c语言数字图像处理(五):空间滤波
空间滤波原理
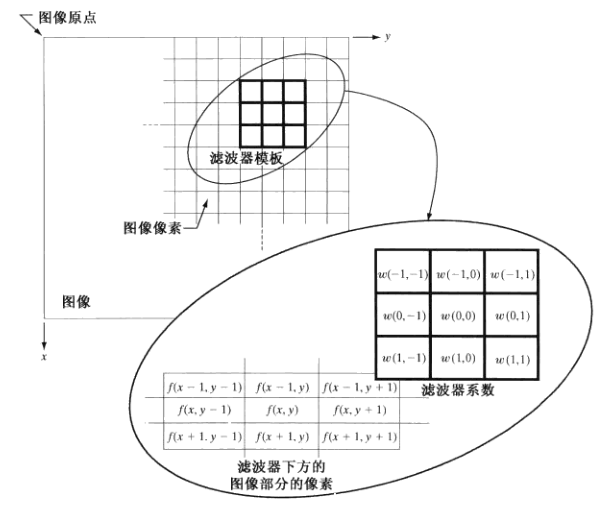
使用大小为m*n的滤波器对大小为M*N的图像进行线性空间滤波,将滤波器模板乘以图像中对应灰度值,相加得模板中心灰度值

a = (m-1)/2, b = (n-1)/2
若f(x+s, y+t)不在原图内,补0
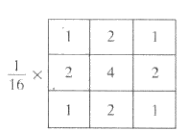
平滑线性滤波器
滤波过程

分母为滤波器模板和
代码实现
int is_in_array(short x, short y, short height, short width)
{
if (x >= && x < width && y >= && y < height)
return ;
else
return ;
} /*
* element
* v0 v1 v2
* v3 v4 v5
* v6 v7 v8
*
*/
void filtering(short** in_array, short** out_array, long height, long width)
{
short value[]; /* linear filtering */
short sum;
for (int i = ; i < ARRAY_SIZE; i++)
for (int j = ; j < ARRAY_SIZE; j++)
sum += average[i][j]; for (int i = ; i < height; i++){
for (int j = ; j < width; j++){
value[] = is_in_array(j-, i-, height, width) ? in_array[i-][j-] : ;
value[] = is_in_array(j, i-, height, width) ? in_array[i-][j] : ;
value[] = is_in_array(j+, i-, height, width) ? in_array[i-][j+] : ;
value[] = is_in_array(j-, i, height, width) ? in_array[i][j-] : ;
value[] = in_array[i][j];
value[] = is_in_array(j+, i, height, width) ? in_array[i][j+] : ;
value[] = is_in_array(j-, i+, height, width) ? in_array[i+][j-] : ;
value[] = is_in_array(j, i+, height, width) ? in_array[i+][j] : ;
value[] = is_in_array(j+, i+, height, width) ? in_array[i+][j+] : ; /* linear filtering */
out_array[i][j] = (value[] * average[][] + value[] * average[][] + value[] * average[][] +
value[] * average[][] + value[] * average[][] + value[] * average[][] +
value[] * average[][] + value[] * average[][] + value[] * average[][]) / sum; }
}
}
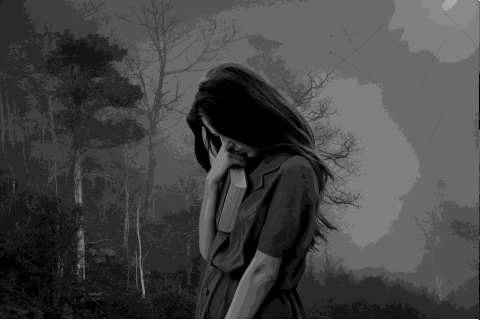
原图

模板
结果

可以看出线性滤波器会较大程度地影响原图,降低对比度,对与图片右上角的噪声没有明显的去除效果
统计排序(非线性)滤波器
中值滤波器
中值滤波器对处理脉冲噪声非常有效,这种噪声被称为椒盐噪声
实现方法:取该像素某邻域中值(本次测试取3*3)
代码实现
short mid_val(short* a, short num)
{
short temp; for (int i = ; i < num; i++)
{
temp = a[i];
int j = i;
for (; j > && a[j - ] > temp; j--)
a[j] = a[j - ];
a[j] = temp;
} return a[num/];
}
int is_in_array(short x, short y, short height, short width)
{
if (x >= && x < width && y >= && y < height)
return ;
else
return ;
} /*
* element
* v0 v1 v2
* v3 v4 v5
* v6 v7 v8
*
*/
void filtering(short** in_array, short** out_array, long height, long width)
{
short value[]; for (int i = ; i < height; i++){
for (int j = ; j < width; j++){
value[] = is_in_array(j-, i-, height, width) ? in_array[i-][j-] : ;
value[] = is_in_array(j, i-, height, width) ? in_array[i-][j] : ;
value[] = is_in_array(j+, i-, height, width) ? in_array[i-][j+] : ;
value[] = is_in_array(j-, i, height, width) ? in_array[i][j-] : ;
value[] = in_array[i][j];
value[] = is_in_array(j+, i, height, width) ? in_array[i][j+] : ;
value[] = is_in_array(j-, i+, height, width) ? in_array[i+][j-] : ;
value[] = is_in_array(j, i+, height, width) ? in_array[i+][j] : ;
value[] = is_in_array(j+, i+, height, width) ? in_array[i+][j+] : ; /* median filtering */
out_array[i][j] = mid_val(value, ); }
}
}
锐化空间滤波器
一阶微分

二阶微分

二阶微分在增强细节方面比一阶微分好很多,适合锐化图像
使用二阶微分进行图像锐化-拉普拉斯算子

代码实现
void filtering(short** in_array, short** out_array, long height, long width)
{
short value[]; for (int i = ; i < height; i++){
for (int j = ; j < width; j++){
value[] = is_in_array(j-, i-, height, width) ? in_array[i-][j-] : ;
value[] = is_in_array(j, i-, height, width) ? in_array[i-][j] : ;
value[] = is_in_array(j+, i-, height, width) ? in_array[i-][j+] : ;
value[] = is_in_array(j-, i, height, width) ? in_array[i][j-] : ;
value[] = in_array[i][j];
value[] = is_in_array(j+, i, height, width) ? in_array[i][j+] : ;
value[] = is_in_array(j-, i+, height, width) ? in_array[i+][j-] : ;
value[] = is_in_array(j, i+, height, width) ? in_array[i+][j] : ;
value[] = is_in_array(j+, i+, height, width) ? in_array[i+][j+] : ; /* sharpening filtering */
out_array[i][j] = value[] * sharpen[][] + value[] * sharpen[][] + value[] * sharpen[][] +
value[] * sharpen[][] + value[] * sharpen[][] + value[] * sharpen[][] +
value[] * sharpen[][] + value[] * sharpen[][] + value[] * sharpen[][];
out_array[i][j] += in_array[i][j];
if (out_array[i][j] < )
out_array[i][j] = ;
else if (out_array[i][j] > 0xff)
out_array[i][j] = 0xff; }
}
}
原图

锐化

使用一阶微分对(非线性)图像锐化-梯度
实现边缘增强

算法实现
int is_in_array(short x, short y, short height, short width)
{
if (x >= && x < width && y >= && y < height)
return ;
else
return ;
} /*
* element
* v0 v1 v2
* v3 v4 v5
* v6 v7 v8
*
*/
void filtering(short** in_array, short** out_array, long height, long width)
{
short value[]; for (int i = ; i < height; i++){
for (int j = ; j < width; j++){
value[] = is_in_array(j-, i-, height, width) ? in_array[i-][j-] : ;
value[] = is_in_array(j, i-, height, width) ? in_array[i-][j] : ;
value[] = is_in_array(j+, i-, height, width) ? in_array[i-][j+] : ;
value[] = is_in_array(j-, i, height, width) ? in_array[i][j-] : ;
value[] = in_array[i][j];
value[] = is_in_array(j+, i, height, width) ? in_array[i][j+] : ;
value[] = is_in_array(j-, i+, height, width) ? in_array[i+][j-] : ;
value[] = is_in_array(j, i+, height, width) ? in_array[i+][j] : ;
value[] = is_in_array(j+, i+, height, width) ? in_array[i+][j+] : ; /* sharpening using grad */
out_array[i][j] = (short)abs(value[] * soble1[][] + value[] * soble1[][] + value[] * soble1[][] +
value[] * soble1[][] + value[] * soble1[][] + value[] * soble1[][] +
value[] * soble1[][] + value[] * soble1[][] + value[] * soble1[][]) +
(short)abs(value[] * soble2[][] + value[] * soble2[][] + value[] * soble2[][] +
value[] * soble2[][] + value[] * soble2[][] + value[] * soble2[][] +
value[] * soble2[][] + value[] * soble2[][] + value[] * soble2[][]);
}
}
}
原图

边缘图
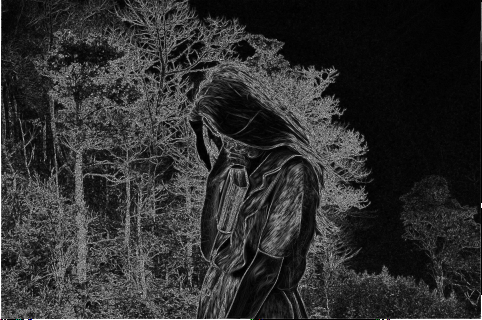
边缘增强
如果卷积和大于用户选择的的阈值,值为该和,否则,值为原图灰度值,选阈值为200
仅需在上述代码中添加
/* edge enhancement */
if (out_array[i][j] < )
out_array[i][j] = ;
else if (out_array[i][j] > 0xff)
out_array[i][j] = 0xff;
else if (out_array[i][j] > )
;
else
out_array[i][j] = in_array[i][j];
边缘增强图

c语言数字图像处理(五):空间滤波的更多相关文章
- c语言数字图像处理(三):仿射变换
仿射变换及坐标变换公式 几何变换改进图像中像素间的空间关系.这些变换通常称为橡皮模变换,因为它们可看成是在一块橡皮模上印刷一幅图像,然后根据预定的一组规则拉伸该薄膜.在数字图像处理中,几何变换由两个基 ...
- c语言数字图像处理(九):边缘检测
背景知识 边缘像素是图像中灰度突变的像素,而边缘是连接边缘像素的集合.边缘检测是设计用来检测边缘像素的局部图像处理方法. 孤立点检测 使用<https://www.cnblogs.com/Gol ...
- c语言数字图像处理(二):图片放大与缩小-双线性内插法
图像内插 假设一幅大小为500 * 500的图像扩大1.5倍到750 * 750,创建一个750 * 750 的网格,使其与原图像间隔相同,然后缩小至原图大小,在原图中寻找最接近的像素(或周围的像素) ...
- c语言数字图像处理(一):bmp图片格式及灰度图片转换
本篇文章首先介绍了bmp图片格式,主要参考wiki上的内容,包括bmp文件的存储方式,对于一些常见的bmp文件格式都给了例子,并且对8位 16位RGB555 16位RGB565格式的bmp文件进行了简 ...
- c语言数字图像处理(十):阈值处理
定义 全局阈值处理 假设某一副灰度图有如下的直方图,该图像由暗色背景下的较亮物体组成,从背景中提取这一物体时,将阈值T作为分割点,分割后的图像g(x, y)由下述公式给出,称为全局阈值处理 多阈值处理 ...
- c语言数字图像处理(八):噪声模型及均值滤波器
图像退化/复原过程模型 高斯噪声 PDF(概率密度函数) 生成高斯随机数序列 算法可参考<http://www.doc.ic.ac.uk/~wl/papers/07/csur07dt.pdf&g ...
- c语言数字图像处理(七):频率域滤波
代码运行了两个小时才出的结果,懒得测试了,这一部分先鸽了,等对DFT算法进行优化后再更
- c语言数字图像处理(六):二维离散傅里叶变换
基础知识 复数表示 C = R + jI 极坐标:C = |C|(cosθ + jsinθ) 欧拉公式:C = |C|ejθ 有关更多的时域与复频域的知识可以学习复变函数与积分变换,本篇文章只给出DF ...
- c语言数字图像处理(四):灰度变换
灰度变换 灰度变换函数 s = T(r) 其中r为输入图像在(x, y)点处的灰度值,s为输出图像在(x, y)点处的灰度值 灰度变换的作用 上图所示的两幅T(s)函数的图像曲线,第一幅图可以增强 ...
随机推荐
- 全局唯一Id:雪花算法
雪花算法-snowflake 分布式系统中,有一些需要使用全局唯一ID的场景,这种时候为了防止ID冲突可以使用36位的UUID,但是UUID有一些缺点,首先他相对比较长,另外UUID一般是无序的. 有 ...
- ZooKeeper学习之路 (九)利用ZooKeeper搭建Hadoop的HA集群
Hadoop HA 原理概述 为什么会有 hadoop HA 机制呢? HA:High Available,高可用 在Hadoop 2.0之前,在HDFS 集群中NameNode 存在单点故障 (SP ...
- selenium 无界面跑UI脚本
from selenium.webdriver.chrome.options import Options from selenium import webdriver import time chr ...
- 为Python加入默认模块搜索路径
为Python加入默认模块搜索路径 方法一:函数加入 1) import sys 2) 查看sys.path 3) 加入sys.path.append("c:\\") 方法二:改动 ...
- cocoapods导入三方库头文件找不到问题
问题描述:使用cocoapods时,import 找不到头文件. 问题原因: 1.缓存导致 2.没设置头文件的目录. 1.解决办法: command + k 清理工程 ,找到DerivedData文件 ...
- 使用zabbix发送邮件的简易设置流程(存档用)
1.安装邮件软件 (一般默认安装sendmail,这样apache也不用重新设置.) $sudo yum install sendmail 2.在zabbix上设置发送邮件用的本地邮箱 选择管理-&g ...
- ALV-TREE -转
****要注意创建相应程序的屏幕0100**** 在一些情况下,输出的ALV可能用树形结构更容易展现数据之间的相互关联,为了输出ALV-TREE主要用到的是容器类(如CL_GUI_CONTAINER或 ...
- springboot-web进阶(四)——单元测试
一.概述 基础知识,参考:https://www.cnblogs.com/ysw-go/p/5447056.html 二.springboot的单元测试 1.入门测试类 最重要的不要忘记类上面的依赖, ...
- FSCapture注册码
企业版序列号: name:bluman serial/序列号/注册码:VPISCJULXUFGDDXYAUYF
- 2015539平措卓玛课堂测试(ch06)
课堂测试(ch06) 1.下面代码中,对数组x填充后,采用直接映射高速缓存,所有对x和y引用的命中率为(D) A .1 B .1/4 C .1/2 D .3/4 解析:缓存命中:当程序需要第(k+1) ...