero Plot'));
%pzplotz(b,a); % ----------------------------------------------
% Calculation of Impulse Response
% ----------------------------------------------
figure('NumberTitle', 'off', 'Name', 'Problem 8.22 Imp & Freq Response')
set(gcf,'Color','white');
t = [0:0.01:80]; subplot(2,1,1); impulse(cs,ds,t); grid on; % Impulse response of the analog filter
axis([0,80,-0.2,0.3]);hold on n = [0:1:80/T]; hn = filter(b,a,impseq(0,0,80/T)); % Impulse response of the digital filter
stem(n*T,hn); xlabel('time in sec'); title ('Impulse Responses');
hold off % Calculation of Frequency Response:
[dbs, mags, phas, wws] = freqs_m(cs, ds, 2*pi/T); % Analog frequency s-domain [dbz, magz, phaz, grdz, wwz] = freqz_m(b, a); % Digital z-domain %% -----------------------------------------------------------------
%% Plot
%% ----------------------------------------------------------------- subplot(2,1,2); plot(wws/(2*pi),mags*Fs,'b+', wwz/(2*pi)*Fs,magz,'r'); grid on; xlabel('frequency in Hz'); title('Magnitude Responses'); ylabel('Magnitude'); text(-0.3,0.15,'Analog filter'); text(0.4,0.55,'Digital filter');
运行结果:
通带、阻带绝对指标
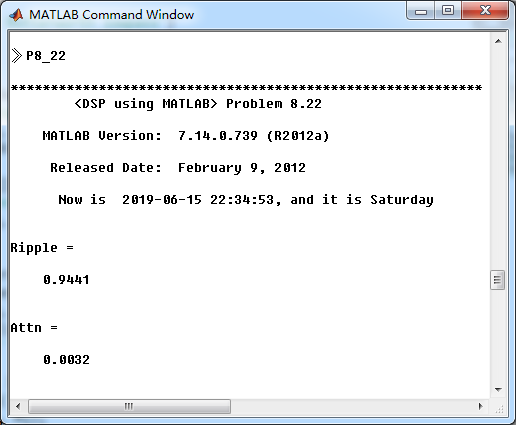
模拟原型butterworth低通滤波器直接形式系数
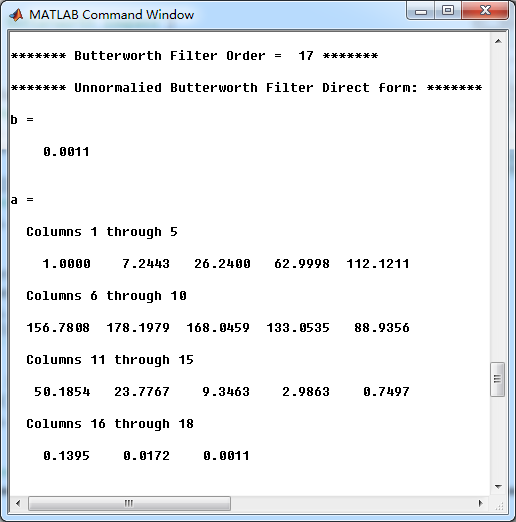
模拟原型butterworth低通滤波器串联形式系数
脉冲响应不变法,模拟低通转换成数字低通,并联形式系数

《DSP using MATLAB》Problem 8.22的更多相关文章
- 《DSP using MATLAB》Problem 6.22
代码: %% ++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ %% Output In ...
- 《DSP using MATLAB》Problem 5.22
代码: %% ++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ %% O ...
- 《DSP using MATLAB》 Problem 3.22
代码: %% ------------------------------------------------------------------------ %% Output Info about ...
- 《DSP using MATLAB》Problem 7.25
代码: %% ++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ %% Output In ...
- 《DSP using MATLAB》Problem 3.1
先写DTFT子函数: function [X] = dtft(x, n, w) %% --------------------------------------------------------- ...
- 《DSP using MATLAB》Problem 7.29
代码: %% ++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ %% Output In ...
- 《DSP using MATLAB》Problem 7.27
代码: %% ++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ %% Output In ...
- 《DSP using MATLAB》Problem 7.26
注意:高通的线性相位FIR滤波器,不能是第2类,所以其长度必须为奇数.这里取M=31,过渡带里采样值抄书上的. 代码: %% +++++++++++++++++++++++++++++++++++++ ...
- 《DSP using MATLAB》Problem 7.24
又到清明时节,…… 注意:带阻滤波器不能用第2类线性相位滤波器实现,我们采用第1类,长度为基数,选M=61 代码: %% +++++++++++++++++++++++++++++++++++++++ ...
随机推荐
- fastjson转jackson
使用fastjson有个内存oom的问题,我们应该尽量使用jackjson,为什么呢?因为fastjson会引发一个oom,很潜在的危险,虽然jackjson的api真的非常好用,对于解析json串来 ...
- Windows 子网掩码
子网掩码(subnet mask)又叫网络掩码.地址掩码.子网络遮罩,它是一种用来指明一个IP地址的哪些位标识的是主机所在的子网,以及哪些位标识的是主机的位掩码.子网掩码不能单独存在,它必须结合IP地 ...
- Perl 基础语法
Perl 基础语法 Perl借用了C.sed.awk.shell脚本以及很多其他编程语言的特性,语法与这些语言有些类似,也有自己的特点. Perl 程序有声明与语句组成,程序自上而下执行,包含了循环, ...
- 修改docker+jenkins挂载目录
1.停止docker [root@jenkins data]# systemctl stop docker 2.创建目录,拷贝数据 [root@jenkins data]# mkdir -p /new ...
- SQLite3与C++的结合应用
SQLite并没有一次性做到位,只有下载这些东西是不能放在vs2010中并马上使用的,下载下来的文件中有sqlite3.c/h/dll/def,还是不够用的.我们需要的sqlite3.lib文件并不在 ...
- win7防火墙里开启端口的图文教程 + SNMP测试感触
转:http://www.cnblogs.com/vipsoft/archive/2012/05/02/2478847.html 开启端口:打开“控制面板”中的“Windows防火墙”,点击左侧的“高 ...
- 尚学linux课程---8、rpm软件包安装
尚学linux课程---8.rpm软件包安装 一.总结 一句话总结: rpm安装软件包的话要解决依赖问题,推荐使用yum安装软件包 1.比如cd /home中的斜线表示什么意思? 表示根目录,linu ...
- VS2010-MFC(工具栏:工具栏资源及CToolBar类)
转自:http://www.jizhuomi.com/software/215.html 上一节讲了菜单及CMenu类的使用,这一节讲与菜单有密切联系的工具栏. 工具栏简介 工具栏一般位于主框架窗口的 ...
- deployment资源
目的:用rc在滚动升级之后,会造成服务访问中孤单,于是k8s引入了deploymentziyuan 创建deployment vim k8s_deploy.yml apiVersion: extens ...
- Java 内部类,成员类,局部类,匿名类等
根据内部类的位置不同,可将内部类分为 :成员内部类与局部内部类. class outer{ class inner{//成员内部类 } public void method() { class loc ...