机器人学 —— 轨迹规划(Configuration Space)
之前的轨迹规划中,我们只考虑了质点,没有考虑机器人的外形与结构。直接在obstacle map 中进行轨迹规划,然而世纪情况中,机器人有固定外形,可能会和障碍物发生碰撞。此情况下,我们针对机器人自由度进行建模,给定其运动空间,如果是扫地机器人,那么其自由度是x-y的平移,如果是N自由度机械臂,其自由度是电机转角,我们针对此自由度,构建Configuration Space 并在其中使用A* 或者DJ 算法进行轨迹规划。

1、干涉碰撞检查
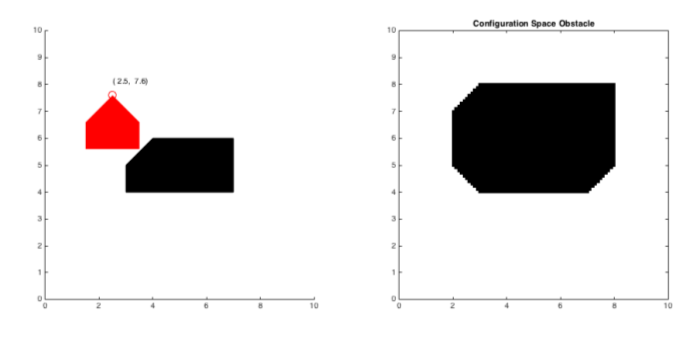
构建 Configuration Space 任务的pipeline 如下:空间离散化 --- 干涉碰撞检查 --- 生成 Obstacle Map --- Motion Plan.
所以,其核心的核心就是干涉碰撞检查,检查 Configuration Space 中的点,会不会导致机器人与障碍物碰撞。 干涉碰撞检测的方法是将机器人与物体进行三角化,并利用三角重叠检测的方法来对物体碰撞进行检查。
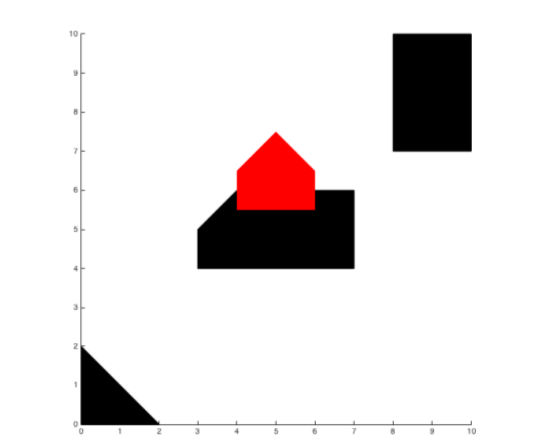


两个三角形共有6条边,如果存在某条边,使得顶点分别位于边的两边则两个三角形未发生碰撞。代码如下:
P{1} = P1;
P{2} = P2;
linesP1(1,:) = cross([P1(2,:) 1],[P1(3,:) 1]);
linesP1(2,:) = cross([P1(1,:) 1],[P1(3,:) 1]);
linesP1(3,:) = cross([P1(1,:) 1],[P1(2,:) 1]);
Lines{1} = linesP1;
linesP2(1,:) = cross([P2(2,:) 1],[P2(3,:) 1]);
linesP2(2,:) = cross([P2(1,:) 1],[P2(3,:) 1]);
linesP2(3,:) = cross([P2(1,:) 1],[P2(2,:) 1]);
Lines{2} = linesP2;
Result_Judge = zeros(3,1);
lines = Lines{1};
for line_idx = 1:3
line = lines(line_idx,:);
Point_Tri = [P{1}(line_idx,:) 1]*line';
for point_idx = 1:3
Result_Judge(point_idx) = [P{2}(point_idx,:) 1]*line';
end
if Point_Tri>0 && all(Result_Judge<0)
flag = false;
return
elseif Point_Tri<0 && all(Result_Judge>0)
flag = false;
return
end
end
lines = Lines{2};
for line_idx = 1:3
line = lines(line_idx,:);
Point_Tri = [P{2}(line_idx,:) 1]*line';
for point_idx = 1:3
Result_Judge(point_idx) = [P{1}(point_idx,:) 1]*line';
end
if Point_Tri>0 && all(Result_Judge<0)
flag = false;
return
elseif Point_Tri<0 && all(Result_Judge>0)
flag = false;
return
end
end
flag = true;
此算法的缺点是非常非常慢。而且由于需要使用流进行判断,不方便GPU并行处理。我正在思考如何利用异构并行实现碰撞检测。
2、轨迹规划
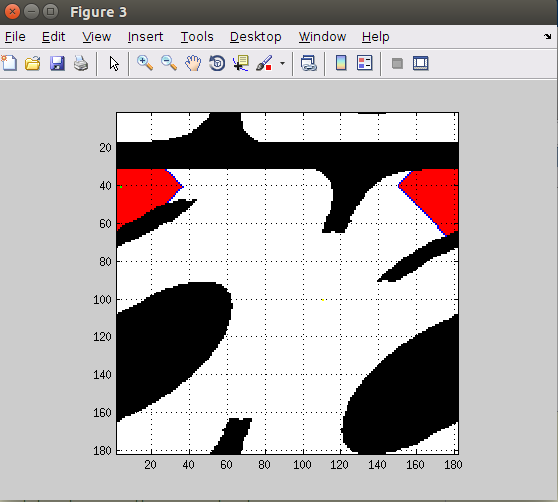
对于机械臂而言,轨迹规划算法与平面机器人差异并不大,但是需要注意的是,机械臂的关节角可以认为是360度的。具体体现在可以从Configuration Space 的另一头穿越出来。如下:
机器人学 —— 轨迹规划(Configuration Space)的更多相关文章
- 机器人学 —— 轨迹规划(Artificial Potential)
今天终于完成了机器人轨迹规划的最后一次课了,拜拜自带B - BOX 的 Prof. TJ Taylor. 最后一节课的内容是利用势场来进行轨迹规划.此方法的思路非常清晰,针对Configration ...
- 机器人学 —— 轨迹规划(Sampling Method)
上一篇提到,机器人轨迹规划中我们可以在 Configuration Space 中运行A* 或者 DJ 算法.无论A* 还是DJ 算法,都必须针对邻域进行搜索,如果2自由度则有4邻域,2自由度则有8邻 ...
- 机器人学 —— 轨迹规划(Introduction)
轨迹规划属于机器人学中的上层问题,其主要目标是计划机器人从A移动到B并避开所有障碍的路线. 1.轨迹计划的对象 轨迹规划的对象是map,机器人通过SLAM获得地map后,则可在地图中选定任意两点进行轨 ...
- 机器人运动规划中的构形空间(Configuration Space)
A key concept in motion planning is configuration space, or C-space for short. Every point in the C- ...
- 机器人关节空间轨迹规划--S型速度规划
关节空间 VS 操作空间 关节空间与操作空间轨迹规划流程图如下(上标$i$和$f$分别代表起始位置initial和目标位置final): 在关节空间内进行轨迹规划有如下优点: 在线运算量更小,即无需进 ...
- 软件篇-04-OMPL和FCL用于SLAM轨迹规划
使用OMPL内置的infoRRTstar算法模块和FCL碰撞检测库实现当前点和目标点的轨迹规划, 参考文章:https://www.cnblogs.com/shhu1993/p/7062099.htm ...
- 【2018.04.19 ROS机器人操作系统】机器人控制:运动规划、路径规划及轨迹规划简介之一
参考资料及致谢 本文的绝大部分内容转载自以下几篇文章,首先向原作者致谢,希望自己能在这些前辈们的基础上能有所总结提升. 1. 运动规划/路径规划/轨迹规划的联系与区别 https://blog.csd ...
- 机器人中的轨迹规划(Trajectory Planning )
Figure. Several possible path shapes for a single joint 五次多项式曲线(quintic polynomial) $$\theta(t)=a_0+ ...
- zz自动驾驶中轨迹规划的探索和挑战
大家好,今天我们主要介绍一下轨迹规划的探索和挑战,我主要从四个方面介绍: 轨迹规划的概念 决策 横向规划 纵向规划 轨迹规划的概念: 轨迹规划的核心就是要解决车辆该怎么走的问题.比如我们知道了附近有行 ...
随机推荐
- Liferay IDE3.1 M1的一些新功能
定于11月发布的Liferay IDE提供了一些让人期许的功能 1. code upgrade tools 这个工具将会帮助你把liferay 6.2的项目升级为7.0的项目.下面列举其主要功能 1. ...
- SQL Server 中使用 convert 转换 datetime 格式示例
Select CONVERT(varchar(100), GETDATE(), 0): 05 16 2006 10:57AMSelect CONVERT(varchar(100), GETDATE() ...
- appium 调试问题--UiAutomator died while responding to command
运行程序问题: 解决办法: 手机系统版本较低导致,我是V4.2.2,在android 4.3 系统上运行正常 代码如下: #coding=utf-8 ''' 作者:xxx 功能:测试计算器基本功能 注 ...
- Dijkstra算法亲自实践
按路径长度递增次序产生算法: 把顶点集合V分成两组: (1)S:已求出的顶点的集合(初始时只含有源点V0) (2)V-S=T:尚未确定的顶点集合 将T中顶点按递增的次序加入到S中,保证: (1)从源点 ...
- 在listener或者工具中使用spring容器中的bean实例
在项目中经常遇见需要在Listener中或者工具中使用Spring容器中的bean实例,由于bean不能在stataic的类中使用. 介绍一种方式: public class SpringTool { ...
- NYOJ-949 哈利波特 AC 分类: NYOJ 2013-12-30 12:57 217人阅读 评论(0) 收藏
#include<stdio.h> int main(){ long long a,b,c,d,e,f; while(scanf("%lld%lld%lld%lld%lld%ll ...
- Ruby中的Profiling工具
看看如何调试Ruby的性能问题 李哲 - APRIL 08, 2015 Ruby内置的profiler 内置的profiler实现的很简单,在ruby2.2中只有150行代码,大家可以看看它的实现pr ...
- VS2012 win7 修改TFS登陆账号
1.修改登陆账号: 在网上搜了好多,都没有找到解决方法,自己琢磨了一会找到了修改登陆TFS(Team Foundation Server)(团队资源管理器)的账号,和大家分享一下吧. 点击“开始”-- ...
- main函数和启动例程
为什么汇编程序的入口是_start,而C程序的入口是main函数呢?本节就来解释这个问题.在讲例 18.1 “最简单的汇编程序”时,我们的汇编和链接步骤是: $ as hello.s -o hello ...
- EF 中更新模型的问题,这种错误(因为相同类型的其他实体已具有相同的主键值。)
在EF经常在更新模型的时候可能会同时操作一个实体几次. 其实除了SaveChanges外,其它的几次基本都是要查询出一个结果, 例如更新的时候,我们要查一下这个表中有没有相同的纪录之类的. 查询完之后 ...