在PCL中如何实现点云压缩(1)
点云由庞大的数据集组成,这些数据集通过距离、颜色、法线等附加信息来描述空间三维点。此外,点云能以非常高的速率被创建出来,因此需要占用相当大的存储资源,一旦点云需要存储或者通过速率受限制的通信信道进行传输,提供针对这种数据的压缩方法就变得十分有用。PCL库提供了点云压缩功能,它允许编码压缩所有类型的点云,包括“无序”点云,它具有无参考点和变化的点尺寸、分辨率、分布密度和点顺序等结构特征。而且,底层的octree数据结构允许从几个输入源高效地合并点云数据。
图1 点云压缩示意图
下面,我们解释单个点云和点云数据流是如何高效压缩的,在给出的例子中,我们用PCL点云压缩技术来压缩用OpenNIGrabber抓取到的点云。
代码:
首先,在PCL(Point Cloud Learning)中国协助发行的书提供光盘的第6章例1文件夹中,打开名为point_cloud_compression.cpp的代码文件。
解释说明
下面详细解析打开的源代码。从主函数开始,首先创建一个新的SimpleOpenNIViewer实例并调用它的run()方法。
int
main(int argc,char **argv)
{
SimpleOpenNIViewer v;
v.run();
return();
}
在run()函数中,创建PointCloudCompression类的对象来编码和解码,这些对象把压缩配置文件作为配置压缩算法的参数,所提供的压缩配置文件为OpenNI兼容设备采集到的点云预先确定的通用参数集。本例中,使用MED_RES_ONLINE_COMPRESSION_WITH_COLOR配置参数集,它应用5立方毫米的编码精度并且允许彩色纹理成分编码,并进一步优化,用于快速在线压缩。压缩配置文件的完整列表及其配制方法可以在文件“/io/include/pcl/compression/compression_profiles.h”中找到。在PointCloudCompression构造函数中使用MANUAL_CONFIGURATION属性就可以手动设置压缩算法全部参数。
bool showStatistics=true; //设置在标准设备上输出打印出压缩结果信息
// 压缩选项详见 /io/include/pcl/compression/compression_profiles.h
pcl::octree::compression_Profiles_e compressionProfile=pcl::octree::MED_RES_ONLINE_COMPRESSION_WITH_COLOR;
// 初始化压缩与解压缩对象,其中压缩对象需要设定压缩参数选项,解压缩按照数据源自行判断
PointCloudEncoder=new pcl::octree::PointCloudCompression<pcl::PointXYZRGBA> (compressionProfile, showStatistics);
PointCloudDecoder=new pcl::octree::PointCloudCompression<pcl::PointXYZRGBA> ();
下面的代码为OpenNI兼容设备实例化一个新的采集器,并且启动循环回调接口,每从设备获取一帧数据,就调用回调函数一次,这里的回调函数实现数据压缩和可视化解压缩结果。
//创建从 OpenNI获取点云的抓取对象
pcl::Grabber* interface =new pcl::OpenNIGrabber ();
boost::function<void(constpcl::PointCloud<pcl::PointXYZRGBA>::ConstPtr&)> f = boost::bind (&SimpleOpenNIViewer::cloud_cb_, this, _1);//建立回调函数
// 建立回调函数与回调信号之间绑定
boost::signals2::connection c = interface->registerCallback (f);
// 开始接收点云数据流
interface->start ();
while (!viewer.wasStopped ())
{
sleep (1);
}
interface->stop ();
在OpenNIGrabber采集循环执行的回调函数cloud_cb_中,我们首先把获取到的点云压缩到stringstream缓冲区,下一步是解压缩,它对压缩了的二进制数据进行解码,存储在新的点云对象中,解码了的点云被发送到点云可视化对象中进行实时可视化。
void
cloud_cb_ (const pcl::PointCloud<pcl::PointXYZRGBA>::ConstPtr &cloud)
{
if (!viewer.wasStopped ())
{
std::stringstream compressedData;// 存储压缩点云的字节流对象
pcl::PointCloud<pcl::PointXYZRGBA>::Ptr cloudOut // 存储输出点云
(new pcl::PointCloud<pcl::PointXYZRGBA> ());
PointCloudEncoder->encodePointCloud (cloud, compressedData);// 压缩点云
PointCloudDecoder->decodePointCloud (compressedData, cloudOut);// 解压缩点云
viewer.showCloud (cloudOut);//可视化解压缩点云
}
}
//在压缩与解压缩过程中,因为设置compressedData为true所以在标准输出上打印出压缩率帧数等信息
编译并运行该程序
利用光盘提供的CMakeLists.txt文件,在cmake中建立工程文件,并生成相应的可执行文件,生成执行文件后,就可以运行了,在cmd中键入命令:
...>point_cloud_compression.exe
可以看到如图2所示结果,左边为实时可视化带RGB纹理信息的点云结果,用户缩放可视化结果可以看到经过压缩后点云进行了重采样,纹理信息有所丢失,但数据量有所减小,在实际应用当中需折中取舍。右边则为实时压缩信息输出,可以看出压缩的帧数、点数、压缩率等信息。
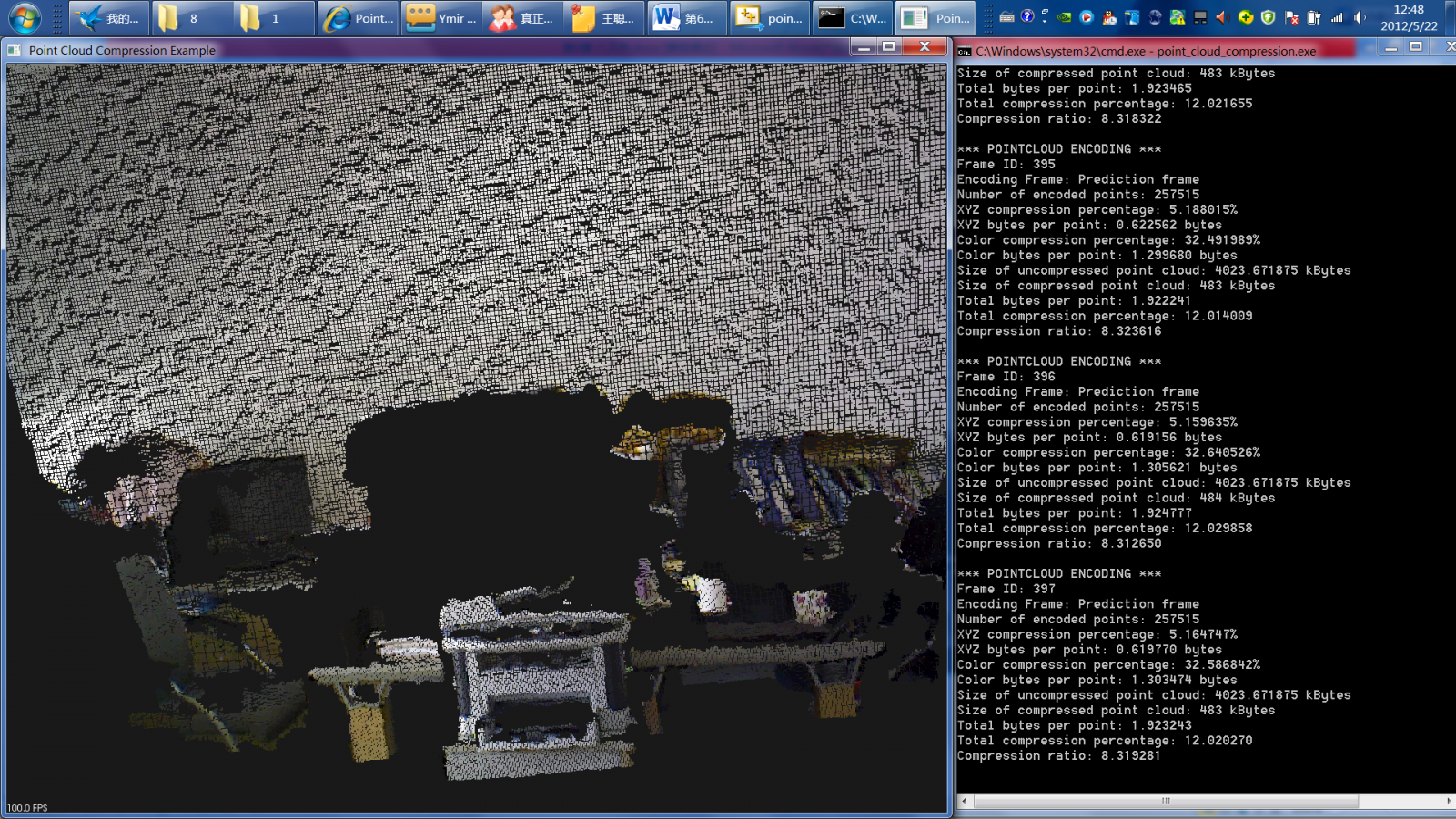
图2 点云压缩运行结果
在PCL中如何实现点云压缩(1)的更多相关文章
- 在PCL中如何实现点云压缩(2)
博客转载自:http://www.pclcn.org/study/shownews.php?lang=cn&id=125 压缩配置文件: 压缩配置文件为PCL点云编码器定义了参数集.并针对压缩 ...
- PCL中的OpenNI点云获取框架(OpenNI Grabber Framework in PCL)
从PCL 1.0开始,PCL(三维点云处理库Point Cloud Library)提供了一个通用采集接口,这样可以方便地连接到不同的设备及其驱动.文件格式和其他数据源.PCL集成的第一个数据获取驱动 ...
- PCL中outofcore模块---基于核外八叉树的大规模点云的显示
写在前面 最近公众号的活动让更多的人加入交流群,尝试提问更多的我问题,群主也在积极的招募更多的小伙伴与我一起分享,能够相互促进. 这里总结群友经常问,经常提的两个问题,并给出我的回答: (1) ...
- 基于传统方法点云分割以及PCL中分割模块
之前在微信公众号中更新了以下几个章节 1,如何学习PCL以及一些基础的知识 2,PCL中IO口以及common模块的介绍 3,PCL中常用的两种数据结构KDtree以及Octree树的介绍 ...
- PCL中的类
1. PCLBase pcl_base.h中定义了PCL中的基类PCLBase,PCL中的大部分算法都使用了其中的方法. PCLBase实现了点云数据及其索引的定义和访问. 两个主要的变量input_ ...
- PCL—低层次视觉—点云分割(基于凹凸性)
1.图像分割的两条思路 场景分割时机器视觉中的重要任务,尤其对家庭机器人而言,优秀的场景分割算法是实现复杂功能的基础.但是大家搞了几十年也还没搞定——不是我说的,是接下来要介绍的这篇论文说的.图像分割 ...
- PCL—低层次视觉—点云分割(邻近信息)
分割给人最直观的影响大概就是邻居和我不一样.比如某条界线这边是中华文明,界线那边是西方文,最简单的分割方式就是在边界上找些居民问:"小伙子,你到底能不能上油管啊?”.然后把能上油管的居民坐标 ...
- PCL—低层次视觉—点云分割(RanSaC)
点云分割 点云分割可谓点云处理的精髓,也是三维图像相对二维图像最大优势的体现.不过多插一句,自Niloy J Mitra教授的Global contrast based salient region ...
- mac中vmware tools进行磁盘压缩和vmware-tools-cli的使用方法
前言: 高高兴兴的在vmware9.0中安装了mac10.8系统,然后学习iphone开发,但是发现下载的pdf都是基于xcode3.2.5的,又在10.8上面安装3.2.5,出现“五国”无法解决,最 ...
随机推荐
- Effective java -- 7 通用程序设计
第四十五条:将局部变量的作用域最小化 第四十六条:加强版for循环优于传统for循环 第四十七条:了解和使用类库书中提到了一个生成随机数的例子.正好需要. public static void mai ...
- Data Structure Binary Tree: Print ancestors of a given binary tree node without recursion
http://www.geeksforgeeks.org/print-ancestors-of-a-given-binary-tree-node-without-recursion/ #include ...
- zabbix实现mysql数据库的监控(二)
上章我们把zabbix的服务端和客户端都部署完成了,本章接着进行两部分的设置: 1 添加对mysql数据库主机的监控 2 添加对mysql数据库的监控 一.对数据库服务器主机监控 1 创建主机 步 ...
- spring装配机制
spring容器创建bean并通过DI(依赖注入)来协调他们之间的关系,他有三种装配机制: 1. 在XML中显式配置 2. 在Java文件中显式配置 3. 隐式的bean发现机制(组件扫描)和自动装配 ...
- vue-router原理分析
本文整理总结自: https://zhuanlan.zhihu.com/p/27588422 单页面应用(SPA)的核心之一是: 更新视图而不重新请求页面, 实现这一点主要是两种方式: 1.Hash: ...
- 20145229《Java程序设计》第四次实验报告
Android开发基础 实验要求 1.基于Android Studio开发简单的Android应用并部署测试; 2.了解Android组件.布局管理器的使用: 3.掌握Android中事件处理机制. ...
- NFS指定端口,NFS缓存
nfs服务端: #编辑/etc/nfsmount.conf,在末尾添加: #RQUOTAD_PORT=30001#LOCKD_TCPPORT=30002#LOCKD_UDPPORT=30002#MOU ...
- LINQ 学习路程 -- 查询操作 Average Count Max Sum
IList<, , }; var avg = intList.Average(); Console.WriteLine("Average: {0}", avg); IList ...
- spring boot项目多环境配置文件设置
具体做法: 不同环境的配置设置一个配置文件,例如:dev环境下的配置配置在application-dev.properties中:prod环境下的配置配置在application-prod.prope ...
- java:Eclipse:Could not create the view:解决办法
Eclipse:Could not create the view: Plug-in org.eclipse.jdt.ui was unable to load class org.eclipse.j ...