ROS导航之地图costmap_2d与bresenham算法
costmap_2d:
bresenham算法:
算法推导:
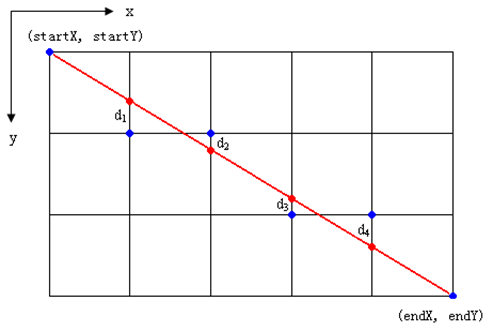
假设我们需要由(x0,y0)这一点,绘画一直线至右下角的另一点(x1,y1),x,y分别代表其水平及垂直座标,并且x1-x0>y1-y0。在此我们使用计算机视觉常用坐标系即,x座标值沿x轴向右增长,y座标值沿y轴向下增长。
因此x及y之值分别向右及向下增加,而两点之水平距离为 
 且垂直距离为y1-y0。由此得之,该线的斜率必定介乎于1至0之间。而此算法之目的,就是找出在
且垂直距离为y1-y0。由此得之,该线的斜率必定介乎于1至0之间。而此算法之目的,就是找出在
 与
与
 之间,第x行相对应的第y列,从而得出一像素点,使得该像素点的位置最接近原本的线。
之间,第x行相对应的第y列,从而得出一像素点,使得该像素点的位置最接近原本的线。
对于由(x0,y0)及(x1,y1)两点所组成之直线,公式如下:

因此,对于每一点的x,其y的值是

因为x及y皆为整数,但并非每一点x所对应的y皆为整数,故此没有必要去计算每一点x所对应之y值。反之由于此线之斜率介乎于1至0之间,故此我们只需要找出当x到达那一个数值时,会使y上升1,若x尚未到此值,则y不变。至于如何找出相关的x值,则需依靠斜率。斜率之计算方法为
 。由于此值不变,故可于运算前预先计算,减少运算次数。
。由于此值不变,故可于运算前预先计算,减少运算次数。
要实行此算法,我们需计算每一像素点与该线之间的误差。于上述例子中,误差应为每一点x中,其相对的像素点之y值与该线实际之y值的差距。每当x的值增加1,误差的值就会增加m。每当误差的值超出0.5,线就会比较靠近下一个映像点,因此y的值便会加1,且误差减1。
下列伪代码是这算法的简单表达(其中的plot(x,y)绘画该点,abs返回的是绝对值)。虽然用了代价较高的浮点运算,但很容易就可以改用整数运算。
function line(x0, x1, y0, y1)
int deltax := x1 - x0
int deltay := y1 - y0
real error :=
real deltaerr := deltay / deltax // 假設deltax != 0(非垂直線),
// 注意:需保留除法運算結果的小數部份
int y := y0
for x from x0 to x1
plot(x,y)
error := error + deltaerr
if abs (error) ≥ 0.5 then
y := y +
error := error - 1.0
costmap_2d:
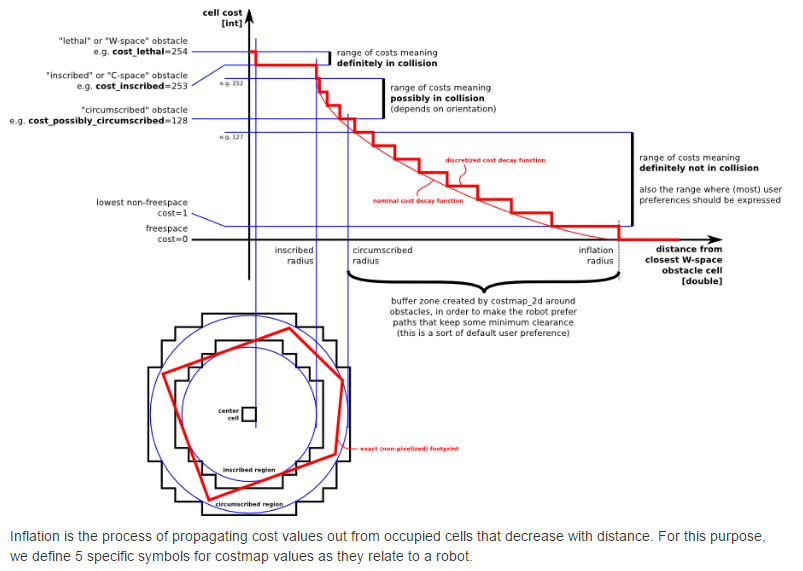
costmap_2d::Costmap2DROS,每一层中使用pluginlib实例化Costmap2DROS和每一层都被添加到LayeredCostmap)各个层可以被独立的编译。ROS导航之地图costmap_2d与bresenham算法的更多相关文章
- ROS导航包的介绍
博客转载自:https://blog.csdn.net/handsome_for_kill/article/details/53130707#t3 ROS导航包的应用 利用ROS Navigation ...
- ROS机器人导航一 : 从英雄联盟到ROS导航
写在前面: 这是这个系列的第一篇 本系列主要从零开始深入探索ROS(机器人操作系统)的导航和规划. 这个系列的目标,是让大家了解: 1.ROS的导航是怎么实现的 2.认识ROS里各种已有的导航算法,清 ...
- 《图形学》实验七:中点Bresenham算法画椭圆
开发环境: VC++6.0,OpenGL 实验内容: 使用中点Bresenham算法画椭圆. 实验结果: 代码: #include <gl/glut.h> #define WIDTH 50 ...
- 《图形学》实验六:中点Bresenham算法画圆
开发环境: VC++6.0,OpenGL 实验内容: 使用中点Bresenham算法画圆. 实验结果: 代码: #include <gl/glut.h> #define WIDTH 500 ...
- 《图形学》实验五:改进的Bresenham算法画直线
开发环境: VC++6.0,OpenGL 实验内容: 使用改进的Bresenham算法画直线. 实验结果: 代码: //中点Bresenham算法生成直线 #include <gl/glut.h ...
- 《图形学》实验四:中点Bresenham算法画直线
开发环境: VC++6.0,OpenGL 实验内容: 使用中点Bresenham算法画直线. 实验结果: 代码: //中点Bresenham算法生成直线 #include <gl/glut.h& ...
- 利用canvas实现的中点Bresenham算法
Bresenham提出的直线生成算法的基本原理是,每次在最大位移方向上走一步,而另一个方向是走步还是不走步取决于误差项的判别,具体的实现过程大家可以去问度娘.我主要是利用canvas画布技术实现了这个 ...
- 通过Bresenham算法实现完成矢量线性多边形向栅格数据的转化
1.实验目的与要求 目的:通过本次实验,完成矢量线性多边形向栅格数据的转化过程: 要求:采用VC++6.0实现. 2.实验方法 采用Bresenham算法实现 3.实验材料 直线的定义:y = x/3 ...
- Bresenham算法画填充圆及SDL代码实现
画圆是计算机图形操作中一个非常重要的需求.普通的画圆算法需要大量的浮点数参与运算,而众所周知,浮点数的运算速度远低于整形数.而最终屏幕上影射的像素的坐标均为整形,不可能是连续的线,所以浮点数运算其实纯 ...
随机推荐
- Java程序运行的内存分配
Java的内存分配 A:栈 存储局部变量 B:堆 存储所有new出来的 C:方法区(程序代码及方法相关) D:本地方法区(系统相关) E:寄存器(CPU使用) 注意: a:局部变量 在方法定义中或者方 ...
- [原创]用逻辑嗅探破解接触式IC卡口令
最近两周对接触型IC卡很感兴趣,就动手实践了一下,最终实现的效果是通过破解IC卡口令实现对数据修改,然后就可以随意洗衣服喽~IC卡从数据传递方式上划分为接触型和非接触型两种.接触型的卡片表面有金属贴片 ...
- Solr学习、安装与Quick Start
之前用Lucene进行了一些简单的例子,现在安装Solr学习一下. 在mac下,貌似可以直接brew install solr来进行安装.尝试一下. 貌似安装成功了: ==> Summary
- 正点原子STM32探索者学习笔记1
1.在STM32的数据手册中,引脚定义中的I/O structure中如果是FT的话,说明该引脚兼容5V: 2.IO口一般都有多个功能,可以通过寄存器的设置来选择其IO口的功能,F1还有重映射的概念, ...
- android中实现内容搜索
在编写android搜索代码的时候,怎样去实现搜索功能,考虑中的有两种: 自己定义搜索方法: 1.自己定义搜索输入框,搜索图标,搜索button 2.自己定义语音输入方法 3.自己定义经常使用热词内容 ...
- 高精度整数 - a+b(王道)
题目描述: 实现一个加法器,使其能够输出a+b的值. 输入: 输入包括两个数a和b,其中a和b的位数不超过1000位. 输出: 可能有多组测试数据,对于每组数据,输出a+b的值 样例输入: 2 6 1 ...
- NDK官方开发指南翻译之 NDK_GDB
这几天看JNI,没有基础,那真是难受--把看到的相关资料记录一下,也分享给刚開始学习的人. 'ndk-gdb' Overview 重要:假设你要调试线程相关的程序.请阅读以下的'Thread Supp ...
- [HTML5] Render Hello World Text with Custom Elements
Custom elements are fun technology. In this video, you will learn how to set one up and running in l ...
- 微信小程序bindtap和catchtap区别
bindtap可以产生冒泡事件 catchtap只自身触发事件,不会传递到父视图 文章来源:刘俊涛的博客 地址:http://www.cnblogs.com/lovebing 欢迎关注 ...
- mui 选项卡
方法一:通过css 实现选项卡 <div id="slider" class="mui-slider"> <div id="slid ...