c语言数字图像处理(十):阈值处理
定义
全局阈值处理
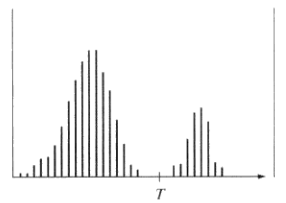
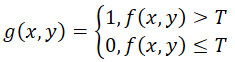
假设某一副灰度图有如下的直方图,该图像由暗色背景下的较亮物体组成,从背景中提取这一物体时,将阈值T作为分割点,分割后的图像g(x, y)由下述公式给出,称为全局阈值处理
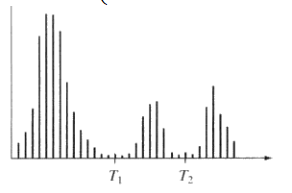
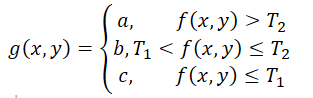
多阈值处理
本文仅完成全局阈值处理的算法实现
基本全局阈值处理方法
1. 为全局阈值T选择一个初始的估计值
2. 用T分割图像,产生两组像素:G1由大于T的像素组成,G2由小于T的像素组成
3. 对G1和G2的像素分别计算平均灰度值m1和m2
4. 计算新的阈值T = 1/2 * (m1 + m2)
5. 重复步骤2-4,直到连续迭代中的T值差小于一个预定义的参数ΔT
算法实现
void threshold(short** in_array, short** out_array, long height, long width, int delt_t)
{
double T = 0xff / 2.0;
double m1 = 0.0, m2 = 0.0;
int m1_num = , m2_num = ; while(dabs(T, 0.5*(m1 + m2)) > delt_t){
T = 0.5 * (m1 + m2);
m1 = 0.0;
m2 = 0.0;
m1_num = ;
m2_num = ; for (int i = ; i < height; i++){
for (int j = ; j < width; j++){
if (in_array[i][j] <= T){
m1 += in_array[i][j];
m1_num++;
}
else{
m2 += in_array[i][j];
m2_num++;
}
}
}
if (m1_num != )
m1 /= m1_num;
if (m2_num != )
m2 /= m2_num;
printf("%lf\n", T);
}
for (int i = ; i < height; i++){
for (int j = ; j < width; j++){
if (in_array[i][j] <= T)
out_array[i][j] = 0xff;
else
out_array[i][j] = 0x00;
}
}
}
测试结果

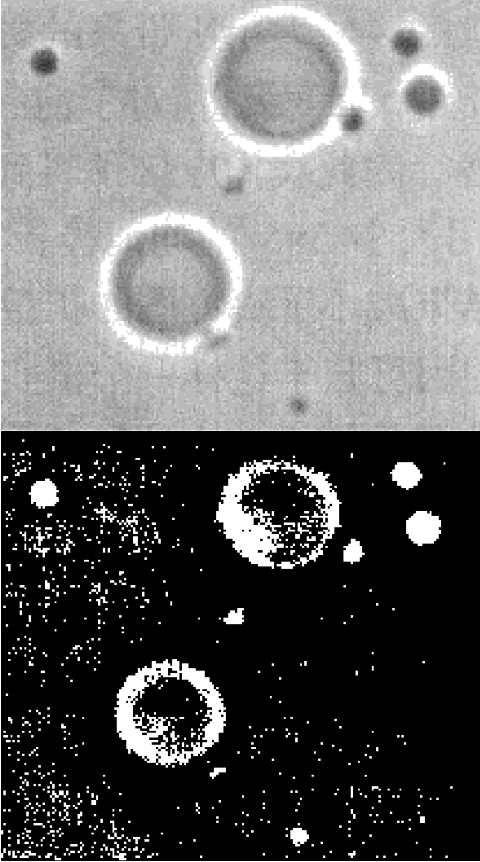
从实验结果看出,第二组阈值处理的效果并不好,因此考虑更优的算法实现
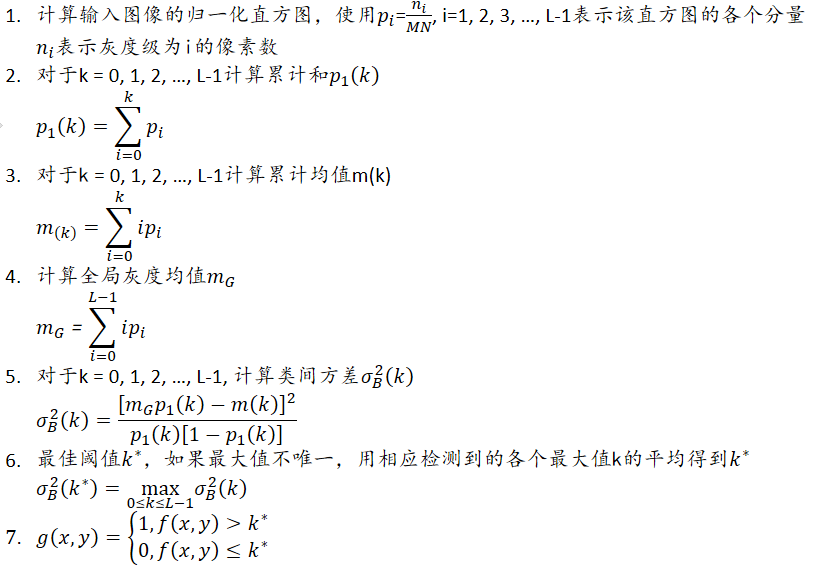
Otsu方法进行最佳全局阈值处理
阈值处理可视为一种统计决策理论问题,其目的是在把像素分配给两个或多个组的过程中引入的平均误差最小。这一问题有个闭合形式的解,称为贝叶斯决策规则。
Otsu方法在类间方差最大的情况下是最佳的
算法执行流程
代码实现
double dabs(double a, double b)
{
if (a < b)
return b-a;
else
return a-b;
} void calculate_histogram(long height, long width, short **image, unsigned long histogram[])
{
short k;
for(int i=; i < height; i++){
for(int j=; j < width; j++){
k = image[i][j];
histogram[k] = histogram[k] + ;
}
}
} void calculate_pi(long height, long width, unsigned long histogram[], double pi[])
{
for (int i = ; i < GRAY_LEVELS; ++i){
pi[i] = (double)histogram[i] / (double)(height * width);
}
} double p1(int k, double pi[])
{
double sum = 0.0; for (int i = ; i <= k; i++){
sum += pi[i];
} return sum;
} double m(int k, double pi[])
{
double sum = 0.0; for (int i = ; i <= k; i++){
sum += i * pi[i];
} return sum;
} double calculate_sigma(int k, double mg, double pi[])
{
double p1k = p1(k, pi);
double mk = m(k, pi); if (p1k < 1e- || ( - p1k) < 1e-)
return 0.0;
else
return pow(mg * p1k - mk, ) / (p1k * ( - p1k));
} void otsu(short** in_array, short** out_array, long height, long width)
{
unsigned long histogram[GRAY_LEVELS] = {};
double pi[GRAY_LEVELS] = {};
double sigma[GRAY_LEVELS] = {};
double mg;
short max_count = ;
short k = ;
double max_value = 0.0;
double k_star; calculate_histogram(height, width, in_array, histogram);
calculate_pi(height, width, histogram, pi);
mg = m(GRAY_LEVELS-, pi); for (int i = ; i < GRAY_LEVELS; i++)
sigma[i] = calculate_sigma(i, mg, pi); max_value = sigma[];
max_count = ;
k = ;
for (int i = ; i < GRAY_LEVELS; i++){
if (dabs(sigma[i], max_value) < 1e-){
k += i;
max_count++;
}
else if (sigma[i] > max_value){
max_value = sigma[i];
max_count = ;
k = i;
}
}
k_star = k / max_count; printf("%lf\n", k_star);
for (int i = ; i < height; i++){
for (int j = ; j < width; j++){
if (in_array[i][j] <= k_star)
out_array[i][j] = 0x00;
else
out_array[i][j] = 0xff;
}
}
}
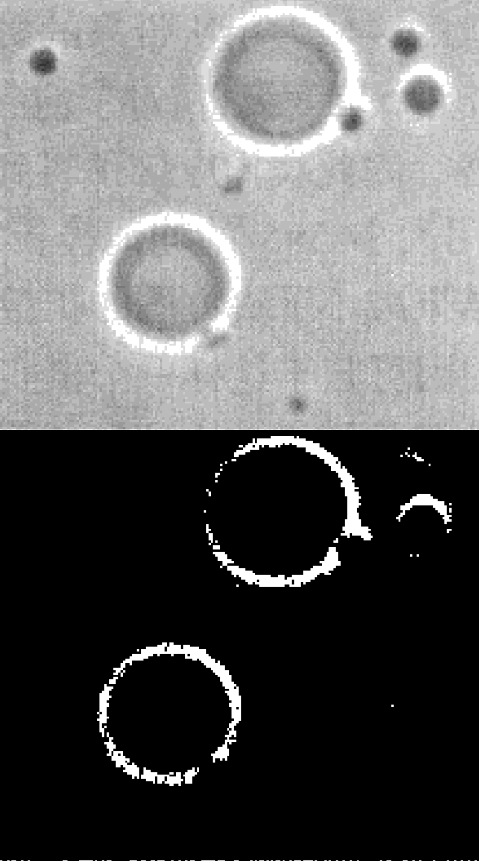
结果
c语言数字图像处理(十):阈值处理的更多相关文章
- c语言数字图像处理(三):仿射变换
仿射变换及坐标变换公式 几何变换改进图像中像素间的空间关系.这些变换通常称为橡皮模变换,因为它们可看成是在一块橡皮模上印刷一幅图像,然后根据预定的一组规则拉伸该薄膜.在数字图像处理中,几何变换由两个基 ...
- c语言数字图像处理(九):边缘检测
背景知识 边缘像素是图像中灰度突变的像素,而边缘是连接边缘像素的集合.边缘检测是设计用来检测边缘像素的局部图像处理方法. 孤立点检测 使用<https://www.cnblogs.com/Gol ...
- c语言数字图像处理(五):空间滤波
空间滤波原理 使用大小为m*n的滤波器对大小为M*N的图像进行线性空间滤波,将滤波器模板乘以图像中对应灰度值,相加得模板中心灰度值 a = (m-1)/2, b = (n-1)/2 若f(x+s, y ...
- c语言数字图像处理(二):图片放大与缩小-双线性内插法
图像内插 假设一幅大小为500 * 500的图像扩大1.5倍到750 * 750,创建一个750 * 750 的网格,使其与原图像间隔相同,然后缩小至原图大小,在原图中寻找最接近的像素(或周围的像素) ...
- c语言数字图像处理(一):bmp图片格式及灰度图片转换
本篇文章首先介绍了bmp图片格式,主要参考wiki上的内容,包括bmp文件的存储方式,对于一些常见的bmp文件格式都给了例子,并且对8位 16位RGB555 16位RGB565格式的bmp文件进行了简 ...
- c语言数字图像处理(八):噪声模型及均值滤波器
图像退化/复原过程模型 高斯噪声 PDF(概率密度函数) 生成高斯随机数序列 算法可参考<http://www.doc.ic.ac.uk/~wl/papers/07/csur07dt.pdf&g ...
- c语言数字图像处理(七):频率域滤波
代码运行了两个小时才出的结果,懒得测试了,这一部分先鸽了,等对DFT算法进行优化后再更
- c语言数字图像处理(六):二维离散傅里叶变换
基础知识 复数表示 C = R + jI 极坐标:C = |C|(cosθ + jsinθ) 欧拉公式:C = |C|ejθ 有关更多的时域与复频域的知识可以学习复变函数与积分变换,本篇文章只给出DF ...
- c语言数字图像处理(四):灰度变换
灰度变换 灰度变换函数 s = T(r) 其中r为输入图像在(x, y)点处的灰度值,s为输出图像在(x, y)点处的灰度值 灰度变换的作用 上图所示的两幅T(s)函数的图像曲线,第一幅图可以增强 ...
随机推荐
- #003 React 组件 继承 自定义的组件
主题:React组件 继承 自定义的 组件 一.需求说明 情况说明: 有A,B,C,D 四个组件,里面都有一些公用的逻辑,比如 设置数据,获取数据,有某些公用的的属性,不想在 每一个 组件里面写这些属 ...
- Spfa(最短路求解)
spfa(最短路求解) 模板: #include<iostream> #include<cstdio> #include<queue> #include<cs ...
- 【ansible】Windows开启远程控制错误解决方案:无法检查防火墙状态
这个在老版本的Windows系统才有这种bug.例如Windows 2008 R2和Windows 7,如果你的系统的阿里云的Windows server 2008 R2,无需装这个,好像阿里云的系统 ...
- HTML头标签使用-又一次定向,refresh
<html> <head> <meta http-equiv="Content-Type" content="text/html; char ...
- 【洛谷】【线段树】P1886 滑动窗口
[题目描述:] 现在有一堆数字共N个数字(N<=10^6),以及一个大小为k的窗口.现在这个从左边开始向右滑动,每次滑动一个单位,求出每次滑动后窗口中的最大值和最小值. [输入格式:] 输入一共 ...
- Odoo图片如何显示
转载请注明原文地址:https://www.cnblogs.com/cnodoo/p/9281423.html odoo没有专门的图片标签,但是可以通过widget来控制field标签来显示图片内容. ...
- Linux centos修改防火墙为iptables
防火墙配置 CentOS 7默认使用的是firewall作为防火墙,这里改为iptables防火墙. firewall操作: # service firewalld status; #查看防火墙状态 ...
- snip
首先明确物体太小太大都不好检测(都从roi的角度来分析): 1.小物体: a.本身像素点少,如果从anchor的点在gt像素内来说,能提取出来的正样本少 b.小物体会出现iou过低.具体来说 ...
- error: OpenCV Error: Assertion failed (0 <= roi.x && 0 <= roi.width && roi.x + roi.width <= m.cols && 0 <= roi.y && 0 <= roi.height && roi.y + roi.height <= m.rows) in cv::Mat::Mat
问题原因: You are probably working outside of the image dimensions. Does any of the values you pass to t ...
- Appium移动自动化测试(一)--Mac安装Appium
一.Appium安装 1. 直接安装:Appium官网下载:https://bitbucket.org/appium/appium.app/downloads/ 这里mac系统升级到 Sierra后, ...