c语言数字图像处理(八):噪声模型及均值滤波器
图像退化/复原过程模型

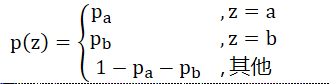
高斯噪声
PDF(概率密度函数)

生成高斯随机数序列
算法可参考<http://www.doc.ic.ac.uk/~wl/papers/07/csur07dt.pdf>
代码实现
double gaussrand()
{
static double V1, V2, S;
static int phase = ;
double X; if(phase == ) {
do {
double U1 = (double)rand() / RAND_MAX;
double U2 = (double)rand() / RAND_MAX; V1 = * U1 - ;
V2 = * U2 - ;
S = V1 * V1 + V2 * V2;
} while(S >= || S == ); X = V1 * sqrt(- * log(S) / S);
} else
X = V2 * sqrt(- * log(S) / S); phase = - phase; return X * ;
}
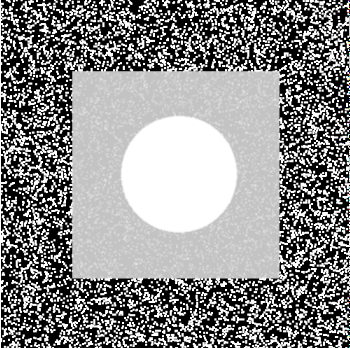
生成高斯噪声图及直方图
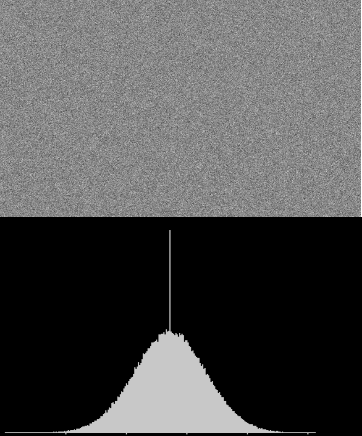
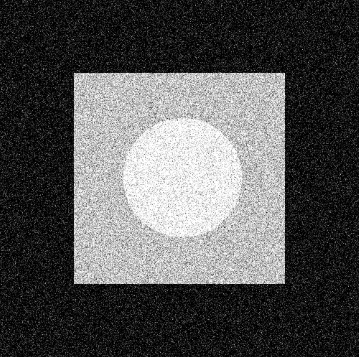
下面给一幅图添加高斯噪声
代码实现
void add_gaussian_noise(short** in_array, short** out_array, long height, long width)
{
srand(time(NULL));
for (int i = ; i < height; i++){
for (int j = ; j < width; j++){
out_array[i][j] = in_array[i][j] + (short)gaussrand();
if (out_array[i][j] < 0x00)
out_array[i][j] = 0x00;
else if (out_array[i][j] > 0xff)
out_array[i][j] = 0xff;
}
}
}
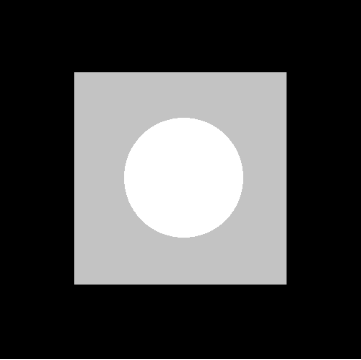
原图
添加高斯噪声
椒盐噪声
添加椒盐噪声(胡椒噪声和盐粒噪声概率分别为5%)
void add_salt_pepper_noise(short** in_array, short** out_array, long height, long width)
{
srand(time(NULL));
int noise_p; for (int i = ; i < height; i++){
for (int j = ; j < width; j++){
noise_p = rand() % ;
if (noise_p == ){
int temp = rand() % ;
if (temp)
out_array[i][j] = 0x00;
else
out_array[i][j] = 0xff;
}
else
out_array[i][j] = in_array[i][j];
}
}
}

均值滤波器
算术均值滤波器
代码实现
int is_in_array(short x, short y, short height, short width)
{
if (x >= && x < width && y >= && y < height)
return ;
else
return ;
} /*
* element
* v0 v1 v2
* v3 v4 v5
* v6 v7 v8
*
*/
void filtering(short** in_array, short** out_array, long height, long width)
{
short value[]; for (int i = ; i < height; i++){
for (int j = ; j < width; j++){
value[] = is_in_array(j-, i-, height, width) ? in_array[i-][j-] : ;
value[] = is_in_array(j, i-, height, width) ? in_array[i-][j] : ;
value[] = is_in_array(j+, i-, height, width) ? in_array[i-][j+] : ;
value[] = is_in_array(j-, i, height, width) ? in_array[i][j-] : ;
value[] = in_array[i][j];
value[] = is_in_array(j+, i, height, width) ? in_array[i][j+] : ;
value[] = is_in_array(j-, i+, height, width) ? in_array[i+][j-] : ;
value[] = is_in_array(j, i+, height, width) ? in_array[i+][j] : ;
value[] = is_in_array(j+, i+, height, width) ? in_array[i+][j+] : ; /* Arithmetic Mean Filter */
for (int k = ; k < ARRAY_SIZE*ARRAY_SIZE; k++)
out_array[i][j] += value[k];
out_array[i][j] /= ARRAY_SIZE*ARRAY_SIZE; }
}
}
处理高斯噪声

处理椒盐噪声

结论:算术平均滤波对于高斯噪声和椒盐噪声都有一定的效果,但是同时会平滑图像
几何均值滤波器

实现
void filtering(short** in_array, short** out_array, long height, long width)
{
short value[]; for (int i = ; i < height; i++){
for (int j = ; j < width; j++){
value[] = is_in_array(j-, i-, height, width) ? in_array[i-][j-] : ;
value[] = is_in_array(j, i-, height, width) ? in_array[i-][j] : ;
value[] = is_in_array(j+, i-, height, width) ? in_array[i-][j+] : ;
value[] = is_in_array(j-, i, height, width) ? in_array[i][j-] : ;
value[] = in_array[i][j];
value[] = is_in_array(j+, i, height, width) ? in_array[i][j+] : ;
value[] = is_in_array(j-, i+, height, width) ? in_array[i+][j-] : ;
value[] = is_in_array(j, i+, height, width) ? in_array[i+][j] : ;
value[] = is_in_array(j+, i+, height, width) ? in_array[i+][j+] : ; /* Geometric Mean Filter */
double product = 1.0;
for (int k = ; k < ARRAY_SIZE*ARRAY_SIZE; k++)
product *= value[k];
product = pow(product, 1.0 / 9.0);
out_array[i][j] = (short)product; if (out_array[i][j] < 0x00)
out_array[i][j] = 0x00;
else if (out_array[i][j] > 0xff)
out_array[i][j] = 0xff;
}
}
}
几何均值滤波器与算术均值滤波器相比,丢失的图像细节更少
谐波均值滤波器
实现
void filtering(short** in_array, short** out_array, long height, long width)
{
short value[]; for (int i = ; i < height; i++){
for (int j = ; j < width; j++){
value[] = is_in_array(j-, i-, height, width) ? in_array[i-][j-] : ;
value[] = is_in_array(j, i-, height, width) ? in_array[i-][j] : ;
value[] = is_in_array(j+, i-, height, width) ? in_array[i-][j+] : ;
value[] = is_in_array(j-, i, height, width) ? in_array[i][j-] : ;
value[] = in_array[i][j];
value[] = is_in_array(j+, i, height, width) ? in_array[i][j+] : ;
value[] = is_in_array(j-, i+, height, width) ? in_array[i+][j-] : ;
value[] = is_in_array(j, i+, height, width) ? in_array[i+][j] : ;
value[] = is_in_array(j+, i+, height, width) ? in_array[i+][j+] : ; /* Harmonic Mean Filter */
double sum = ;
for (int k = ; k < ARRAY_SIZE*ARRAY_SIZE; k++)
sum += 1.0 / value[k];
out_array[i][j] = (short)(9.0 / sum); if (out_array[i][j] < 0x00)
out_array[i][j] = 0x00;
else if (out_array[i][j] > 0xff)
out_array[i][j] = 0xff;
}
}
}
处理高斯噪声

处理椒盐噪声

对盐粒噪声效果较好,不适用于胡椒噪声,善于处理高斯噪声
逆谐波均值滤波器
Q为滤波器的阶数,Q为正时,消除胡椒噪声,Q为负时消除盐粒噪声
Q=0为算术均值滤波器,Q=-1谐波均值滤波器
实现
void filtering(short** in_array, short** out_array, long height, long width)
{
short value[]; for (int i = ; i < height; i++){
for (int j = ; j < width; j++){
value[] = is_in_array(j-, i-, height, width) ? in_array[i-][j-] : ;
value[] = is_in_array(j, i-, height, width) ? in_array[i-][j] : ;
value[] = is_in_array(j+, i-, height, width) ? in_array[i-][j+] : ;
value[] = is_in_array(j-, i, height, width) ? in_array[i][j-] : ;
value[] = in_array[i][j];
value[] = is_in_array(j+, i, height, width) ? in_array[i][j+] : ;
value[] = is_in_array(j-, i+, height, width) ? in_array[i+][j-] : ;
value[] = is_in_array(j, i+, height, width) ? in_array[i+][j] : ;
value[] = is_in_array(j+, i+, height, width) ? in_array[i+][j+] : ; /* Contra-Harmonic Mean Filter */
int Q = ;
double num = 0.0, den = 0.0;
for (int k = ; k < ARRAY_SIZE*ARRAY_SIZE; k++){
num += pow(value[k], Q+);
den += pow(value[k], Q);
}
out_array[i][j] = (short)(num / den); if (out_array[i][j] < 0x00)
out_array[i][j] = 0x00;
else if (out_array[i][j] > 0xff)
out_array[i][j] = 0xff;
}
}
}
Q = 2 消除胡椒噪声
Q = -2消除盐粒噪声

Q = -2消除盐粒噪声后的图像使用Q = 2消除胡椒噪声

再来一次

再来

此时椒盐噪声已经基本消除
c语言数字图像处理(八):噪声模型及均值滤波器的更多相关文章
- [数字图像处理]常见噪声的分类与Matlab实现
1.研究噪声特性的必要性 本文的内容主要介绍了常见噪声的分类与其特性. 将噪声建模,然后用模型去实现各式各样的噪声. 实际生活中的各种照片的老化,都能够归结为下面老化模型. 这个模型非常easy,也能 ...
- c语言数字图像处理(三):仿射变换
仿射变换及坐标变换公式 几何变换改进图像中像素间的空间关系.这些变换通常称为橡皮模变换,因为它们可看成是在一块橡皮模上印刷一幅图像,然后根据预定的一组规则拉伸该薄膜.在数字图像处理中,几何变换由两个基 ...
- Win8 Metro(C#)数字图像处理--2.52图像K均值聚类
原文:Win8 Metro(C#)数字图像处理--2.52图像K均值聚类 [函数名称] 图像KMeans聚类 KMeansCluster(WriteableBitmap src,i ...
- c语言数字图像处理(九):边缘检测
背景知识 边缘像素是图像中灰度突变的像素,而边缘是连接边缘像素的集合.边缘检测是设计用来检测边缘像素的局部图像处理方法. 孤立点检测 使用<https://www.cnblogs.com/Gol ...
- c语言数字图像处理(五):空间滤波
空间滤波原理 使用大小为m*n的滤波器对大小为M*N的图像进行线性空间滤波,将滤波器模板乘以图像中对应灰度值,相加得模板中心灰度值 a = (m-1)/2, b = (n-1)/2 若f(x+s, y ...
- c语言数字图像处理(二):图片放大与缩小-双线性内插法
图像内插 假设一幅大小为500 * 500的图像扩大1.5倍到750 * 750,创建一个750 * 750 的网格,使其与原图像间隔相同,然后缩小至原图大小,在原图中寻找最接近的像素(或周围的像素) ...
- c语言数字图像处理(一):bmp图片格式及灰度图片转换
本篇文章首先介绍了bmp图片格式,主要参考wiki上的内容,包括bmp文件的存储方式,对于一些常见的bmp文件格式都给了例子,并且对8位 16位RGB555 16位RGB565格式的bmp文件进行了简 ...
- c语言数字图像处理(十):阈值处理
定义 全局阈值处理 假设某一副灰度图有如下的直方图,该图像由暗色背景下的较亮物体组成,从背景中提取这一物体时,将阈值T作为分割点,分割后的图像g(x, y)由下述公式给出,称为全局阈值处理 多阈值处理 ...
- c语言数字图像处理(七):频率域滤波
代码运行了两个小时才出的结果,懒得测试了,这一部分先鸽了,等对DFT算法进行优化后再更
随机推荐
- Oracle SQL Developer官方工具 初探
查询表数据(打开工作表:Alt+F10) 运行SQL语句:(格式化:Ctrl+F7) 自动完成语句的设置 自动弹出的速度加快,并且将命中率提高,进行如下设置: 由于我的输入法占用了CTRL+,的快捷建 ...
- 利用skipList(跳表)来实现排序(待补充)
用于排名的数据结构 一般排序为利用堆排序(二叉树)和利用skipList(跳表)的方式 redis中SortedSet利用skipList(跳表)来实现排序,复杂度为O(logn),利用空间换时间,类 ...
- Hadoop HA 高可用集群的搭建
hadoop部署服务器 系统 主机名 IP centos6.9 hadoop01 192.168.72.21 centos6.9 hadoop02 192.168.72.22 centos6.9 ha ...
- [luogu3941] 入阵曲
题面 话说题目前面的那首诗还挺有意境的啊哈哈. 可能今天要把中文的标点都换成英文的了, 先熟悉一下吧... 好了, 进入正题, 求一个矩阵内有多少个子矩阵满足这个子矩阵的和模k为零.看到矩 ...
- DOM几个重要的函数
最近在读js编程艺术,发现几个不错的函数,总结如下: 1.页面初始化加载函数onload 操作DOM的函数应该在页面元素初始化结束之后再立即执行,否则页面元素还没有初始化完成,DOM操作就会搁浅了:网 ...
- 在线扫描PDF JPG 图片上面文字
在线扫描PDF JPG 图片上面文字
- Hadoop源码分析(mapreduce.lib.partition/reduce/output)
Map的结果,会通过partition分发到Reducer上.Reducer做完Reduce操作后,通过OutputFormat,进行输出.以下我们就来分析參与这个过程的类. Mapper的结果, ...
- Apache Shiro(一)-登录认证和权限管理初识
What is Apache Shiro? Apache Shiro是一个功能强大.灵活的,开源的安全框架.它可以干净利落地处理身份验证.授权.企业会话管理和加密. Apache Shiro的首要目标 ...
- JS基础-组成
类型 前缀 类型 实例 数组 a Array aItems 布尔值 b Boolean bIsComplete 浮点数 f Float fPrice 函数 fn Function fnHandler ...
- UOJ#206. 【APIO2016】Gap(交互,乱搞)
描述 提交 自定义测试 有 NN 个严格递增的非负整数 a1,a2,…,aNa1,a2,…,aN(0≤a1<a2<⋯<aN≤10180≤a1<a2<⋯<aN≤101 ...