qt开发ROS gui 遇到:global.h:1087:4: error: #error "You must build your code with position independent code if Qt was built with -reduce-relocations. "......
具体错误如下:
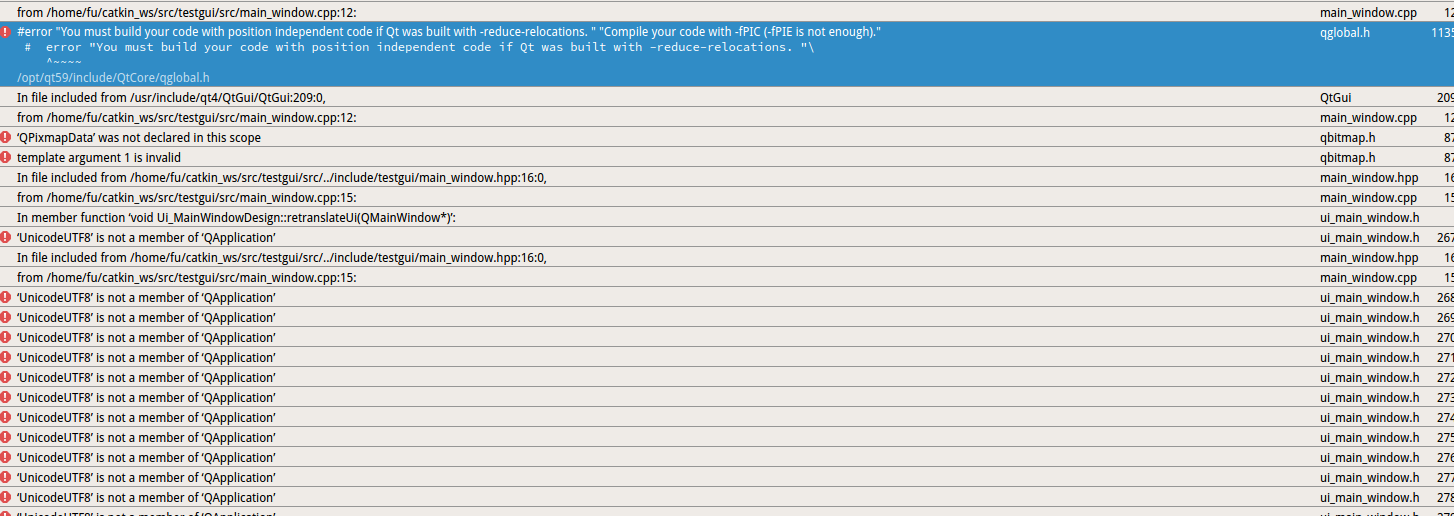
一共出现38个错误
这个错误是在导入cmakelists.txt时产生的,其实不是工程本身的问题,是因为我卸载ros,再重新安装ros的过程中把qtcreator的部分包给删除了,导致qtcreator中没有了创建ros工程的项目。如下:

所以在重新安装qtcreator后问题就解决了。
安装过程:(ubuntu14.04)
sudo add-apt-repository ppa:levi-armstrong/qt-libraries-trusty
sudo add-apt-repository ppa:levi-armstrong/ppa
sudo apt-get update && sudo apt-get install qt57creator-plugin-ros
qt开发ROS gui 遇到:global.h:1087:4: error: #error "You must build your code with position independent code if Qt was built with -reduce-relocations. "......的更多相关文章
- qt开发ROS gui界面环境配置过程总结
这段时间花了点时间配置了在qtcreator5.9.1上开发ros gui界面的环境,终于可以实现导入工程,插断点调试了.总结起来需要注意以下几点: 1.安装插件ros_qtc_plugin,ROS与 ...
- QT 开发ros gui过程中遇到:error: catkin_package() include dir 'include' does not exist relative to '/home/jun/catkin_ws/src/qt_ros_test' /opt/ros/kinetic/share/catkin/cmake/catkin_package.cmake:102 (_catkin_p
这是因为在ros工作空间的包中没有include文件夹造成的,所以在该路径下创建include的文件夹,问题就解决了.
- qt开发ROS遇到这个问题 find_package(catkin) failed. catkin was neither found in the workspace nor in the CMAKE_PREFIX_PATH...
为了实现用Qt开发ROS界面开发环境,我几乎参阅了网上所有的配置教程,安装了多个版本的qt,在ubuntu14.04和ubuntu16.04上分别进行了配置,最后都成功了.不得不说的是用QTCREAT ...
- ubuntu16.04使用Qt开发ROS
本文介绍一种Qt下进行ROS开发的完美方案,使用的是ros-industrial的Levi-Armstrong在2015年12月开发的一个Qt插件ros_qtc_plugin,这个插件使得Qt“新建项 ...
- QT开发ROS遇到问题:execute_process(/usr/bin/python"/home/fu/catkin_ws/build/catkin_genetated/generate_cached_setup.py)..........
具体如上图显示,网上给的方法是重装ros和重新创建ROS工作空间.经过这样做以后发现问题依然存在. 最后考虑可能是没有加载ROS的环境变量.(我的qtcreator中已经有了创建ros工程的项目,但是 ...
- ROS:使用Qt Creator创建GUI程序(一)
开发环境: Ubuntu14.04 ROS indigo version Qt Creator 3.0.1 based on Qt 5.2.1 步骤如下:(按照下面命令一步步来,亲测可行) (一)安装 ...
- 使用 PySide2 开发 Maya 插件系列一:QT Designer 设计GUI, pyside-uic 把 .ui 文件转为 .py 文件
使用 PySide2 开发 Maya 插件系列一:QT Designer 设计GUI, pyside-uic 把 .ui 文件转为 .py 文件 前期准备: 安装 python:https://www ...
- 基于Qt搭建ROS开发环境
参考的博客: http://blog.csdn.net/u013453604/article/details/52186375 http://blog.csdn.net/dxuehui/article ...
- ROS学习笔记八:基于Qt搭建ROS开发环境
1 前言 本文介绍一种Qt下进行ROS开发的完美方案,使用的是ros-industrial的Levi-Armstrong在2015年12月开发的一个Qt插件ros_qtc_plugin,这个插件使得Q ...
随机推荐
- 【python之路38】Python正则表达式匹配反斜杠“\”
一.引入 在学习了Python特殊字符和原始字符串之后,我觉得答案应该是这样的: 1)普通字符串:'\\'2)原始字符串:r'\'但事实上在提取诸如“3\8”反斜杠之前的数字时,我屡次碰壁,始终得不到 ...
- 【python之路33】开发模式单例模式及简单的服务器请求框架原理
1.单例模式指的是创建单个实例,例如:数据库连接池中包含10个数据库连接,用户访问数据时随机从连接池中拿出一个进行连接,其他用户再次访问时不再创建对象进行连接 #!usr/bin/env python ...
- LUOGU P1937 [USACO10MAR]仓配置Barn Allocation
传送门 解题思路 扫了一眼觉得是贪心+线段树,结果贪心的时候刚开始按区间长度排的序..这还有82分,后来叉了自己,换成按右端点排序过了. 代码 #include<iostream> #in ...
- POJ1151 离散化求矩形面积的并
/*第一道离散化的题目,虽然是水题,不过还是很高兴...*/ #include<cstdio> #include<algorithm> #include<cstring& ...
- jeecg流程梳理学习
jeecg 流程梳理 角色admin 管理员 fgld学校分管领导 bgs学校办公室 xbld系部领导 xbky系部科员jxky bmld部门领导 发文申请applyUserIdadmin${assi ...
- Java是如何实现跨平台的
一.Java是如何实现跨平台的 1.我们编写的Java源码,编译后会生成一种 .class 文件,称为字节码文件 2.Java虚拟机JVM就是负责将字节码文件翻译成特定平台下的机器码然后运行.也就是说 ...
- nginx在win系统下的安装配置与tomcat集成springmvc框架
先来一个常用命令 验证配置是否正确: nginx -t 查看Nginx的版本号:nginx -V 启动Nginx:start nginx 快速停止或关闭Nginx:nginx -s stop 正常停止 ...
- JAVA ——int 类型除法保留两位小数
@Test public void txfloat() { // TODO 自动生成的方法存根 int a=9; int b=7; DecimalFormat df=new DecimalFormat ...
- day18 9.转账汇款案例(1)
- Vue--findIndex方法的使用原理
原理: // 根据id得到下标 // 默认去遍历list集合,将集合中的每个元素传入到function的item里, var index = this.list.findIndex(function( ...