改进初学者的PID-测量的比例介绍
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助。作者Brett Beauregard的原文网址:http://brettbeauregard.com/blog/2017/06/introducing-proportional-on-measurement/
已经有相当长的一段时间了,但我终于更新了Arduino PID库。我添加的是一个几乎未知的功能,但我认为这将是对爱好者社区的利好。它被称为 "测量的比例" (简称 PonM)。
1、为什么你应该关心

有一些进程被称为“集成进程”。在这些过程中,PID的输出控制输入的变化率。在工业中,这些只占所有过程的一小部分,但在业余爱好领域,这些家伙无处不在:真空低温烹饪、线性幻灯片和3D打印机挤出机温度控制都是这类过程的例子。
这些过程令人沮丧的是,使用传统的 PI 或 PID 控制,它们会超过设定值。不是有时,而是总是:
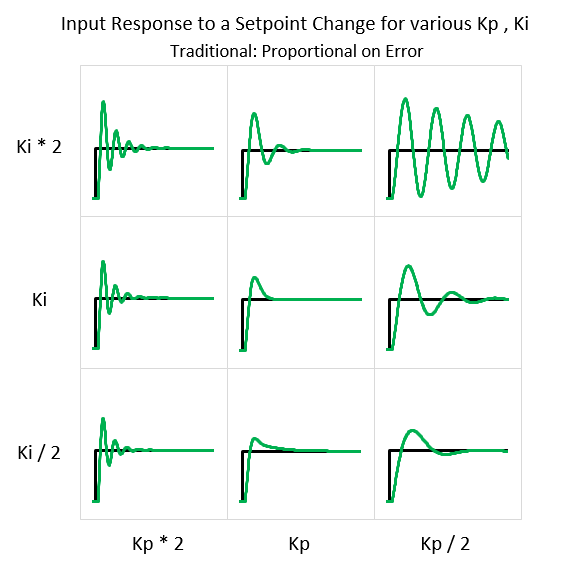
如果你不知道这件事,这可能会让你抓狂。您可以永远调整调优参数,超调仍然存在;基础数学就是这样。测量的比例改变了基础数学。因此,在不发生超调的情况下,可以找到一组调优参数:
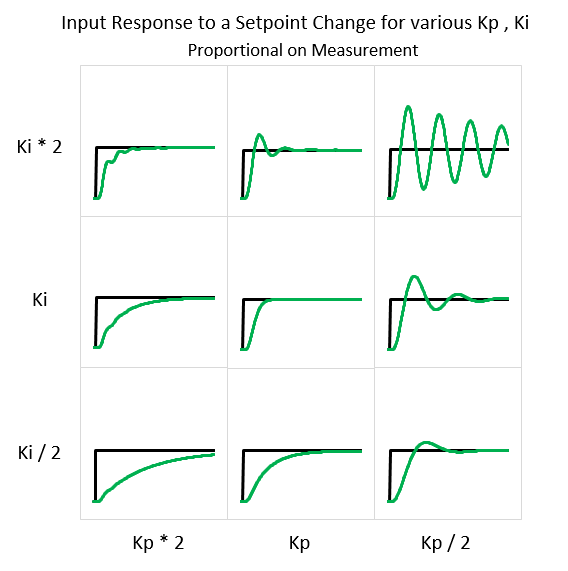
超调仍然可以肯定,但这并非不可避免。有了 PonM 和正确的整定参数,那个低温烹饪或线性滑块就可以直接延伸到设定值,而不是超过设定值。
2、那么什么是测量的比例呢?
与基于测量的微分类似,PonM 改变了比例项所关注的内容。比例项采用PID 输入的当前值代替偏差进行计算。
基于偏差的比例:

基于测量的比例:

与基于测量的微分不同,它对性能的影响是巨大的。对于 DonM,微分项仍然有相同的作用:抵制急剧的变化,从而抑制由P和I比例测量驱动的振荡,另一方面,从根本上改变比例项的作用。它不是像I一样的驱动力,而是像 D 一样成为阻力的力量。这意味着,对于PonM,一个更大的 Kp 将使您的控制器更加保守。
3、很好。但这如何消除超调呢?
要理解这个问题并修复它,看看不同的项以及它们对整个PID输出的贡献是很有帮助的。下面是对使用传统 PID 的集成进程 (真空低温烹饪) 的设定值更改的响应:
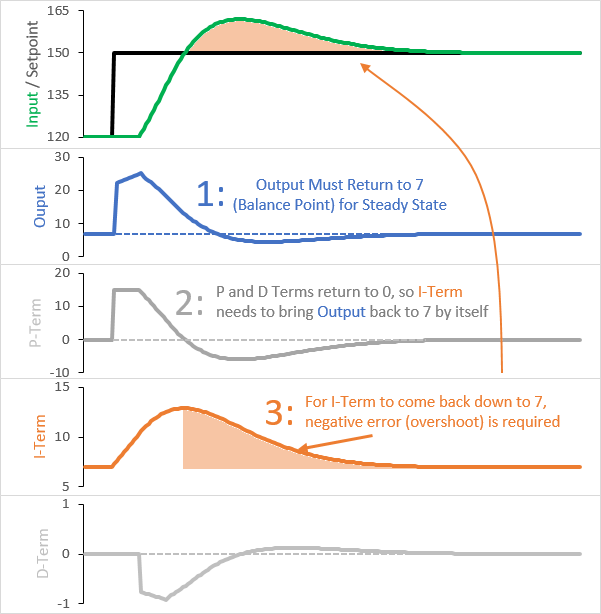
需要注意的两大事项是:
- 当我们处于设定值时,积分项是总体输出的唯一贡献者。
- 即使起点和终点的设定值不同,输出也会返回到相同的值。此值通常称为“平衡点“:导致0输入斜率的输出。对于真空低温烹饪来说,这相当于足够的热量来补偿周围的热损失。
在这里,我们可以看到为什么会发生超调,而且总是会发生。当设定值第一次更改时,偏差将导致积分项的增长。为了使进程在新的设定值保持稳定,输出将需要返回到平衡点。要做到这一点,唯一的办法就是积分项收缩。发生这种情况的唯一方法是负误差,只有在超过设定值时才会发生。
4、PonM改变了游戏规则
下面是使用基于测量的比例 (和相同的调谐参数) 控制的相同的真空低温烹饪:
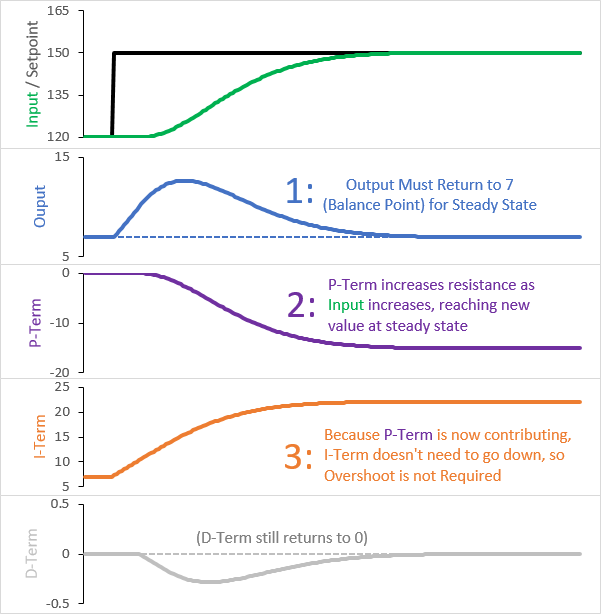
在这里,您应该注意到:
- P项现在提供了一个阻力。输入越高,它就负的越多。
- P项在新的设定值变为零之前,它会一直有值。
关键是P项不会返回到0。这意味着I项不必单独返回到平衡点。P和I一起可以将输出返回到平衡点,而无需收缩I项。因为它不需要收缩,所以不存在超调。
5、如何在新的 PID 库中使用它
如果您已准备好尝试 "测量的比例",并且安装了最新版本的PID库,则设置它是相当容易的。使用 PonM 的主要方法是在重载构造函数中指定它:

如果要在运行时在 PonM 和 PonE 之间切换,则 "设置" 函数也会重载:

您只需要在需要切换时调用重载方法。否则,您可以使用常规的设置调整功能,它将记住您的选择。
欢迎关注:

改进初学者的PID-测量的比例介绍的更多相关文章
- 改进初学者的PID-测量的比例编码
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助.作者Brett Beaure ...
- 改进初学者的PID-介绍
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助.作者Brett Beaure ...
- PID控制器(比例-积分-微分控制器)- I
形象解释PID算法 小明接到这样一个任务: 有一个水缸点漏水(而且漏水的速度还不一定固定不变),要求水面高度维持在某个位置,一旦发现水面高度低于要求位置,就要往水缸里加水. 小明接到任务后就一直守在水 ...
- 改进初学者的PID-正反作用
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助.作者Brett Beaure ...
- 改进初学者的PID-修改整定参数
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助.作者Brett Beaure ...
- 改进初学者的PID-采样时间
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助.作者Brett Beaure ...
- PID控制器(比例-积分-微分控制器)- IV
调节/测量放大电路电路图:PID控制电路图 如图是PlD控制电路,即比例(P).积分(I).微分(D)控制电路. A1构成的比例电路与环路增益有关,调节RP1,可使反相器的增益在0·5一∞范围内变化; ...
- 改进初学者的PID-积分饱和
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助.作者Brett Beaure ...
- 改进初学者的PID-初始化
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助.作者Brett Beaure ...
随机推荐
- Python+Selenium+Appium对APP进行UI自动化测试
1. 安装Python3.7版本 pythonjava的JDK java -version javac nodejs node --versionappium 若nodejs安装完毕,使用npm安装a ...
- jquery 子元素 后代元素 兄弟元素 相邻元素
<!DOCTYPE html> <html> <head> <meta http-equiv="Content-type" content ...
- Codeforces C. Maximum Value(枚举二分)
题目描述: Maximum Value time limit per test 1 second memory limit per test 256 megabytes input standard ...
- Windows环境下安装和使用nginx1.16.0
nginx是一款开源的HTTP服务器和反向代理服务器,nginx可以作为Web服务器提供HTTP访问功能,类似于Apache.IIS等.目前nginx已经在国内外很多网站作为Web服务器或反向代理服务 ...
- python面试题&练习题之嵌套循环
1.打印如下结果: 1*5=5 2*10=20 3*15=45 ... 10*50=500 for i in range(1,11): print(str(i)+'x'+str((i*5))+'='+ ...
- 【批处理】choice命令,call 命令,start 命令,rem
[1]choice命令简介 使用此命令可以提示用户输入一个选择项,根据用户输入的选择项再决定执行具体的过程. 使用时应该加/c:参数,c: 后应写提示可输入的字符或数字,之间无空格.冒号是可选项. 使 ...
- dinoql 使用graphql 语法查询javascript objects
dinoql 是一个不错的基于graphql 语法查询javascript objects 的工具包,包含以下特性 graphql 语法(很灵活) 安全的访问(当keys 不存在的时候,不会抛出运行时 ...
- Binding a Xamarin.Forms WebView to ReactiveUI View Model using Custom Type Converters
引用:https://jamilgeor.com/binding-a-xamarin-forms-webview-to-reactiveui-view-model-using-custom-type- ...
- 「ZJOI2019」Minmax搜索
传送门 Solution 叶子节点的变化区间是连续的,可得知非叶子节点的权值变化区间也是连续的 由此可知,\(W\)的变化值的可行域也是连续的,所以只需要看它能否变为\(W+1\)或\(W-1\) 对 ...
- 【算法编程 C++ python】单链表反序输出
题目描述 输入一个链表,从尾到头打印链表每个节点的值. 以下方法仅仅实现了功能,未必最佳.在牛客网测试, C++:3ms 480k Python:23ms 5732k /** * struct L ...