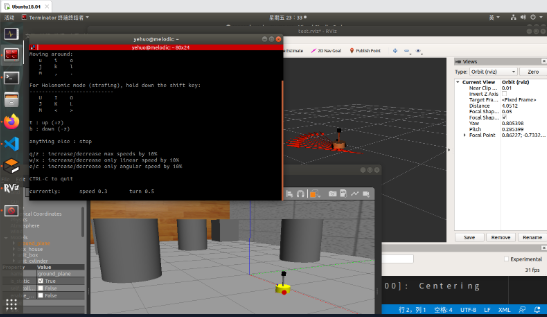
gazebo+rviz 仿真
gazebo小车模型创建及键盘操控详见之前的博客
参考链接
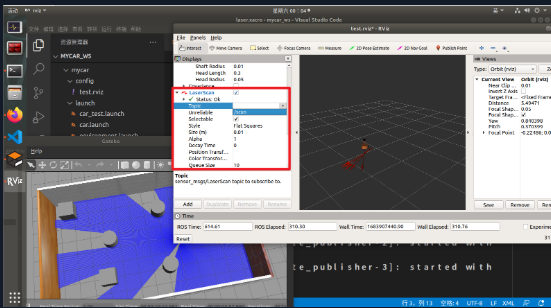
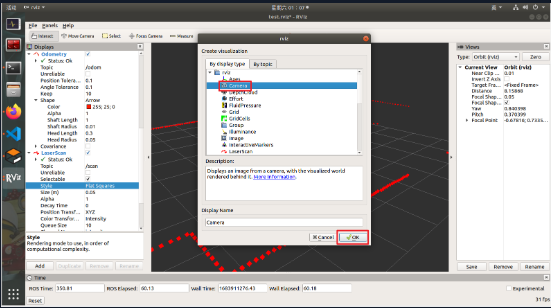
Part 1 : 里程计查看
效果图
step1: 添加需要的文件
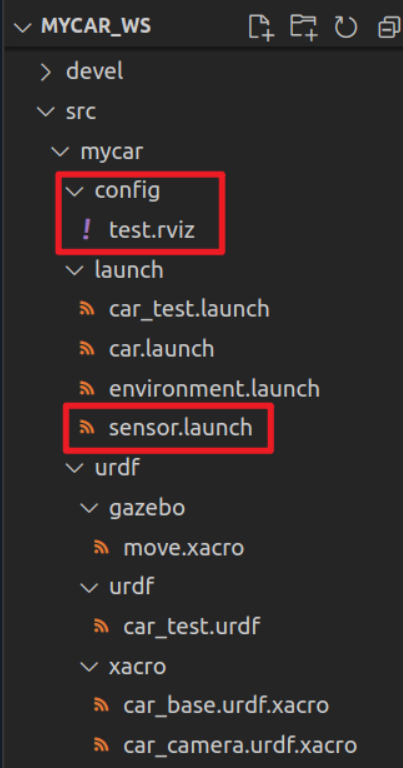
src/mycar/config/test.rviz
Panels:
- Class: rviz/Displays
Help Height: 78
Name: Displays
Property Tree Widget:
Expanded:
- /Global Options1
- /Status1
- /RobotModel1
- /TF1
- /Odometry1
- /Odometry1/Shape1
Splitter Ratio: 0.5
Tree Height: 670
- Class: rviz/Selection
Name: Selection
- Class: rviz/Tool Properties
Expanded:
- /2D Pose Estimate1
- /2D Nav Goal1
- /Publish Point1
Name: Tool Properties
Splitter Ratio: 0.5886790156364441
- Class: rviz/Views
Expanded:
- /Current View1
Name: Views
Splitter Ratio: 0.5
- Class: rviz/Time
Experimental: false
Name: Time
SyncMode: 0
SyncSource: ""
Preferences:
PromptSaveOnExit: true
Toolbars:
toolButtonStyle: 2
Visualization Manager:
Class: ""
Displays:
- Alpha: 0.5
Cell Size: 1
Class: rviz/Grid
Color: 160; 160; 164
Enabled: true
Line Style:
Line Width: 0.029999999329447746
Value: Lines
Name: Grid
Normal Cell Count: 0
Offset:
X: 0
Y: 0
Z: 0
Plane: XY
Plane Cell Count: 10
Reference Frame: <Fixed Frame>
Value: true
- Alpha: 1
Class: rviz/RobotModel
Collision Enabled: false
Enabled: true
Links:
All Links Enabled: true
Expand Joint Details: false
Expand Link Details: false
Expand Tree: false
Link Tree Style: Links in Alphabetic Order
back_wheel:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
base_footprint:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
base_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
camera:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
front_wheel:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
laser:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
left_wheel:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
right_wheel:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
support:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
Name: RobotModel
Robot Description: robot_description
TF Prefix: ""
Update Interval: 0
Value: true
Visual Enabled: true
- Class: rviz/TF
Enabled: false
Frame Timeout: 15
Frames:
All Enabled: true
Marker Scale: 1
Name: TF
Show Arrows: true
Show Axes: true
Show Names: true
Tree:
{}
Update Interval: 0
Value: false
- Angle Tolerance: 0.10000000149011612
Class: rviz/Odometry
Covariance:
Orientation:
Alpha: 0.5
Color: 255; 255; 127
Color Style: Unique
Frame: Local
Offset: 1
Scale: 1
Value: true
Position:
Alpha: 0.30000001192092896
Color: 204; 51; 204
Scale: 1
Value: true
Value: true
Enabled: true
Keep: 10
Name: Odometry
Position Tolerance: 0.10000000149011612
Shape:
Alpha: 1
Axes Length: 1
Axes Radius: 0.10000000149011612
Color: 255; 25; 0
Head Length: 0.30000001192092896
Head Radius: 0.05000000074505806
Shaft Length: 1
Shaft Radius: 0.009999999776482582
Value: Arrow
Topic: /odom
Unreliable: false
Value: true
Enabled: true
Global Options:
Background Color: 48; 48; 48
Default Light: true
Fixed Frame: odom
Frame Rate: 30
Name: root
Tools:
- Class: rviz/Interact
Hide Inactive Objects: true
- Class: rviz/MoveCamera
- Class: rviz/Select
- Class: rviz/FocusCamera
- Class: rviz/Measure
- Class: rviz/SetInitialPose
Theta std deviation: 0.2617993950843811
Topic: /initialpose
X std deviation: 0.5
Y std deviation: 0.5
- Class: rviz/SetGoal
Topic: /move_base_simple/goal
- Class: rviz/PublishPoint
Single click: true
Topic: /clicked_point
Value: true
Views:
Current:
Class: rviz/Orbit
Distance: 6.243990898132324
Enable Stereo Rendering:
Stereo Eye Separation: 0.05999999865889549
Stereo Focal Distance: 1
Swap Stereo Eyes: false
Value: false
Focal Point:
X: -0.6781591773033142
Y: 0.7335925102233887
Z: -0.1656564623117447
Focal Shape Fixed Size: true
Focal Shape Size: 0.05000000074505806
Invert Z Axis: false
Name: Current View
Near Clip Distance: 0.009999999776482582
Pitch: 0.3703985810279846
Target Frame: <Fixed Frame>
Value: Orbit (rviz)
Yaw: 0.8403980731964111
Saved: ~
Window Geometry:
Displays:
collapsed: false
Height: 967
Hide Left Dock: false
Hide Right Dock: false
QMainWindow State: 000000ff00000000fd00000004000000000000015600000329fc0200000008fb0000001200530065006c0065006300740069006f006e00000001e10000009b0000005c00fffffffb0000001e0054006f006f006c002000500072006f007000650072007400690065007302000001ed000001df00000185000000a3fb000000120056006900650077007300200054006f006f02000001df000002110000018500000122fb000000200054006f006f006c002000500072006f0070006500720074006900650073003203000002880000011d000002210000017afb000000100044006900730070006c006100790073010000003d00000329000000c900fffffffb0000002000730065006c0065006300740069006f006e00200062007500660066006500720200000138000000aa0000023a00000294fb00000014005700690064006500530074006500720065006f02000000e6000000d2000003ee0000030bfb0000000c004b0069006e0065006300740200000186000001060000030c00000261000000010000010f00000329fc0200000003fb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000041000000780000000000000000fb0000000a00560069006500770073010000003d00000329000000a400fffffffb0000001200530065006c0065006300740069006f006e010000025a000000b200000000000000000000000200000490000000a9fc0100000001fb0000000a00560069006500770073030000004e00000080000002e100000197000000030000062d0000003efc0100000002fb0000000800540069006d006501000000000000062d000002eb00fffffffb0000000800540069006d00650100000000000004500000000000000000000003bc0000032900000004000000040000000800000008fc0000000100000002000000010000000a0054006f006f006c00730100000000ffffffff0000000000000000
Selection:
collapsed: false
Time:
collapsed: false
Tool Properties:
collapsed: false
Views:
collapsed: false
Width: 1581
X: 67
Y: 27
src/mycar/launch/sensor.launch
<launch>
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find mycar)/config/test.rviz" />
<node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" output="screen" />
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" output="screen" />
</launch>
step2: 运行
在终端启动roscore
roscore
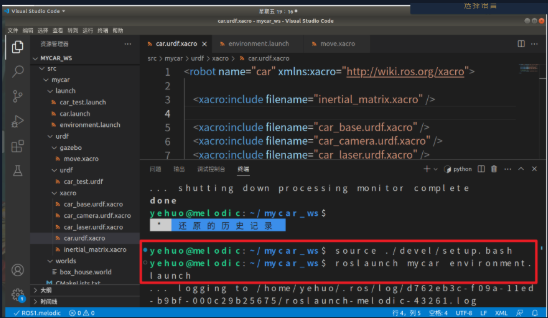
启动gazebo
source ./devel/setup.bash
roslaunch mycar environment.launch
启动rviz
source ./devel/setup.bash
roslaunch mycar sensor.launch
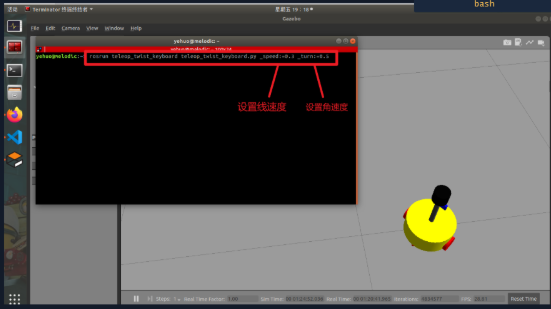
启动键盘控制
rosrun teleop_twist_keyboard teleop_twist_keyboard.py _speed:=0.3 _turn:=0.5

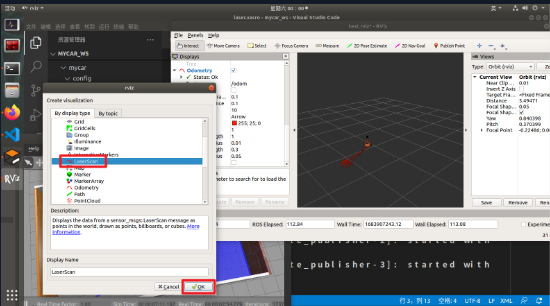
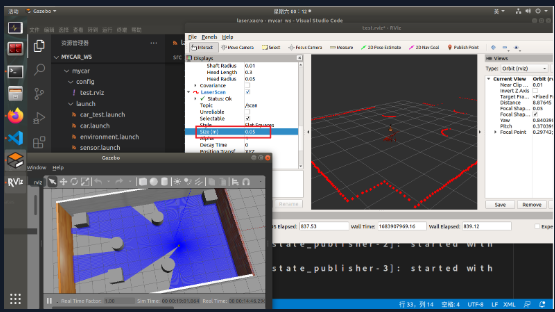
Part 2 : 雷达仿真
效果图

step1: 添加需要的文件
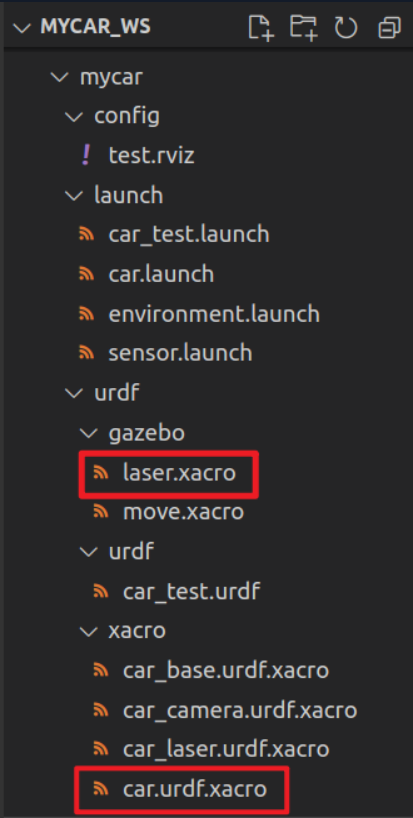
src/mycar/urdf/gazebo/laser.xacro
<robot name="my_sensors" xmlns:xacro="http://wiki.ros.org/xacro">
<!-- laser -->
<gazebo reference="laser">
<sensor type="ray" name="rplidar">
<pose>0 0 0 0 0 0</pose>
<visualize>true</visualize>
<update_rate>5.5</update_rate>
<ray>
<scan>
<horizontal>
<samples>360</samples>
<resolution>1</resolution>
<min_angle>-3</min_angle>
<max_angle>3</max_angle>
</horizontal>
</scan>
<range>
<min>0.10</min>
<max>30.0</max>
<resolution>0.01</resolution>
</range>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.01</stddev>
</noise>
</ray>
<plugin name="gazebo_rplidar" filename="libgazebo_ros_laser.so">
<topicName>/scan</topicName>
<frameName>laser</frameName>
</plugin>
</sensor>
</gazebo>
</robot>
src/mycar/urdf/xacro/car.urdf.xacro
<robot name="car" xmlns:xacro="http://wiki.ros.org/xacro">
<xacro:include filename="inertial_matrix.xacro" />
<xacro:include filename="car_base.urdf.xacro" />
<xacro:include filename="car_camera.urdf.xacro" />
<xacro:include filename="car_laser.urdf.xacro" />
<!-- move control -->
<xacro:include filename="../gazebo/move.xacro" />
<!-- laser control -->
<xacro:include filename="../gazebo/laser.xacro" />
</robot>
step2: 运行
在终端启动roscore
roscore

启动gazebo
source ./devel/setup.bash
roslaunch mycar environment.launch

启动rviz
source ./devel/setup.bash
roslaunch mycar sensor.launch
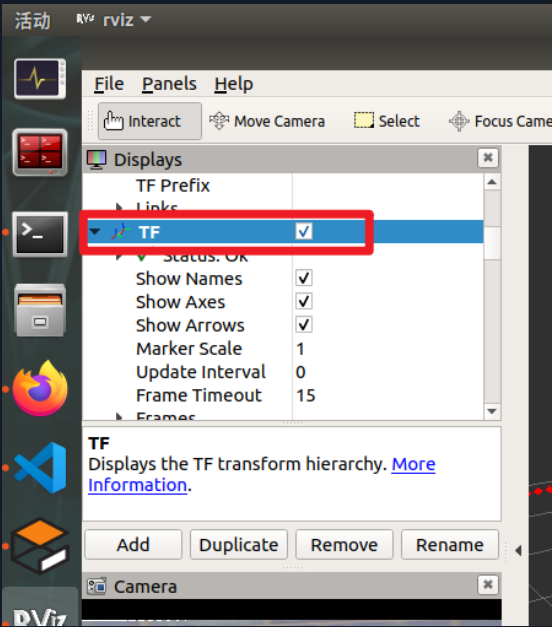
step3: 配置 rviz
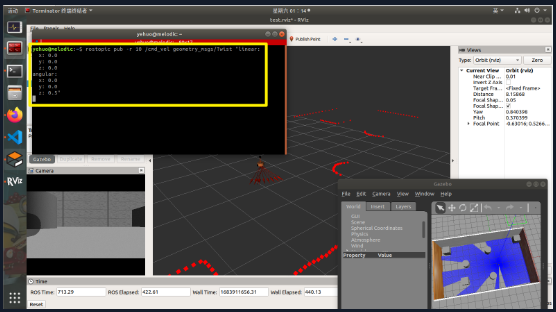
Part 3 : 摄像头仿真
效果图
step1: 添加需要的文件
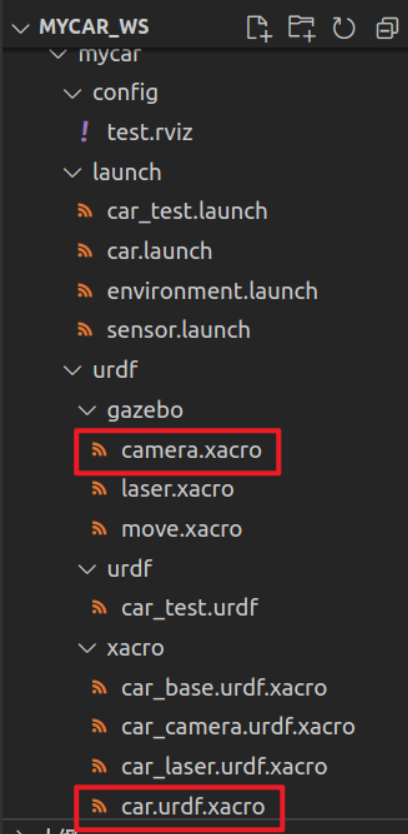
src/mycar/urdf/gazebo/camera.xacro
<robot name="my_sensors" xmlns:xacro="http://wiki.ros.org/xacro">
<gazebo reference="camera">
<sensor type="camera" name="camera_node">
<update_rate>30.0</update_rate>
<camera name="head">
<horizontal_fov>1.3962634</horizontal_fov>
<image>
<width>1280</width>
<height>720</height>
<format>R8G8B8</format>
</image>
<clip>
<near>0.02</near>
<far>300</far>
</clip>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.007</stddev>
</noise>
</camera>
<plugin name="gazebo_camera" filename="libgazebo_ros_camera.so">
<alwaysOn>true</alwaysOn>
<updateRate>0.0</updateRate>
<cameraName>/camera</cameraName>
<imageTopicName>image_raw</imageTopicName>
<cameraInfoTopicName>camera_info</cameraInfoTopicName>
<frameName>camera</frameName>
<hackBaseline>0.07</hackBaseline>
<distortionK1>0.0</distortionK1>
<distortionK2>0.0</distortionK2>
<distortionK3>0.0</distortionK3>
<distortionT1>0.0</distortionT1>
<distortionT2>0.0</distortionT2>
</plugin>
</sensor>
</gazebo>
</robot>
src/mycar/urdf/xacro/car.urdf.xacro
<robot name="car" xmlns:xacro="http://wiki.ros.org/xacro">
<xacro:include filename="inertial_matrix.xacro" />
<xacro:include filename="car_base.urdf.xacro" />
<xacro:include filename="car_camera.urdf.xacro" />
<xacro:include filename="car_laser.urdf.xacro" />
<!-- move control -->
<xacro:include filename="../gazebo/move.xacro" />
<!-- laser control -->
<xacro:include filename="../gazebo/laser.xacro" />
<!-- camera control -->
<xacro:include filename="../gazebo/camera.xacro" />
</robot>
step2: 运行
在终端启动roscore
roscore
启动gazebo
source ./devel/setup.bash
roslaunch mycar environment.launch
启动rviz
source ./devel/setup.bash
roslaunch mycar sensor.launch
启动键盘控制
rosrun teleop_twist_keyboard teleop_twist_keyboard.py _speed:=0.3 _turn:=0.5
step3: 配置 rviz

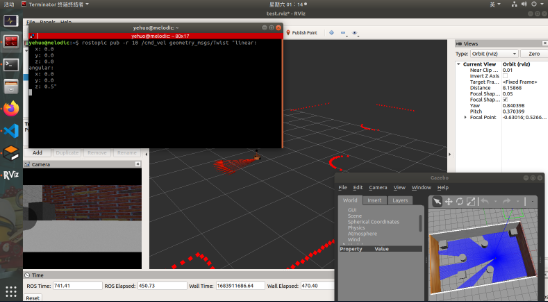
step4: 打开终端,使小车在rviz中旋转
输入以下指令
rostopic pub -r 10 /cmd_vel geometry_msgs/Twist "linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.5"
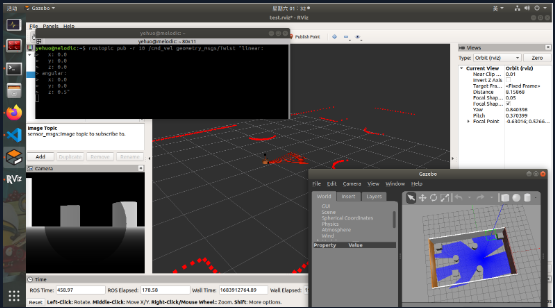
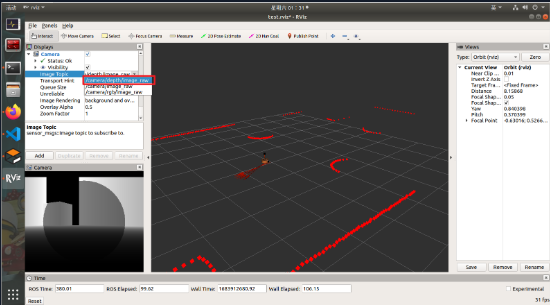
Part 4 : 深度相机仿真
效果图
step1: 添加需要的文件
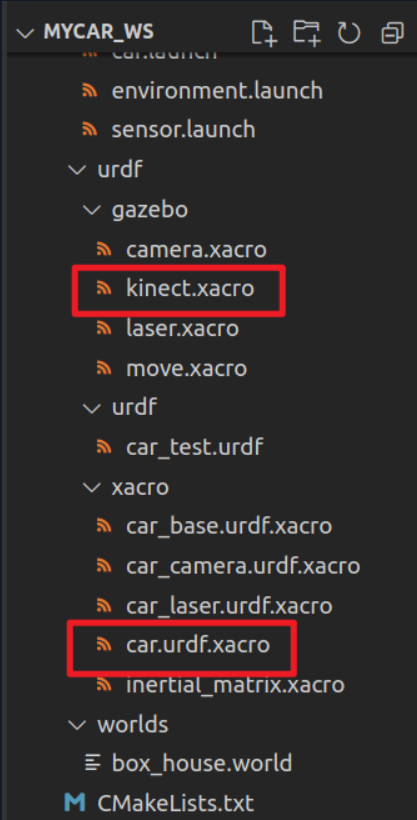
src/mycar/urdf/gazebo/kinect.xacro
<robot name="my_sensors" xmlns:xacro="http://wiki.ros.org/xacro">
<gazebo reference="support">
<sensor type="depth" name="camera">
<always_on>true</always_on>
<update_rate>20.0</update_rate>
<camera>
<horizontal_fov>${60.0*PI/180.0}</horizontal_fov>
<image>
<format>R8G8B8</format>
<width>640</width>
<height>480</height>
</image>
<clip>
<near>0.05</near>
<far>8.0</far>
</clip>
</camera>
<plugin name="kinect_camera_controller" filename="libgazebo_ros_openni_kinect.so">
<cameraName>camera</cameraName>
<alwaysOn>true</alwaysOn>
<updateRate>10</updateRate>
<imageTopicName>rgb/image_raw</imageTopicName>
<depthImageTopicName>depth/image_raw</depthImageTopicName>
<pointCloudTopicName>depth/points</pointCloudTopicName>
<cameraInfoTopicName>rgb/camera_info</cameraInfoTopicName>
<depthImageCameraInfoTopicName>depth/camera_info</depthImageCameraInfoTopicName>
<frameName>support</frameName>
<baseline>0.1</baseline>
<distortion_k1>0.0</distortion_k1>
<distortion_k2>0.0</distortion_k2>
<distortion_k3>0.0</distortion_k3>
<distortion_t1>0.0</distortion_t1>
<distortion_t2>0.0</distortion_t2>
<pointCloudCutoff>0.4</pointCloudCutoff>
</plugin>
</sensor>
</gazebo>
</robot>
src/mycar/urdf/xacro/car.urdf.xacro
<robot name="car" xmlns:xacro="http://wiki.ros.org/xacro">
<xacro:include filename="inertial_matrix.xacro" />
<xacro:include filename="car_base.urdf.xacro" />
<xacro:include filename="car_camera.urdf.xacro" />
<xacro:include filename="car_laser.urdf.xacro" />
<!-- move control -->
<xacro:include filename="../gazebo/move.xacro" />
<!-- laser control -->
<xacro:include filename="../gazebo/laser.xacro" />
<!-- camera control -->
<xacro:include filename="../gazebo/camera.xacro" />
<!-- kinect control -->
<xacro:include filename="../gazebo/kinect.xacro" />
</robot>
step2: 运行
在终端启动roscore
roscore
启动gazebo
source ./devel/setup.bash
roslaunch mycar environment.launch

启动rviz
source ./devel/setup.bash
roslaunch mycar sensor.launch
启动键盘控制
rosrun teleop_twist_keyboard teleop_twist_keyboard.py _speed:=0.3 _turn:=0.5

step3: 配置 rviz
step4: 打开终端,使小车在rviz中旋转
输入以下指令
rostopic pub -r 10 /cmd_vel geometry_msgs/Twist "linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.5"
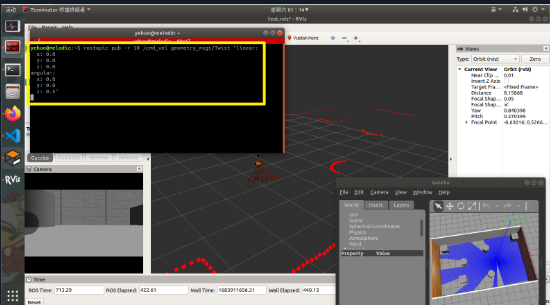
Part 5 : 深度相机仿真(点云)
效果图

step1: 添加需要的文件

src/mycar/urdf/gazebo/kinect.xacro
<robot name="my_sensors" xmlns:xacro="http://wiki.ros.org/xacro">
<gazebo reference="support">
<sensor type="depth" name="camera">
<always_on>true</always_on>
<update_rate>20.0</update_rate>
<camera>
<horizontal_fov>${60.0*PI/180.0}</horizontal_fov>
<image>
<format>R8G8B8</format>
<width>640</width>
<height>480</height>
</image>
<clip>
<near>0.05</near>
<far>8.0</far>
</clip>
</camera>
<plugin name="kinect_camera_controller" filename="libgazebo_ros_openni_kinect.so">
<cameraName>camera</cameraName>
<alwaysOn>true</alwaysOn>
<updateRate>10</updateRate>
<imageTopicName>rgb/image_raw</imageTopicName>
<depthImageTopicName>depth/image_raw</depthImageTopicName>
<pointCloudTopicName>depth/points</pointCloudTopicName>
<cameraInfoTopicName>rgb/camera_info</cameraInfoTopicName>
<depthImageCameraInfoTopicName>depth/camera_info</depthImageCameraInfoTopicName>
<frameName>support_depth</frameName>
<baseline>0.1</baseline>
<distortion_k1>0.0</distortion_k1>
<distortion_k2>0.0</distortion_k2>
<distortion_k3>0.0</distortion_k3>
<distortion_t1>0.0</distortion_t1>
<distortion_t2>0.0</distortion_t2>
<pointCloudCutoff>0.4</pointCloudCutoff>
</plugin>
</sensor>
</gazebo>
</robot>
src/mycar/launch/sensor.launch
<launch>
<!-- 添加点云坐标系到kinect连杆坐标系的变换 -->
<node pkg="tf2_ros" name="static_transform_publisher" type="static_transform_publisher" args="0 0 0 -1.57 0 -1.57 /support /support_depth" />
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find mycar)/config/test.rviz" />
<node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" output="screen" />
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" output="screen" />
</launch>
step2: 运行
在终端启动roscore
roscore

启动gazebo
source ./devel/setup.bash
roslaunch mycar environment.launch
启动rviz
source ./devel/setup.bash
roslaunch mycar sensor.launch
step3: 配置 rviz

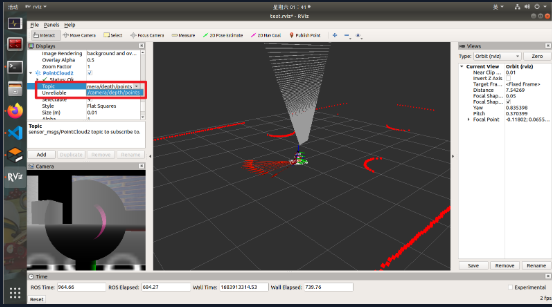
step4: 打开终端,使小车在rviz中旋转
输入以下指令
rostopic pub -r 10 /cmd_vel geometry_msgs/Twist "linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.3"
gazebo+rviz 仿真的更多相关文章
- 【探索之路】机器人篇(5)-Gazebo物理仿真环境搭建_让机器人运动起来
如果完成了前两步,那么其实我们已经可以去连接我们的现实中的机器人了. 但是,做机器人所需要的材料还没有到,所以我们这里先在电脑平台上仿真一下.这里我们用到的就算gazebo物理仿真环境,他能很好的和R ...
- 多指灵巧手MoveIt!与Gazebo联合仿真框架搭建
至于为什么叫框架,一是因为灵巧手的3维模型没有按照基本的设计要求画,正常来说,设计机器人机构之前应该设计好机构需要多少个自由度/DOF,每个自由度是旋转/revolute类型还是滑移/prismati ...
- Learning ROS for Robotics Programming Second Edition学习笔记(十) indigo Gazebo rviz slam navigation
中文译著已经出版,详情请参考:http://blog.csdn.net/ZhangRelay/article/category/6506865 moveit是书的最后一章,由于对机械臂完全不知,看不懂 ...
- ROS(indigo)国外开源示例包括多机器人控制等基于V-Rep和Gazebo的仿真
ROS(indigo)国外开源示例包括多机器人的V-Rep和Gazebo仿真等 1 micros_swarm_framework 使用超级经典的stage. http://wiki.ros.org/m ...
- Learning ROS for Robotics Programming Second Edition学习笔记(九) indigo Gazebo rviz slam navigation
中文译著已经出版,详情请参考:http://blog.csdn.net/ZhangRelay/article/category/6506865 书中三维环境gazebo,slam的仿真例子 --$ r ...
- ROS进阶学习手记 7.2 -- RViz仿真实例2:Create SmartCar
上一节玩了 exbot 在RViz里的仿真控制,这里我们用urdf文件写个自己的小车模型,ref: http://blog.csdn.net/hcx25909/article/details/8904 ...
- ROS进阶学习手记 7 -- RViz仿真实例1
[任务2]: 用simulator: RViz 工具,完成对小车的建模,名字drive RViz = dvrv, 用 dvrv_node 发布topic和数据格式,向它发送位置指令,使它能接受 ...
- 安卓手机与ROS通信遥控Gazebo中仿真机器人小车运动(ROS_indigo)
首先,先列出需要用到的一些文件: Gazebo中机器人模型及说明: http://wiki.ros.org/grizzly_simulator https://github.com/g/grizzly ...
- ROS机器人程序设计(原书第2版)补充资料 (柒) 第七章 3D建模与仿真 urdf Gazebo V-Rep Webots Morse
ROS机器人程序设计(原书第2版)补充资料 (柒) 第七章 3D建模与仿真 urdf Gazebo V-Rep Webots Morse 书中,大部分出现hydro的地方,直接替换为indigo或ja ...
- ROS和Gazebo进行机器人仿真(二)
一.在Gazebo中使用ROS控制器 在本节中,我们将讨论如何在Gazebo中让机器人的每个关节运动. 为了让关节动起来,我们需要分配一个ROS控制器,尤其是,我们需要为每个关节连上一个与transm ...
随机推荐
- Qt音视频开发1-vlc解码播放
一.前言 最开始接触视频监控这块的时候,用的就是vlc作为解码的内核,主要是因为vlc使用简单方便,直接传入一个句柄即可,简单几行代码就可以实现一个视频流播放,很适合初学者使用,也推荐初学者用qt+v ...
- KES的执行计划分析与索引优化
今天我们继续探讨国产数据库KES的相关内容,本次的讨论重点将放在SQL优化的细节上.作为Java开发人员,我们通常并不需要深入了解数据库的底层实现细节,而是更多地关注如何提升应用性能与数据库的交互效率 ...
- vue el-select封装一个滚动加载更多下拉选项的自定义指令
没有什么讲究,直接上代码 模板部分 <el-select v-model="operator" filterable remote size="small" ...
- SpringBoot+SpringSecurity+JWT整合实现单点登录SSO史上最全详解
一.什么是单点登陆 单点登录(Single Sign On),简称为 SSO,是目前比较流行的企业业务整合的解决方案之一.SSO的定义是在多个应用系统中,用户只需要登录一次就可以访问所有相互信任的应用 ...
- Docker容器的原理、特征、基本架构、与应用场景
什么是容器? 一句话概括容器:容器就是将软件打包成标准化单元,以用于开发.交付和部署. 容器镜像是轻量的.可执行的独立软件包 ,包含软件运行所需的所有内容:代码.运行时环境.系统工具.系统库和设置. ...
- Linux开发帮助参考
在开发Linux系统下面软件时常常需要查阅手册,但是如果你的开发平台不是Linux系统,那你无法丝滑使用man手册,这里推荐一些方便的Linux开发手册. 手册: 在线man手册:Linux Man ...
- 关于toString()的小细节
3. toString()方法3.1 toString()的使用: 1. 当我们输出一个对象的引用时,实际上就是调用当前对象的toString() * * 2. Object类中toString()的 ...
- 在nginx上搭建php服务
不同的操作系统会有不一样 我这里用的是centos系统 首先下载 yum install php php-fpm php-mysqlnd php-gd php-mbstring 其次我们需要修改配置文 ...
- 学弟一看就会的RDKX5模型转换及部署,你确定不学?
作者:SkyXZ CSDN:SkyXZ--CSDN博客 博客园:SkyXZ - 博客园 宿主机环境:WSL2-Ubuntu22.04+Cuda12.6.D-Robotics-OE 1.2.8.Ubun ...
- 认识soui4js(第3篇):使用C/C++开发扩展模块
首先需要明确:JS代码本身不具备直接调用系统API的能力,JS代码能调用什么功能,都依赖于其它扩展模块提供了什么样的接口. soui4js模块将soui的界面能力作为一个js模块导出到了js中,使得j ...