fpn
class-aware detector 和 class-agnostic detector:https://blog.csdn.net/yeyang911/article/details/68484486
既解决多尺度,又解决小物体
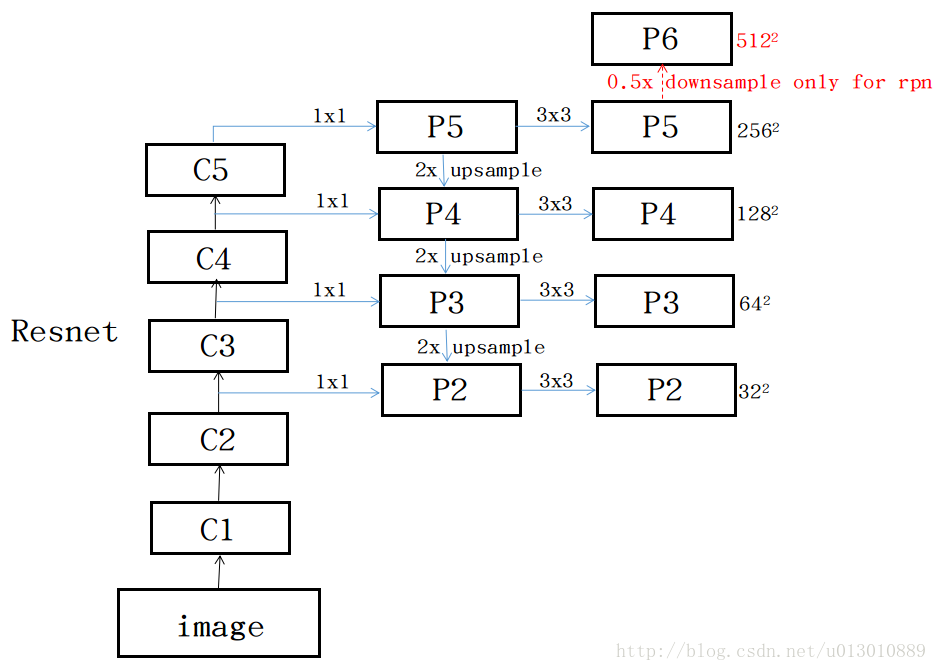
1.实现的细节:rpn阶段用了5个stage,fast阶段只用了4个stage,也就是p6这个stage只用来提取anchor,不参与分类和定位。github上这个代码,反卷积升维前还使用了1*1卷积,原论文中并没有提到这个。每个p阶段生成rpn的时候要跟faster一样,先3*3然后两个1*1分别做分类和定位。每个p阶段提取anchor的时候使用的相同的ratio,是1:2、1:1、2:1。每层设置一个scle,32^2, 64^2, 128^2, 256^2, 512^2分别对应p2到p5,但caffe的复现写的每层都是相同的两个scale。还有一个值得注意的地方,经过横向连接的p阶段的feature map,不是直接作为最后的特征层,而是都要经过一个3*3的卷积生成新的p,原论文说是为了减小上采样带来的混叠效应(“混叠”指的是高频信息在降采样的时候,重叠到低频段上面去的现象,目前也没有一个特别好的解释,暂时这个)。caffe的复现并没有这样做,而是直接拿p阶段的feature map当成最后的特征提取的feature map。
原论文中是使用的最近邻上采样,不是deconv
https://blog.csdn.net/stf1065716904/article/details/78450997
https://blog.csdn.net/u013010889/article/details/78658135
进一步问题:为什么p6只用来提取anchor?
为什么要乘以3*3再两个1*1做分类和定位?
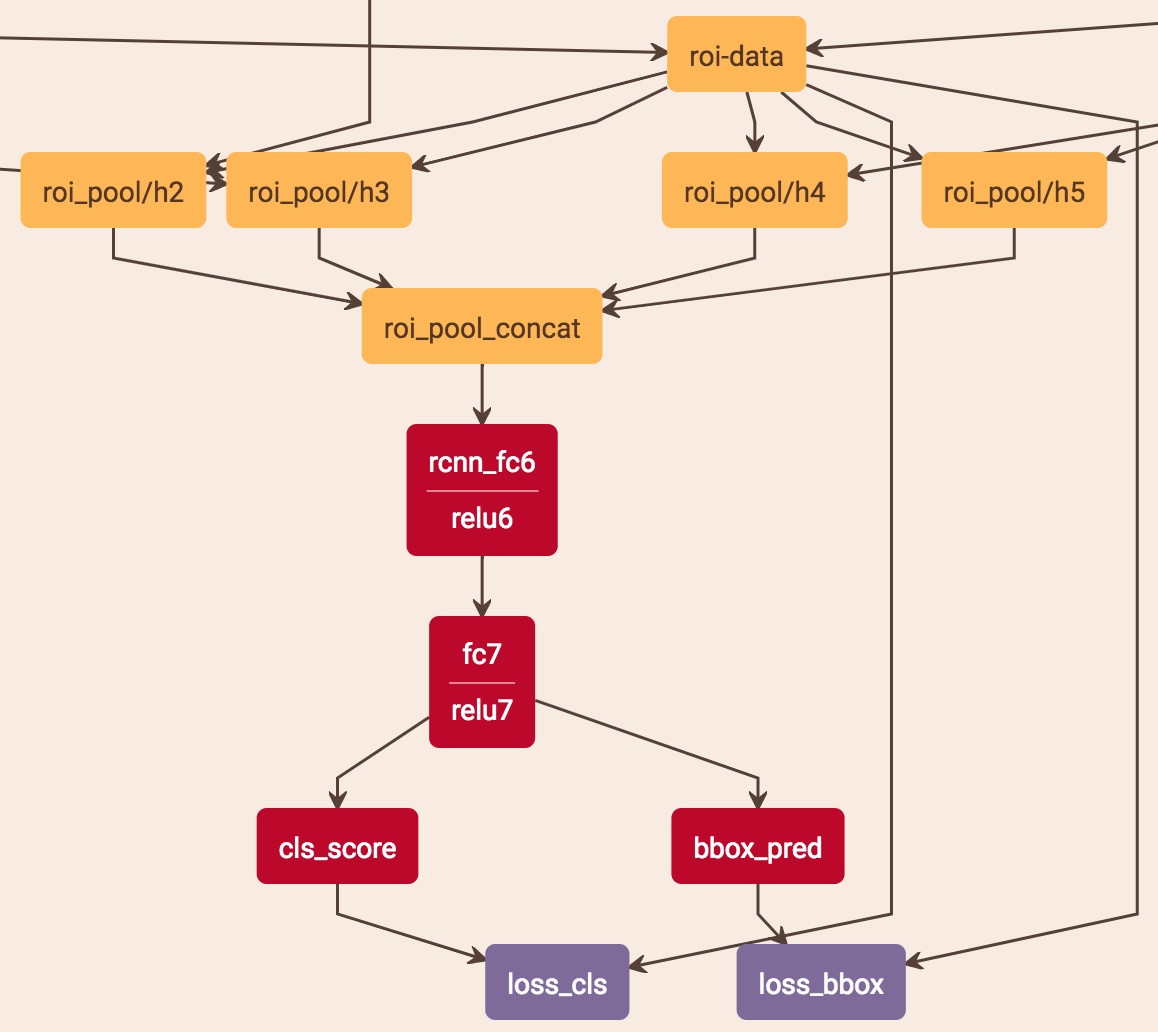
在最后的fast rcnn中,原论文的head部分采用了参数共享,即把从4个层的特征提取层pooling得到的结果用axis = 0 concat起来然后用两个fc:
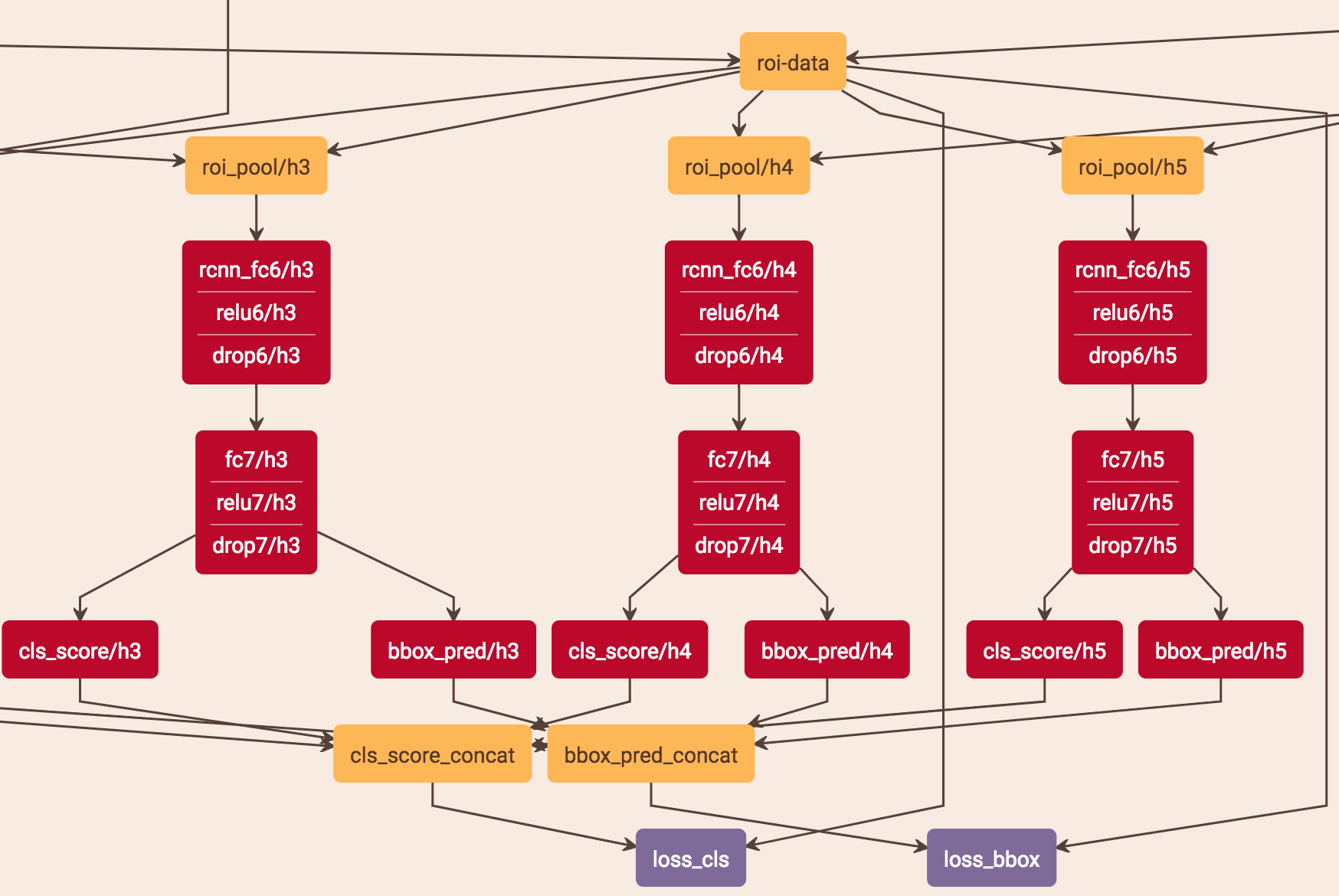
caffe的代码使用了两个版本,一个共享,一个不共享:
https://zhuanlan.zhihu.com/p/35854548这篇博客也提到要参数共享
2.roi怎么区分从哪个层里出来
通过roi本身的长宽判断。每个roi设置layer_index,layer_index通过下式获得:
k0 = 4,wh为roi的长宽,相当于以第4层为基准进行加减。以w、h分别为224的1/2,那log出来的结果就是-1,就是第三层。
具体实现的细节:不可能所有的刚好都为224的整数倍,所以进行了向下取整。因为网络本身只用p2-p5,所以结果小于2的k为2,大于5的k为5,相当于更小的放在p2阶段,更大的放在p5阶段。总的分布情况是:(0,112)在p2,[112,224]在p3,(224,448)在p4,[448,+∞)在p5.
延伸问题:为什么要除以224?为什么要以p4为基准?为什么要向下取整?
向下取整?因为很多size肯定不能整除,但需要指定在哪一层,所以需要取整。向下的原因还没有想清楚
为什么要除以224?为什么要以p4为基准?
原论文说224是canonical Imagenet pre-training size,可以这样理解,pre-train的模型做分类识别就是识别的224size的图,现在的检测框相当于把整个图拿来做分类识别,并且网络的初始化参数来自于在imagenet上pre-train好的分类参数。
自己的一些拍脑袋想法:
我曾觉得会不会所有的anchor集中在某一个p stage,其他p stage没有anchor导致性能不好。对于一般的拥有大小物体的图片而言,应该是所有p stage可能都有的,不过也许可能出现正anchor集中在某一个p stage,其他p stage全是负样本,但是其他p stage也还是在学习的。换另一种idea想,即使就算你所有的正负anchor都集中在p2(比如只检测小物体,可能绝大部分就集中在p2),其他层也是会学到的,因为p2有一个分支会来自其他高层的横向连接,反向传播也会传递给这些高层,相当于stage2(是网路原本的backbone,不是1*1卷积生成的p2)部分,既要受到来自stage3个梯度,也要受到来自p2的梯度,两个梯度其实也相当于两个监督,就像mask那样,但是这个有有点不一样,因为这两个梯度来自于同一个loss。但是如果你既有p5的loss又有p2的loss,那stage2的梯度既有p2的,也有p5的,p5这部分的梯度又可以分为p2的和p5的。不过这里就牵涉到另一个idea,如果只有小物体作为训练,那是不是性能会比既有小又有大的变差,因为你的梯度变少,你的高层的语义信息可能训练的并没有那么好。
2.eltwise和concat的优缺点
concat首先容易出现问题,其次参数量增加
eltwise,即使a的值很大,b的值很小,相加后,是ab共同大的地方加起来依旧大,相应也就依旧保留,也就保留了这种位置信息,但concat好像并不能
3.横向连接的时候为什么要先1*1?
a.做降维保证都是256
b.缓冲作用,防止梯度直接影响bottom-up主干网络,更稳定
为什么要保证都是是同一个维度?
因为为了elemtwise相加
进一步问题:为什么要选择256?
4.几个重要的对比实验:
a.去掉top-down,类似于SSD在各个不同scale的feature上做预测。具体做法是:保留横向连接1*1,同时也保留3*3然后生成新的p stage。和基础model比,效果是rpn的召回率高了,但小物体的召回率反而降低了;ap值降低了,小、中、大都降低了。作者认为这是因为stage之间的语义差别特别大,特别是深层网络。证明了top-down的重要性。
b.砍掉横向连接,只保留自上而下放大 feature map 做预测(我自己之前以为只是说去掉1*1,浅层的还是要和高层的融合,这个想法是错误的)。这个做法出来的结果是召回率大大降低,ap相较于base模型提升了,相较于fpn降低了。其实这个做法相当于把网络加深,这样语义信息更加加强了,所以ap值会升高。这里实际上预测的层,feature map像素和fpn的像素是一样大的,按理说语义信息还提高了,但是ap却低与fpn,主要原因是位置信息不够精确,因为这些层经过了多次的上下采样。按理说,下采样才会到底位置信息不准确,上采样是怎么导致的?
c.这个是只用迭代到最后分辨率最高的P2,所有scale和比例的anchor都在P2取,由于P2比较大所有scale都在它上面取,anchor数量提升了很多,速度会慢。它的精度好于baseline但是低于原始的fpn。作者认为在金字塔不同level滑动能增加对尺寸不变性的鲁棒性。这种方式会生成比fpn更多的anchor,这个实验证明并不是越多的anchor性能就越好,个人觉得还是质量越高的anchor性能才越好。
5.作者还提出了一个重要观点:在RPN和object detection任务中,FPN中每一层的heads 参数都是共享的,作者认为共享参数的效果也不错就说明FPN中所有层的语义都相似
6.横向连接的时候直接使用1*1,而没有加非线性的激活函数,作者实验发现会有轻微影响。为什么会有?其实我需要的是准确的位置信息,但非线性其实提供的是一些特征提取,导致一些原始的信息丢失。
CVPR 现场 QA:
1. 不同深度的 feature map 为什么可以经过 upsample 后直接相加?
A:作者解释说这个原因在于我们做了 end-to-end 的 training,因为不同层的参数不是固定的,不同层同时给监督做 end-to-end training,所以相加训练出来的东西能够更有效地融合浅层和深层的信息。
2. 为什么 FPN 相比去掉深层特征 upsample(bottom-up pyramid) 对于小物体检测提升明显?(RPN 步骤 AR 从 30.5 到 44.9,Fast RCNN 步骤 AP 从 24.9 到 33.9)
A:作者在 poster 里给出了这个问题的答案

对于小物体,一方面我们需要高分辨率的 feature map 更多关注小区域信息,另一方面,如图中的挎包一样,需要更全局的信息更准确判断挎包的存在及位置。
3. 如果不考虑时间情况下,image pyramid 是否可能会比 feature pyramid 的性能更高?
A:作者觉得经过精细调整训练是可能的,但是 image pyramid 主要的问题在于时间和空间占用太大,而 feature pyramid 可以在几乎不增加额外计算量情况下解决多尺度检测问题。
fpn的速度加快了?
原始的resnet做faster,最后一层特征提取层是2048(或者是1024?),但现在的fpn的最后几层做pooling的feature map只有256,所以论文说速度加快了has a lighter weight head,因为per region 的计算变少了。不过作者也说Our method introduces small extra cost by the extra layers in the FPN。
这样说来,如果都是提取的相同的channel,fpn速度应该还是增加吧。不过考虑一个问题,faster是一个一个roi做pooling,但是fpn多个roi其实是可以做并行的?这个有待观察。
代码实现:https://github.com/unsky/FPN
fpn的更多相关文章
- 【深度学习】目标检测算法总结(R-CNN、Fast R-CNN、Faster R-CNN、FPN、YOLO、SSD、RetinaNet)
目标检测是很多计算机视觉任务的基础,不论我们需要实现图像与文字的交互还是需要识别精细类别,它都提供了可靠的信息.本文对目标检测进行了整体回顾,第一部分从RCNN开始介绍基于候选区域的目标检测器,包括F ...
- Feature Pyramid Networks for Object Detection比较FPN、UNet、Conv-Deconv
https://vitalab.github.io/deep-learning/2017/04/04/feature-pyramid-network.html Feature Pyramid Netw ...
- 利用FPN构建Faster R-CNN检测
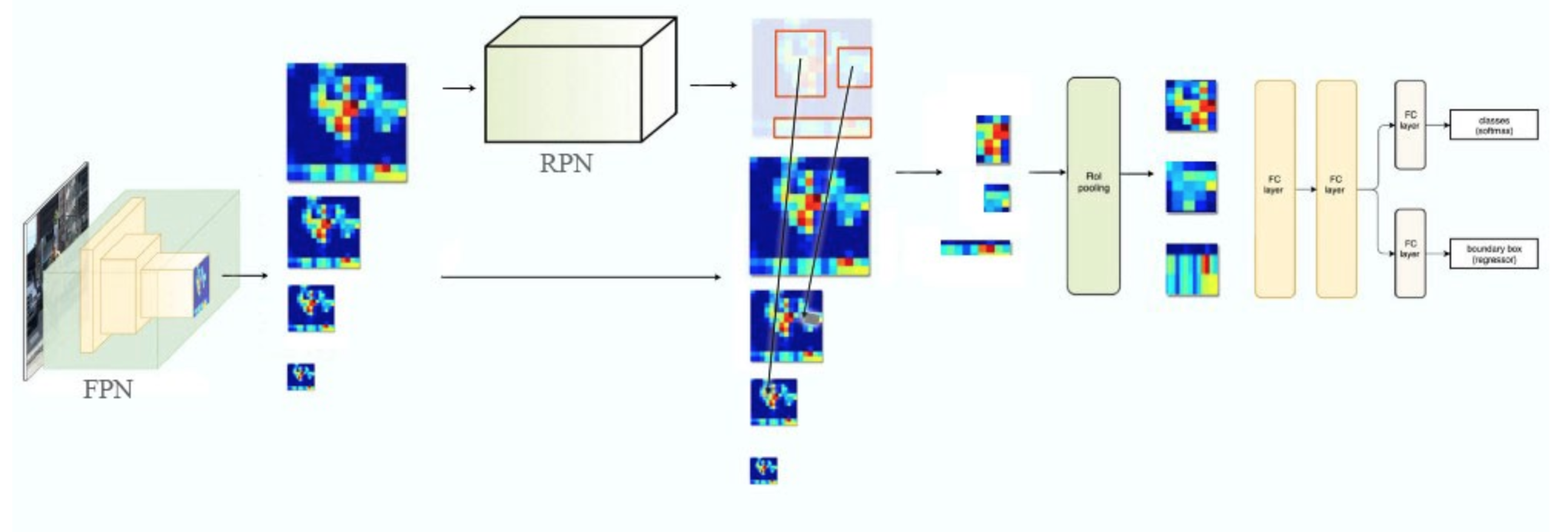
FPN就是所谓的金字塔结构的检测器,(Feature Pyramid Network) 把FPN融合到Faster rcnn中能够很大程度增加检测器对全图信息的认知, 步骤如图所示: 1.先将图像送入 ...
- 论文阅读笔记三十三:Feature Pyramid Networks for Object Detection(FPN CVPR 2017)
论文源址:https://arxiv.org/abs/1612.03144 代码:https://github.com/jwyang/fpn.pytorch 摘要 特征金字塔是用于不同尺寸目标检测中的 ...
- 目标检测之faster-RCNN和FPN
今年(2017年第一季度),何凯明大神出了一篇文章,叫做fpn,全称是:feature pyramid network for object Detection,为什么发这篇文章,根据 我现在了解到的 ...
- FPN 学习笔记
通常,利用网络对物体进行检测时,浅层网络分辨率高,学到的是图片的细节特征,深层网络,分辨率低,学到的更多的是语义特征. 1).通常的CNN使用如下图中显示的网络,使用最后一层特征图进行预测 例如VGG ...
- 『计算机视觉』Mask-RCNN_推断网络其四:FPN和ROIAlign的耦合
一.模块概述 上节的最后,我们进行了如下操作获取了有限的proposal, # [IMAGES_PER_GPU, num_rois, (y1, x1, y2, x2)] # IMAGES_PER_GP ...
- 『计算机视觉』Mask-RCNN_推断网络其二:基于ReNet101的FPN共享网络暨TensorFlow和Keras交互简介
零.参考资料 有关FPN的介绍见『计算机视觉』FPN特征金字塔网络. 网络构架部分代码见Mask_RCNN/mrcnn/model.py中class MaskRCNN的build方法的"in ...
- 『计算机视觉』FPN:feature pyramid networks for object detection
对用卷积神经网络进行目标检测方法的一种改进,通过提取多尺度的特征信息进行融合,进而提高目标检测的精度,特别是在小物体检测上的精度.FPN是ResNet或DenseNet等通用特征提取网络的附加组件,可 ...
- 物体检测之FPN及Mask R-CNN
对比目前科研届普遍喜欢把问题搞复杂,通过复杂的算法尽量把审稿人搞蒙从而提高论文的接受率的思想,无论是著名的残差网络还是这篇Mask R-CNN,大神的论文尽量遵循著名的奥卡姆剃刀原理:即在所有能解决问 ...
随机推荐
- hdu 1880 魔咒词典 (字符串哈希)
魔咒词典 Time Limit: 8000/5000 MS (Java/Others) Memory Limit: 32768/32768 K (Java/Others)Total Submis ...
- Android之NDK环境配置+JNI开发+so文件编译
前言 这边Android作为日常记录,虽然破坏了文章队形~ 最近人工智能挺火的,也稍微了解了一些库,比如关于视觉库openCV.要在安卓下调用这些C/C++库,需要用到JNI开发,在此把过程分享一 ...
- 原生JavaScript插件开发[转]
一起学习下 插件的开发,原生的. 看了这文章 JavaScript插件开发从入门到精通系列---原生JavaScript插件开发 附上 读完小结: 看了下,比较小白的方式就是把一些代码,放到一个单独的 ...
- Kafak Confluent
- JavaScript : Array assignment creates reference not copy
JavaScript : Array assignment creates reference not copy 29 May 2015 Consider we have an array var a ...
- 03_netty实现聊天室功能
[概述] 聊天室主要由两块组成:聊天服务器端(ChatRoomServer)和聊天客户端(ChatClient). [ 聊天服务器(ChatRoomServer)功能概述 ] 1.监听所有客户端的接入 ...
- 中专生自学Android到找到工作的前前后后
我是一名中专生,在学校里读的是计算机专业,但是由于学校不好大部分同学都不爱学习来这里几乎大部分都是在混日子的,虽然我中考的成绩不差,但是因为家里穷考虑到以后没钱读大学我毅然来到这里,虽然是中专,但是我 ...
- Mybatis学习第二天——mapper的动态代理
传统的Dao层开发通过接口与实现类的方式,Mybatis中通过mapper动态代理是需要定义接口. 1.传统Dao层封装 那么可以将公共资源提取出来,剩余的封装成方法来实现.下面是UserDaoImp ...
- C# 元素组合算法
class Program { static void Main(string[] args) { string[] a = { "A", "B", " ...
- Server runtime
spring mvc常用的注解: 个介绍. @Controller @Controller 负责注册一个bean 到spring 上下文中,bean 的ID 默认为 类名称开头字母小写,你也可以自己指 ...