激光SLAM
1、激光分类
维度分类:
a、二维激光(单点反射、平面、旋转台)
b、三维激光
距离分类:
a、近距离:壁障、碰撞检测、路边检测
b、远距离:行人检测、定位、建图
特点:
优点:
a、可以直接获取深度信息;
b、不受环境光照影响,比较稳定;
缺点:
a、稀疏性;
b、几何信息区分度小;
SLAM研究历史
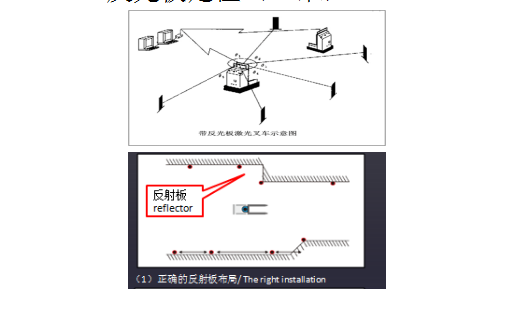
1、反光板定位(二维)
2、ekf特征定位(二维) 主要形式为角点、线。 一般要配以里程计、imu,或者运动模型来提供运动预测 算法以ekf、粒子滤波等模型形式。
http://blog.csdn.net/renshengrumenglibing/article/details/8604245
3、点或特征的ICP(二维) 里程计推导用直接的ICP替代了之前的efk过程。 定位使用粒子滤波方式。 最有代表性的是gmapping
4、技巧 1.去除信息量较少的点、例如分割去除地面、动态物体等 2.只提取一些关注信息,例如路牙 3.多种方法融合,ndt和特征、激光和相机等。 4.往二维方法上靠,二维网格、二维配准方法等。 5.隐性的借鉴十年前的有效方法 6.更强调工程型,例如行人检测等内容 7.闭环检测很多情况下不需要、不现实。(A Flexible and Scalable SLAM System with Full3D Motion Estimation)。
LOAM
激光SLAM的更多相关文章
- 激光SLAM Vs 视觉SLAM
博客转载自:https://www.leiphone.com/news/201707/ETupJVkOYdNkuLpz.html 雷锋网(公众号:雷锋网)按:本文作者SLAMTEC(思岚科技公号sla ...
- 激光SLAM与视觉SLAM的特点
激光SLAM与视觉SLAM的特点 目前,SLAM技术被广泛运用于机器人.无人机.无人驾驶.AR.VR等领域,依靠传感器可实现机器的自主定位.建图.路径规划等功能.由于传感器不同,SLAM的实现方式也有 ...
- 2D激光SLAM算法比较+cartographer
Hector slam: Hector slam利用高斯牛顿方法解决scan-matching问题,对传感器要求较高. 缺点:需要雷达(LRS)的更新频率较高,测量噪声小.所以在制图过程中,需要rob ...
- 主流视觉SLAM、激光SLAM总结
SLAM预备知识 SLAM for Dummies 全文总结 视觉里程计 卡尔曼滤波推导 MonoSLAM MonoSLAM:Real-Time Single Camera SLAM全文总结 PTAM ...
- SLAM学习笔记(2)SLAM算法
SLAM算法分为三类:Kalman滤波.概率滤波.图优化 Kalman滤波方法包括EKF.EIF:概率滤波包括RBPF,FastSLAM是RBPF滤波器最为成功的实例, 也是应用最为广泛的SLAM方法 ...
- 视觉slam学习之路(一)看高翔十四讲所遇到的问题
目前实验室做机器人,主要分三个方向,定位导航,建图,图像识别,之前做的也是做了下Qt上位机,后面又弄红外识别,因为这学期上课也没怎么花时间在项目,然后导师让我们确定一个方向来,便于以后发论文什么. ...
- SLAM+语音机器人DIY系列:(六)SLAM建图与自主避障导航——2.google-cartographer机器人SLAM建图
摘要 通过前面的基础学习,本章进入最为激动的机器人自主导航的学习.在前面的学习铺垫后,终于迎来了最大乐趣的时刻,就是赋予我们的miiboo机器人能自由行走的生命.本章将围绕机器人SLAM建图.导航避障 ...
- SLAM+语音机器人DIY系列:(二)ROS入门——7.理解tf的原理
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- SLAM+语音机器人DIY系列:(三)感知与大脑——5.机器人大脑嵌入式主板性能对比
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话.朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人.实现的关键是让机器人能通过传感器感知周围环境,并通过 ...
随机推荐
- git操作-如何把你的本地仓库放到GitHub已有仓库
本地: 首先在你的本地git init 初始化一个仓库,然后git add . 将所有的文件都打包到仓库中,git -commit -m "first_commit" 此时是没有什 ...
- poj 1703 Find them, Catch them(种类并查集和一种巧妙的方法)
Find them, Catch them Time Limit: 1000MS Memory Limit: 10000K Total Submissions: 36176 Accepted: ...
- anaconda的所有版本大全--下载地址
地址: https://repo.continuum.io/archive/ 内容: Anaconda installer archive Filename Size Last Modified MD ...
- centos 在CentOS下编译FFmpeg
所需软件 准备 yum install autoconf automake gcc gcc-c++ git libtool make nasm pkgconfig zlib-devel -y 新版还 ...
- ORACLE 36进制和10进制,互相转换函数
第一部分 --36转10进制 create or replace function f_36to10 (str varchar) return int is returnValue int; s ...
- linux上查看系统内核版本命令(转载)
uname -a uname -r 查看发行版本信息: 在RedHat系统里,存在一个/etc/redhat-release文件,里面保存了发行版的版本信息 $cat /etc/redhat-rele ...
- linux新建文件和文件夹命令
1.touch命令 touch命令用来修改文件的访问时间.修改时间.如果没有指定时间,则将文件时间属性改为当前时间. 当指定文件不存在,touch命令变为创建该文件. 语法: touch [-acm] ...
- 九度OJ 1141:Financial Management (财务管理) (平均数)
时间限制:1 秒 内存限制:32 兆 特殊判题:否 提交:939 解决:489 题目描述: Larry graduated this year and finally has a job. He's ...
- TTimer源码研究
TTimerProc = procedure of object; IFMXTimerService = interface(IInterface) ['{856E938B-FF7B-4E13-85D ...
- 阻止SSIS import excel时的默认行为
为什么SSIS总是错误地获取Excel数据类型,以及如何解决它! 由Concentra发布 2013年5月15日 分享此页面 分享 发现Concentra的分析解决方案 Concentra的分析和 ...