OpenCV模板匹配算法详解
1 理论介绍
模板匹配是在一幅图像中寻找一个特定目标的方法之一,这种方法的原理非常简单,遍历图像中的每一个可能的位置,比较各处与模板是否“相似”,当相似度足够高时,就认为找到了我们的目标。OpenCV提供了6种模板匹配算法:
- 平方差匹配法CV_TM_SQDIFF
- 归一化平方差匹配法CV_TM_SQDIFF_NORMED
- 相关匹配法CV_TM_CCORR
- 归一化相关匹配法CV_TM_CCORR_NORMED
- 相关系数匹配法CV_TM_CCOEFF
- 归一化相关系数匹配法CV_TM_CCOEFF_NORMED
用T表示模板图像,I表示待匹配图像,切模板图像的宽为w高为h,用R表示匹配结果,匹配过程如下图所示:

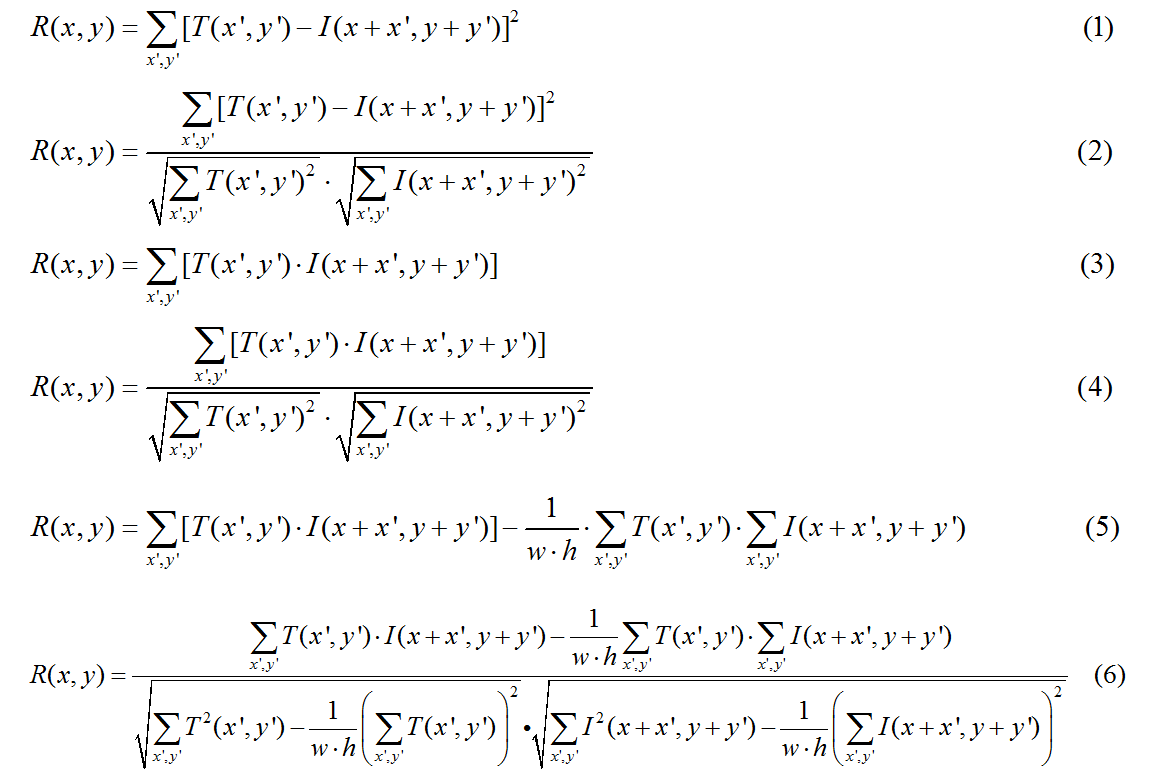
上述6中匹配方法可用以下公式进行描述:
2 示例代码
下面给出方法6的python代码
import numpy as np
import cv2 def EM(pModel, width, height):
sum = np.double(0.0)
for i in range(0,height):
for j in range(0,width):
sum += pModel[i][j]
return sum def EM2(pModel, width, height):
sum = np.double(0.0)
for i in range(0,height):
for j in range(0,width):
sum += pModel[i][j]*1.0*pModel[i][j]
return sum def EI(pToSearch, l, h, u, v, pModel, width, height):
sum = np.double(0.0)
roi = pToSearch[v:v+height, u:u+width]
for i in range(0,height):
for j in range(0,width):
sum += roi[i][j]
return sum def EI2(pToSearch, l, h, u, v, pModel, width, height):
sum = np.double(0.0)
roi = pToSearch[v:v+height, u:u+width]
for i in range(0,height):
for j in range(0,width):
sum += roi[i][j]*1.0*roi[i][j]
return sum def EIM(pToSearch, l, h, u, v, pModel, width, height):
sum = np.double(0.0)
roi = pToSearch[v:v+height, u:u+width]
for i in range(0,height):
for j in range(0,width):
sum += pModel[i][j]*1.0*roi[i][j]
return sum def Match(pToSearch, l, h, pModel, width, height):
uMax = l-width
vMax = h-height
N = width*height
len = (uMax+1)*(vMax+1)
MatchRec = [0.0 for x in range(0, len)]
k = 0 M = EM(pModel,width,height)
M2 = EM2(pModel,width,height)
for p in range(0, uMax+1):
for q in range(0, vMax+1):
I = EI(pToSearch,l,h,p,q,pModel,width,height)
I2 = EI2(pToSearch,l,h,p,q,pModel,width,height)
IM = EIM(pToSearch,l,h,p,q,pModel,width,height) numerator=(N*IM-I*M)*(N*IM-I*M)
denominator=(N*I2-I*I)*(N*M2-M*M) ret = numerator/denominator
MatchRec[k]=ret
k+=1 val = 0
k = 0
x = y = 0
for p in range(0, uMax+1):
for q in range(0, vMax+1):
if MatchRec[k] > val:
val = MatchRec[k]
x = p
y = q
k+=1
print "val: %f"%val
return (x, y) def main():
img = cv2.imread('niu.jpg', cv2.IMREAD_GRAYSCALE)
temp = cv2.imread('temp.png', cv2.IMREAD_GRAYSCALE) print temp.shape
imgHt, imgWd = img.shape
tempHt, tempWd = temp.shape
#print EM(temp, tempWd, tempHt)
(x, y) = Match(img, imgWd, imgHt, temp, tempWd, tempHt)
cv2.rectangle(img, (x, y), (x+tempWd, y+tempHt), (0,0,0), 2)
cv2.imshow("temp", temp)
cv2.imshow("result", img)
cv2.waitKey(0)
cv2.destroyAllWindows() if __name__ == '__main__':
main()
归一化相关系数匹配法
代码58行中的N就是公式(6)中的w*h,由于python代码运行速度比较慢,代码的58、59行相当于对公式(6)的分子分母都进行了平方操作,并且分子分母都乘以了N方,以减小计算量,所以代码61行的ret相当于公式(6)中的R(x,y)的平方,
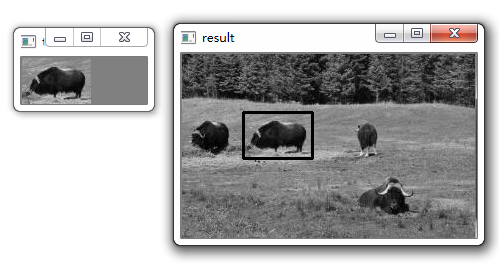
为了更快的进行算法验证,用上述代码进行验证时请尽量选用较小的匹配图像及模板图像,下图显示了我的匹配结果(待匹配图像295x184模板69x46用了十几分钟):
3 OpenCV源码
较新版本的OpenCV库中的模板匹配已经进行了较多的算法改进,直接看新版本中的算法需要了解很多相关理论知识,所以我们结合OpenCV0.9.5的源码进行讲解,该版本的源码基本上是C风格代码更容易进行理解(如果要对
OpenCV源码进行研究,建议用该版本进行入门),仍以归一化相关系数匹配法为例进行分析。
/*
* pImage: 待匹配图像
* image: 待匹配图像宽(width*depth并已4字节对齐)
* roiSize: 待匹配图像尺寸
* pTemplate: 模板图像
* templStep: 模板图像宽
* templSize: 模板图像尺寸
* pResult: 匹配结果
* resultStep: 匹配结果宽
* pBuffer: 中间结果数据缓存
*/
IPCVAPI_IMPL( CvStatus, icvMatchTemplate_CoeffNormed_32f_C1R,
(const float *pImage, int imageStep, CvSize roiSize,
const float *pTemplate, int templStep, CvSize templSize,
float *pResult, int resultStep, void *pBuffer) )
{
float *imgBuf = ; // 待匹配图像相关数据
float *templBuf = ; // 模板图像数据
double *sumBuf = ; // 待匹配图像遍历块单行和
double *sqsumBuf = ; // 待匹配图像遍历块单行平方和
double *resNum = ; // 模板图像和待匹配图像遍历块内积
double *resDenom = ; // 待匹配图像遍历块累加和及待匹配图像遍历块平方累加和
double templCoeff = ; // 模板图像均分差倒数
double templSum = ; // 模板图像累加和 int winLen = templSize.width * templSize.height;
double winCoeff = . / (winLen + DBL_EPSILON); // + DBL_EPSILON 加一个小整数防止分母为零 CvSize resultSize = cvSize( roiSize.width - templSize.width + ,
roiSize.height - templSize.height + );
int x, y; // 计算并为imgBuf、templBuf、sumBuf、sqsumBuf、resNum、resDenom分配存储空间
CvStatus result = icvMatchTemplateEntry( pImage, imageStep, roiSize,
pTemplate, templStep, templSize,
pResult, resultStep, pBuffer,
cv32f, , ,
(void **) &imgBuf, (void **) &templBuf,
(void **) &sumBuf, (void **) &sqsumBuf,
(void **) &resNum, (void **) &resDenom ); if( result != CV_OK )
return result; imageStep /= sizeof_float;
templStep /= sizeof_float;
resultStep /= sizeof_float; /* calc common statistics for template and image */
{
const float *rowPtr = (const float *) imgBuf;
double templSqsum = icvCrossCorr_32f_C1( templBuf, templBuf, winLen ); // 模板图像平方累加和 templSum = icvSumPixels_32f_C1( templBuf, winLen ); // 模板图像累加和
templCoeff = (double) templSqsum - ((double) templSum) * templSum * winCoeff; // 模板图像均方差的平方
templCoeff = icvInvSqrt64d( fabs( templCoeff ) + FLT_EPSILON ); // 模板图像均方差倒数 for( y = ; y < roiSize.height; y++, rowPtr += templSize.width )
{
sumBuf[y] = icvSumPixels_32f_C1( rowPtr, templSize.width ); // 待匹配图像按模板图像宽度求每行之和(遍历位置第一列)
sqsumBuf[y] = icvCrossCorr_32f_C1( rowPtr, rowPtr, templSize.width ); // 待匹配图像按模板图像宽度求每行平方之和(遍历位置第一列)
}
} /* main loop - through x coordinate of the result */
for( x = ; x < resultSize.width; x++ )
{
double sum = ;
double sqsum = ;
float *imgPtr = imgBuf + x; // 待匹配图像起始位置 /* update sums and image band buffer */ // 如果不是第1列需重新更新sumBuf,更新后sumBuf为遍历位置第x列每行之和(行宽为模板图像宽)
if( x > )
{
const float *src = pImage + x + templSize.width - ;
float *dst = imgPtr - ;
float out_val = dst[]; dst += templSize.width; for( y = ; y < roiSize.height; y++, src += imageStep, dst += templSize.width )
{
float in_val = src[]; sumBuf[y] += in_val - out_val;
sqsumBuf[y] += (in_val - out_val) * (in_val + out_val);
out_val = dst[];
dst[] = (float) in_val;
}
} for( y = ; y < templSize.height; y++ ) // 求遍历位置第x列,第1行处遍历块累加和sum及平方累加和sqsum
{
sum += sumBuf[y];
sqsum += sqsumBuf[y];
} for( y = ; y < resultSize.height; y++, imgPtr += templSize.width )
{
double res = icvCrossCorr_32f_C1( imgPtr, templBuf, winLen ); // 求模板图像和待匹配图像y行x列处遍历块的内积 if( y > ) // 如果不是第1行需更新遍历块累加和sum及平方累加和sqsum
{
sum -= sumBuf[y - ];
sum += sumBuf[y + templSize.height - ];
sqsum -= sqsumBuf[y - ];
sqsum += sqsumBuf[y + templSize.height - ];
}
resNum[y] = res;
resDenom[y] = sum;
resDenom[y + resultSize.height] = sqsum;
} for( y = ; y < resultSize.height; y++ )
{
double sum = ((double) resDenom[y]);
double wsum = winCoeff * sum;
double res = ((double) resNum[y]) - wsum * templSum;
double nrm_s = ((double) resDenom[y + resultSize.height]) - wsum * sum; res *= templCoeff * icvInvSqrt64d( fabs( nrm_s ) + FLT_EPSILON );
pResult[x + y * resultStep] = (float) res;
}
} return CV_OK;
}
以上代码是归一化相关系数法核心函数icvMatchTemplate_CoeffNormed_32f_C1R的源码,我已经在源码中进行了详细的注释,读者需自己再进行理解,需要进一步说明的是:
代码118行res就是计算公式(6)的分子部分,代码56行templCoeff就是计算公式(6)分母的左半部分,代码121行icvInvSqrt64d函数就是在计算公式(6)分母的右半部分,该行res的最终结果正是公式(6)中的R(x,y)。
4 结束语
OpenCV0.9.5源码下载:http://download.csdn.net/detail/weiwei22844/9547820
参考文章:http://blog.sina.com.cn/s/blog_4ae371970101aejw.html
http://blog.csdn.net/liyuanbhu/article/details/49837661
OpenCV模板匹配算法详解的更多相关文章
- 【转】Eclipse Java注释模板设置详解
Eclipse Java注释模板设置详解 设置注释模板的入口: Window->Preference->Java->Code Style->Code Template 然后 ...
- 【转载】 Eclipse注释模板设置详解
Eclipse注释模板设置详解 网站推荐: 金丝燕网(主要内容是 Java 相关) 木秀林网(主要内容是消息队列)
- tp6源码解析-第二天,ThinkPHP6编译模板流程详解,ThinkPHP6模板源码详解
TP6源码解析,ThinkPHP6模板编译流程详解 前言:刚开始写博客.如果觉得本篇文章对您有所帮助.点个赞再走也不迟 模板编译流程,大概是: 先获取到View类实例(依赖注入也好,通过助手函数也好) ...
- KMP字符串匹配算法详解
KMP算法利用匹配失败后的信息,尽量减少模式串与主串的匹配次数以达到快速匹配的目的.具体实现就是实现一个next()函数,函数本身包含了模式串的局部匹配信息.时间复杂度O(m+n). Next()函数 ...
- DotNetBar for Windows Forms 12.9.0.0_冰河之刃重打包版及制作Visual Studio C#项目模板文件详解
关于 DotNetBar for Windows Forms 12.9.0.0_冰河之刃重打包版 --------------------11.8.0.8_冰河之刃重打包版-------------- ...
- POJ 3164 Command Network(最小树形图模板题+详解)
http://poj.org/problem?id=3164 题意: 求最小树形图. 思路: 套模板. 引用一下来自大神博客的讲解:http://www.cnblogs.com/acjiumeng/p ...
- 【微信小程序】template模板使用详解
WXML提供模板(template),可以在模板中定义代码片段,然后在不同的地方调用. 模板的作用域: 模板拥有自己的作用域,只能使用 data 传入的数据以及模板定义文件中定义的 <wxs / ...
- 原生twig模板引擎详解(安装使用)
最近在学习SSTI(服务器模板注入),所以在此总结一下 0x00 Twig的介绍 什么是Twig? Twig是一款灵活.快速.安全的PHP模板引擎. Twig的特点? 快速:Twig将模板编译为纯粹的 ...
- Eclipse注释模板设置详解
设置注释模板的入口:Window->Preference->Java->Code Style->Code Template 然后展开Comments节点就是所有需设置注释的元素 ...
随机推荐
- Socket聊天程序——初始设计
写在前面: 可能是临近期末了,各种课程设计接踵而来,最近在csdn上看到2个一样问答(问题A,问题B),那就是编写一个基于socket的聊天程序,正好最近刚用socket做了一些事,出于兴趣,自己抽了 ...
- 记一个mvn奇怪错误: Archive for required library: 'D:/mvn/repos/junit/junit/3.8.1/junit-3.8.1.jar' in project 'xxx' cannot be read or is not a valid ZIP file
我的maven 项目有一个红色感叹号, 而且Problems 存在 errors : Description Resource Path Location Type Archive for requi ...
- 使用webstorm+webpack构建简单入门级“HelloWorld”的应用&&引用jquery来实现alert
使用webstorm+webpack构建简单入门级"HelloWorld"的应用&&构建使用jquery来实现 1.首先你自己把webstorm安装完成. 请参考这 ...
- PHP 5.6 编译安装选项说明
`configure' configures this package to adapt to many kinds of systems. Usage: ./configure [OPTION].. ...
- ASP.NET Core应用针对静态文件请求的处理[2]: 条件请求与区间请求
通过调用ApplicationBuilder的扩展方法UseStaticFiles注册的StaticFileMiddleware中间件帮助我们处理针对文件的请求.对于StaticFileMiddlew ...
- 如何远程关闭一个ASP.NET Core应用?
在<历数依赖注入的N种玩法>演示系统自动注册服务的实例中,我们会发现输出的列表包含两个特殊的服务,它们的对应的服务接口分别是IApplicationLifetime和IHostingEnv ...
- 带你实现开发者头条APP(三) 首页实现
title: 带你实现开发者头条APP(三) 首页实现 tags: 轮播广告,ViewPager切换,圆形图片 grammar_cjkRuby: true --- 一.前言 今天实现开发者头条APP的 ...
- WebApi接口 - 如何在应用中调用webapi接口
很高兴能再次和大家分享webapi接口的相关文章,本篇将要讲解的是如何在应用中调用webapi接口:对于大部分做内部管理系统及类似系统的朋友来说很少会去调用别人的接口,因此可能在这方面存在一些困惑,希 ...
- [C#] C# 知识回顾 - 委托 delegate
C# 知识回顾 - 委托 delegate [博主]反骨仔 [原文]http://www.cnblogs.com/liqingwen/p/6031892.html 目录 What's 委托 委托的属性 ...
- ES6的一些常用特性
由于公司的前端业务全部基于ES6开发,于是给自己开个小灶补补ES6的一些常用特性.原来打算花两天学习ES6的,结果花了3天才勉强过了一遍阮老师的ES6标准入门(水好深,ES6没学好ES7又来了...) ...