Stm32串口通信(USART)
Stm32串口通信(UART)
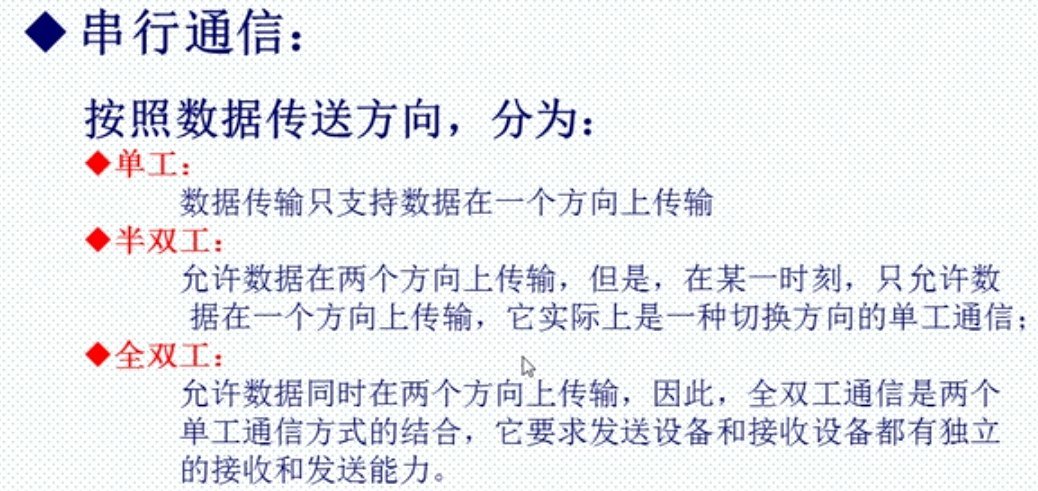
串口通信的分类
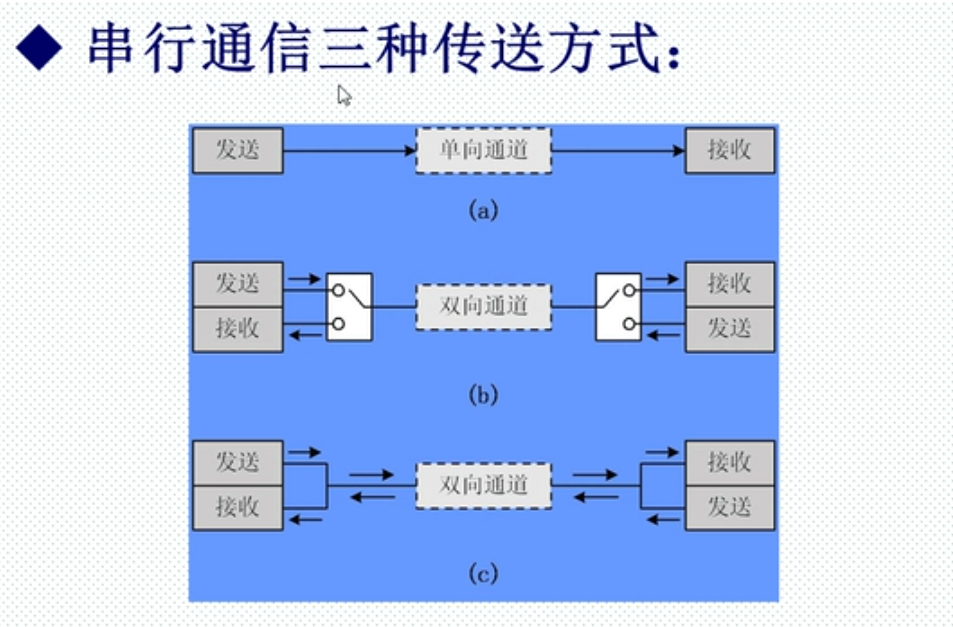
串口通信三种传递方式
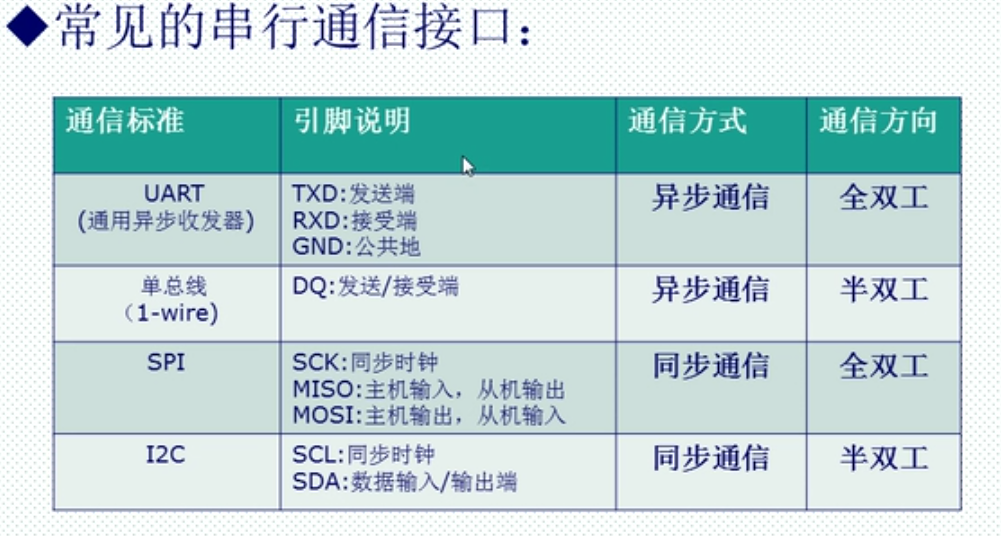
串口通信的通信方式

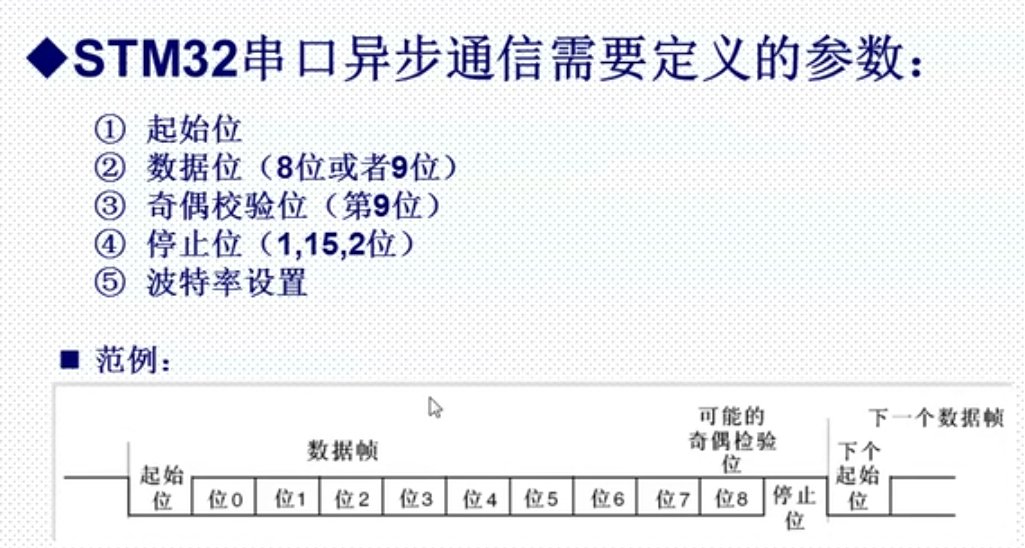
串行通信的方式: 异步通信:它用一个起始位表示字符的开始,用停止位表示字符的结束。其每帧的格式如下:
在一帧格式中,先是一个起始位0,然后是8个数据位,规定低位在前,高位在后,接下来是奇偶校验位(能省略),最后是停止位1。用这种格式表示字符,则字符能一个接一个地传送。 在异步通信中,CPU与外设之间必须有两项规定,即字符格式和波特率。字符格式的规定是双方能够在对同一种0和1的串理解成同一种意义。原则上字符格式能由通信的双方自由制定,但从通用、方便的角度出发,一般还是使用一些标准为好,如采用ASCII标准。
波特率即数据传送的速率,其定义是每秒钟传送的二进制数的位数。例如,数据传送的速率是120字符/s,而每个字符如上述规定包含10数位,则传送波特率为1200波特。 同步通信:在同步通信中,每个字符要用起始位和停止位作为字符开始和结束的标志,占用了时间;所以在数据块传递时,为了提高速度,常去掉这些标志,采用同步传送。由于数据块传递开始要用同步字符来指示,同时要求由时钟来实现发送端与接收端之间的同步,故硬件较复杂。
USART通信
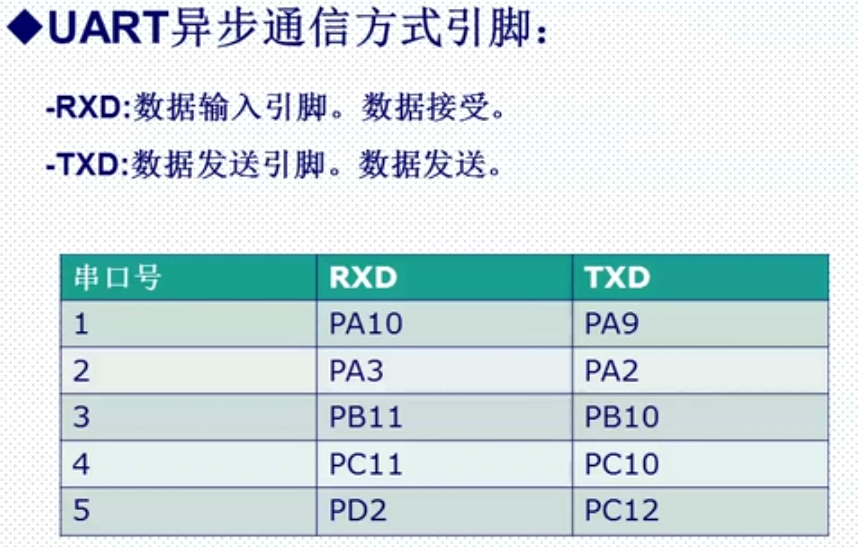
USART异步通信方式特点
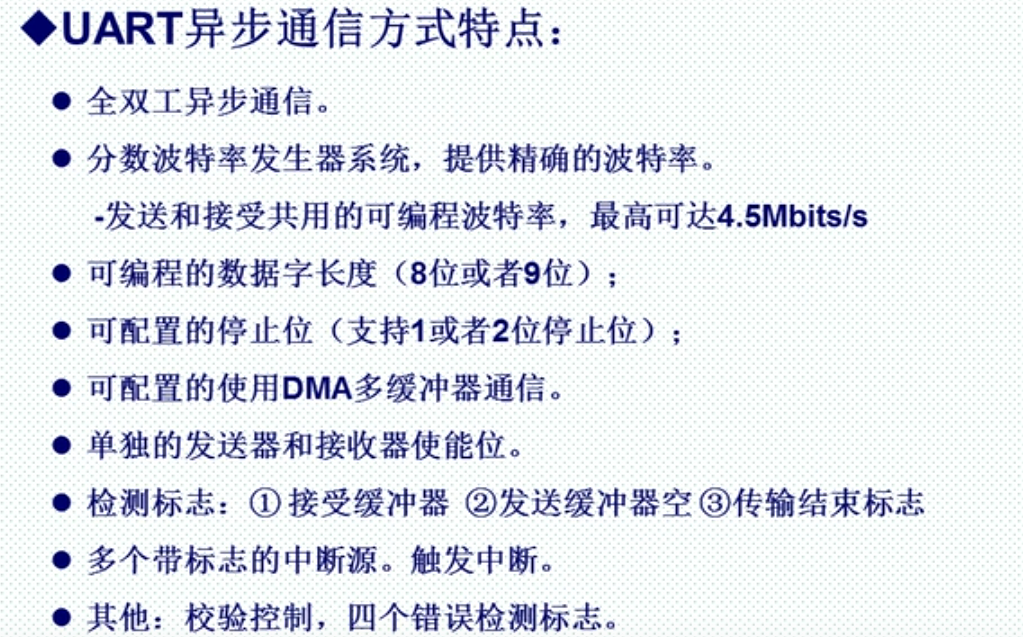
USART异步通信
串口通信示例程序
#include "stm32f10x.h" void My_USARTI_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;//定义GPIO结构体
USART_InitTypeDef USART_InitStrue;//定义USART结构体
NVIC_InitTypeDef NVIC_InitStruct;//定义NVTO结构体
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//使能GPIOA
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);//使能USART1 //GPIOA.9,复用推挽输出
GPIO_InitStructure.GPIO_Pin =GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_10MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure); //GPIOA.10上浮输入
GPIO_InitStructure.GPIO_Pin =GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_10MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure); //串口初始化
USART_InitStrue.USART_Mode= USART_Mode_Rx | USART_Mode_Tx;
USART_InitStrue.USART_BaudRate=;//波特率
USART_InitStrue.USART_HardwareFlowControl=USART_HardwareFlowControl_None;//不使用硬件流
USART_InitStrue.USART_Parity=USART_Parity_No;//不用奇偶验证
USART_InitStrue.USART_StopBits=USART_StopBits_1;//停止位
USART_InitStrue.USART_WordLength=USART_WordLength_8b;//数据位
USART_Init(USART1,&USART_InitStrue); //使能串口1
USART_Cmd(USART1,ENABLE); //开启接收中断,接收到数据就会执行中断函数
USART_ITConfig(USART1,USART_IT_RXNE,ENABLE); //中断优先级设置
NVIC_InitStruct.NVIC_IRQChannel=USART1_IRQn;//stm32f10x.h文件的顶部查找
NVIC_InitStruct.NVIC_IRQChannelCmd=ENABLE;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority=;
NVIC_InitStruct.NVIC_IRQChannelSubPriority=;
NVIC_Init(&NVIC_InitStruct); }
//中断服务函数
void USART1_IRQHandler(void)
{
u8 res;
if(USART_GetITStatus(USART1,USART_IT_RXNE))
{
//读取串口的数据
res=USART_ReceiveData(USART1);
USART_SendData(USART1,res); } } //电脑每给开发板发送一次数据,就会触发中断//接下来执行一次中断服务函数//res=USART_ReceiveData(USART1)就会接收到数据
//USART_SendData(USART1,res)又把接收到的数据发送给电脑,在串口助手就能看到
int main(void)
{
//系统中断优先级分组为2
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
My_USARTI_Init();
while()
{ } }
完整的官方示例代码
usart.h
#ifndef __USART_H
#define __USART_H
#include "stdio.h"
#include "sys.h" #define USART_REC_LEN 200 //定义最大接收字节数 200
#define EN_USART1_RX 1 //使能(1)/禁止(0)串口1接收 extern u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.末字节为换行符
extern u16 USART_RX_STA; //接收状态标记
//如果想串口中断接收,请不要注释以下宏定义
void uart_init(u32 bound);
#endif
代码
usart.c
#include "sys.h"
#include "usart.h" //如果使用ucos,则包括下面的头文件即可.
#if SYSTEM_SUPPORT_OS
#include "includes.h" //ucos 使用
#endif //////////////////////////////////////////////////////////////////
//加入以下代码,支持printf函数,而不需要选择use MicroLIB
#if 1
#pragma import(__use_no_semihosting)
//标准库需要的支持函数
struct __FILE
{
int handle; }; FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
_sys_exit(int x)
{
x = x;
}
//重定义fputc函数
int fputc(int ch, FILE *f)
{
while((USART1->SR&0X40)==);//循环发送,直到发送完毕
USART1->DR = (u8) ch;
return ch;
}
#endif /*使用microLib的方法*/
/*
int fputc(int ch, FILE *f)
{
USART_SendData(USART1, (uint8_t) ch); while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET) {} return ch;
}
int GetKey (void) { while (!(USART1->SR & USART_FLAG_RXNE)); return ((int)(USART1->DR & 0x1FF));
}
*/ #if EN_USART1_RX //如果使能了接收
//串口1中断服务程序
//注意,读取USARTx->SR能避免莫名其妙的错误
u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.
//接收状态
//bit15, 接收完成标志
//bit14, 接收到0x0d
//bit13~0, 接收到的有效字节数目
u16 USART_RX_STA=; //接收状态标记 void uart_init(u32 bound){
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟 //USART1_TX GPIOA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.9 //USART1_RX GPIOA.10初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//PA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.10 //Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority= ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = ; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器 //USART 初始化设置 USART_InitStructure.USART_BaudRate = bound;//串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式 USART_Init(USART1, &USART_InitStructure); //初始化串口1
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启串口接受中断
USART_Cmd(USART1, ENABLE); //使能串口1 } void USART1_IRQHandler(void) //串口1中断服务程序
{
u8 Res;
#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS.
OSIntEnter();
#endif
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
Res =USART_ReceiveData(USART1); //读取接收到的数据 if((USART_RX_STA&0x8000)==)//接收未完成
{
if(USART_RX_STA&0x4000)//接收到了0x0d
{
if(Res!=0x0a)USART_RX_STA=;//接收错误,重新开始
else USART_RX_STA|=0x8000; //接收完成了
}
else //还没收到0X0D
{
if(Res==0x0d)USART_RX_STA|=0x4000;
else
{
USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;
USART_RX_STA++;
if(USART_RX_STA>(USART_REC_LEN-))USART_RX_STA=;//接收数据错误,重新开始接收
}
}
}
}
#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS.
OSIntExit();
#endif
}
#endif
代码
main.c
#include "stm32f10x.h" void My_USARTI_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;//定义GPIO结构体
USART_InitTypeDef USART_InitStrue;//定义USART结构体
NVIC_InitTypeDef NVIC_InitStruct;//定义NVIC结构体 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//使能GPIOA
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);//使能USART1 //GPIOA.9,复用推挽输出
GPIO_InitStructure.GPIO_Pin =GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_10MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure); //GPIOA.10,上浮输入
GPIO_InitStructure.GPIO_Pin =GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_10MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure); //串口初始化
USART_InitStrue.USART_Mode= USART_Mode_Rx | USART_Mode_Tx;
USART_InitStrue.USART_BaudRate=;//波特率
USART_InitStrue.USART_HardwareFlowControl=USART_HardwareFlowControl_None;//不使用硬件流
USART_InitStrue.USART_Parity=USART_Parity_No;//不用奇偶验证
USART_InitStrue.USART_StopBits=USART_StopBits_1;//停止位
USART_InitStrue.USART_WordLength=USART_WordLength_8b;//数据位
USART_Init(USART1,&USART_InitStrue); //使能串口1
USART_Cmd(USART1,ENABLE); //开启接收中断,接收到数据就会执行中断函数
USART_ITConfig(USART1,USART_IT_RXNE,ENABLE); //中断优先级设置
NVIC_InitStruct.NVIC_IRQChannel=USART1_IRQn;//stm32f10x.h文件顶部查找
NVIC_InitStruct.NVIC_IRQChannelCmd=ENABLE;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority=;
NVIC_InitStruct.NVIC_IRQChannelSubPriority=;
NVIC_Init(&NVIC_InitStruct); } void USART1_IRQHandler(void)
{
u8 res;
if(USART_GetITStatus(USART1,USART_IT_RXNE))
{
//读取串口的数据
res=USART_ReceiveData(USART1);
USART_SendData(USART1,res); } } //电脑每给开发板发送一次数据,就会触发中断
//就会执行一次中断服务函数
//res=USART_ReceiveData(USART1)就会接收到数据
//USART_SendData(USART1,res)又把接收到的数据发送给电脑,在串口助手就能看到
int main(void)
{
//系统中断优先级分组为2
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
My_USARTI_Init();
while()
{ } }
代码
Stm32串口通信(USART)的更多相关文章
- STM32串口通信UART使用
STM32串口通信UART使用 uart使用的过程为: 1. 使能GPIO口和UART对应的总线时钟 2. 配置GPIO口的输出模式 3. 配置uart口相关的基本信息 4. 使能uart口的相关的中 ...
- STM32 串口通信使用奇偶校验
STM32串口通信如果使用奇偶校验,需要设置数据位长度为9bit USART_InitStructure.USART_BaudRate = 9600; USART_InitStructure.USAR ...
- stm32串口通信实验,一点笔记
第一次深入学习stm32,花了好长时间才看懂代码(主要是C语言学习不够深入),又花了段时间自己敲了一遍,然后比对教程,了解了利用中断来串口通信的设置方法. 板子是探索版f407,本实验工程把正点原子库 ...
- STM32串口通信配置(USART1+USART2+USART3+UART4) (转)
一.串口一的配置(初始化+中断配置+中断接收函数) 1 /*====================================================================== ...
- STM32串口通信USART1转USART2问题解决
使用的是STM32f103ZET6. 1.把文件main.c和usart.c中的所有usart1换成usart2 2.查看手册得知USART2的引脚是Tx->PA2,Rx->PA3,改变u ...
- STM32串口通信配置(USART1+USART2+USART3+UART4)
一.串口一的配置(初始化+中断配置+中断接收函数) 1 /*====================================================================== ...
- STM32 串口通信
1. 中断说明 TXE(Tansmit Data Register empty interrupt) - 发送数据寄存器空,产生中断.当使能TXE后,只要Tx DR空了,就会产生中断.---写寄存器D ...
- 嵌入式02 STM32 实验07 串口通信
STM32串口通信(F1系列包含3个USART和2个UART) 一.单片机与PC机串行通信研究目的和意义: 单片机自诞生以来以其性能稳定,价格低廉.功能强大.在智能仪器.工业装备以及日用电子消费产品中 ...
- 电赛菜鸟营培训(三)——STM32F103CB之串口通信
一.串口通信概念 1.缩写 USART:Universal Synchronous/Asynchronous Receiver/Transmitter 通用同步/异步接收和发送器 2.用处 (1)同步 ...
随机推荐
- ORA-00845 MEMORY_TARGET not supported on this system 的解决
本文来源:宁静致远 的<ORA-00845 MEMORY_TARGET not supported on this system 的解决> oracle11g数据库在执行dbca或者调整s ...
- nodejs之koa-router与koa-body搭配使用
简介 koa需要搭配中间件来做接口更方便,使用Koa-body & Koa-router 使用 koa2 创建接口,处理post请求 const koa=require("koa&q ...
- python(5):scipy之numpy介绍
python 的scipy 下面的三大库: numpy, matplotlib, pandas scipy 下面还有linalg 等 scipy 中的数据结构主要有三种: ndarray(n维数组), ...
- babel-cli 的使用
1.安装babel-cli npm i babel-cli -D 2.实现npm的初始化 npm init -y 3.配置package.json { "name": " ...
- Lottie 动画
#### 三方框架之Lotti使用Lottie 的使用 1.添加 Gradle 依赖 dependencies { compile 'com.airbnb.android:lottie:1.5.3'} ...
- C++ 成员初始化列表
1.什么是成员初始化列表 #include<iostream> #include<string> using namespace std; class Weapon { pri ...
- Hyper-V 替换 vmwp
要激活 Hyper-V 下的虚机 最简单的方法是用带证书的vmwp替换掉原来的 带证书的vmwp参见:http://bbs.pcbeta.com/viewthread-1408240-1-1.html ...
- [转] js前端解决跨域问题的8种方案(最新最全)
1.同源策略如下: URL 说明 是否允许通信 http://www.a.com/a.jshttp://www.a.com/b.js 同一域名下 允许 http://www.a.com/lab/a.j ...
- springboot整合Quartz实现动态配置定时任务
前言 在我们日常的开发中,很多时候,定时任务都不是写死的,而是写到数据库中,从而实现定时任务的动态配置,下面就通过一个简单的示例,来实现这个功能. 一.新建一个springboot工程,并添加依赖 & ...
- java数组知识点总结
数组是一个用来存储同一个数据类型多个元素的一个容器(数组长度是固定的,数组中存储的元素的数据类型要求一致) 1.格式: 格式1: 数据类型[] 数组名 = new 数据类型[数组长度]; 格式2: 数 ...